在上面介绍的硬件平台进行了系统的软件设计,首先对SVPWM的实现方法进行了讨论,随后给出某些重要的软件流程。
6.5.3.1 SVPWM技术的参数计算
由前面的介绍可以知道,输出的参考相电压矢量UOUT可由UX和UX±60线性时间组合来合成,它等于t1/TPWM倍的UX与t2/TPWM倍的UX±60的矢量和,即

根据三角形的正弦定理有


由上述两个公式解得


公式中,TPWM可以事先选定,UOUT可以由U/F曲线确定;θ可由输出正弦电压角频率w和nTPWM的乘积确定。因此,当已知两个相邻的基本电压空间矢量UX和UX±60后,根据公式可以确定t1和t2。
此外,t1和t2还有另外一种确定的方法。当UOUT、UX和UX±60投影到平面直角坐标系中可以得到系列公式

当已知逆矩阵
和UOUT在平面直角坐标系的投影
后,就可以确定t1和t2。
当逆变器单独输出零矢量O000和O111时,电动机的定子磁链矢量ψ是不动的。根据这一特点,在TPWM期间插入零矢量作用的时间,使得
TPWM=t1+t2+t0 (6-10)
通过这样的方法,可以调整角频率w,从而达到变频的目的。
添加零矢量应遵循功率开关管的开关次数最少的原则来选择O000或O111。为了使磁链的运动速度平滑,零矢量一般都不是集中的加入,而是将零矢量平均分成几份,多点地插入到磁链轨迹中,但作用的时间和仍为t0,这样就可以减少电动机转矩的脉动。
6.5.3.2 扇区号的确定
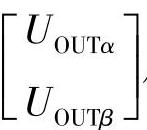
将图6-42划分成6个区域,称为扇区。每个区域都有一个扇区号。确定UOUT位于哪个扇区是非常重要的,因为只有知道UOUT位于哪个扇区才能知道用哪一对相邻的基本电压空间矢量去合成UOUT。
确定UOUT所在的扇区号有两种方法,下面将介绍其中一种方法:
当UOUT以Oαβ坐标系上的分量UOUTα和UOUTβ给出时,先用下式计算B0、B1、B2
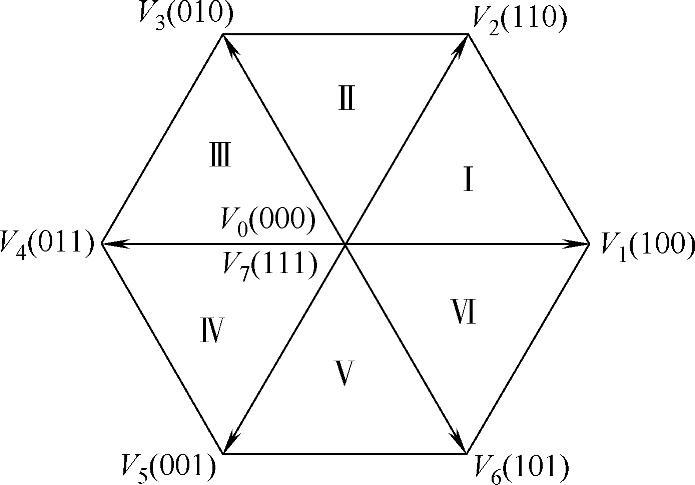
图6-42 基本电压空间矢量示意图

再计算P值
P=4sign(B2)+2sign(B1)+sign(B0) (6-12)
式中,sign(x)是符号函数。若X>0,sign(x)=1;若X<0,sign(x)=0。然后,根据表6-3,查出扇区号。(https://www.daowen.com)
表6-3 P值与扇区号的对应表

另一种方法是当UOUT以幅值和相角的形式给出时,可直接根据相角来确定它所在的扇区。
当由六个基本电压空间矢量合成的UOUT以近似圆形轨迹旋转时,其圆形轨迹的旋转半径受六个基本电压空间矢量幅值的限制,最大的圆形轨迹式六个基本矢量幅值所组成的正六边形的内接圆。因此,UOUT的最大幅值,同时也是最大轨迹圆的半径。
6.5.3.3 SVPWM技术的软件实现方法
利用TI公司的TMS320F2812 DSP可以很容易地实现电压空间矢量SVPWM的控制。
对每一个电压空间矢量PWM波的零矢量分割方法不同,以及对非零矢量UX的选择不同,会产生多种SVPWM波。因此,分割方法选择的原则主要有以下几种:
1)尽可能使功率开关管的开关次数减少;
2)任意一次电压空间矢量的变化只能有一个桥臂的开关管动作;
3)编程容易。
利用软件编程时,在连续增/减计数模式下,由扇区判断所要使用向量,由转角增量计算作用时间,根据开关管开关次数最少和任意一次只有一个桥臂开关管动作的原则,形成七段式电压空间矢量PWM波形。它由3段零矢量和4段相邻的两个非零矢量构成,3段零矢量分别位于PWM波的开始、中间和结尾。图6-43为磁链在第0扇区的PWM波形。
图6-43 SVPWM控制波形
对于本文所采用的七段式电压空间矢量PWM波形,其中每个扇区Ux、Ux±60的选择顺序如图6-44所示,即在第0扇区,UX=U0,UX±60=U60。
6.5.3.4 软件流程
1)主程序主要是对系统进行初始化,它包括四个环节:系统初始化、系统保护动作、开中断和循环等待。主程序各主要部分的具体流程如图6-45所示。
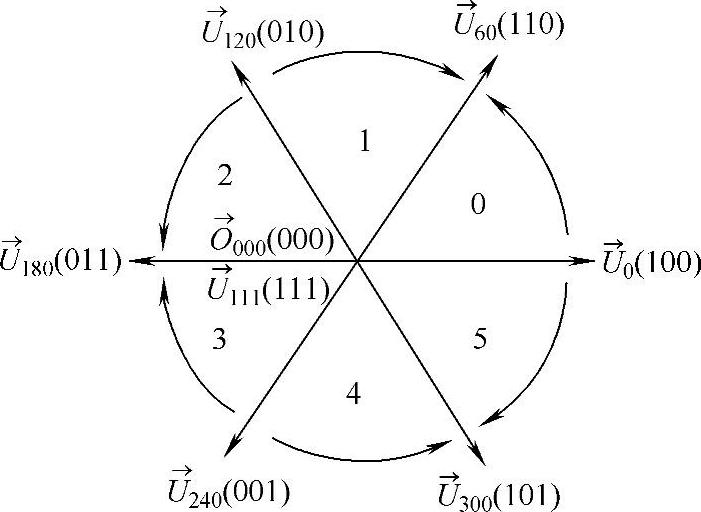
图6-44 基本电压空间矢量选择顺序
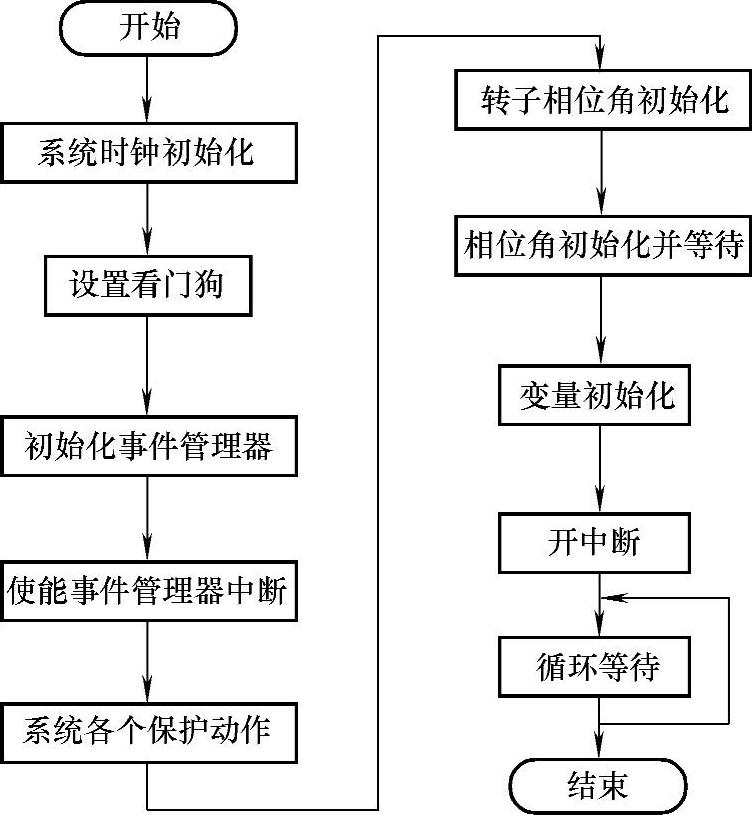
图6-45 主程序流程图
2)系统初始化流程框图如图6-46所示。对系统控制寄存器和功能寄存器的初始化配置,比如SPI、CAN模块和EV模块等。给重要的运行参数和变量赋初值,比如PI调节器参数、载波频率等。
3)SVPWM子程序流程图。上面分析了SVPWM的产生原理,在此不作赘述。图6-47为SVPWM子程序流程图。
4)定时器T1下溢中断 当定时器T1发生下溢中断时,转入定时器T1下溢中断服务子程序,如图6-48所示。
T1定时器的下溢中断标志启动A/D转换,A/D转换结束标志启动中断服务子程序。这样做的好处是执行A/D采样不占用CPU,从而保证系统能够快速地进行速度和电流全数字双闭环处理,在中断服务子程序中完成对电动机电流调节和转速控制。
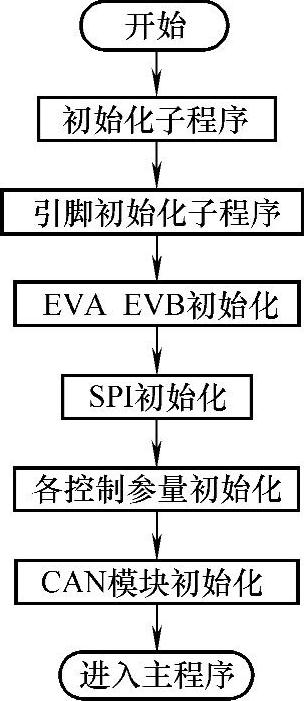
图6-46 初始化程序流程图
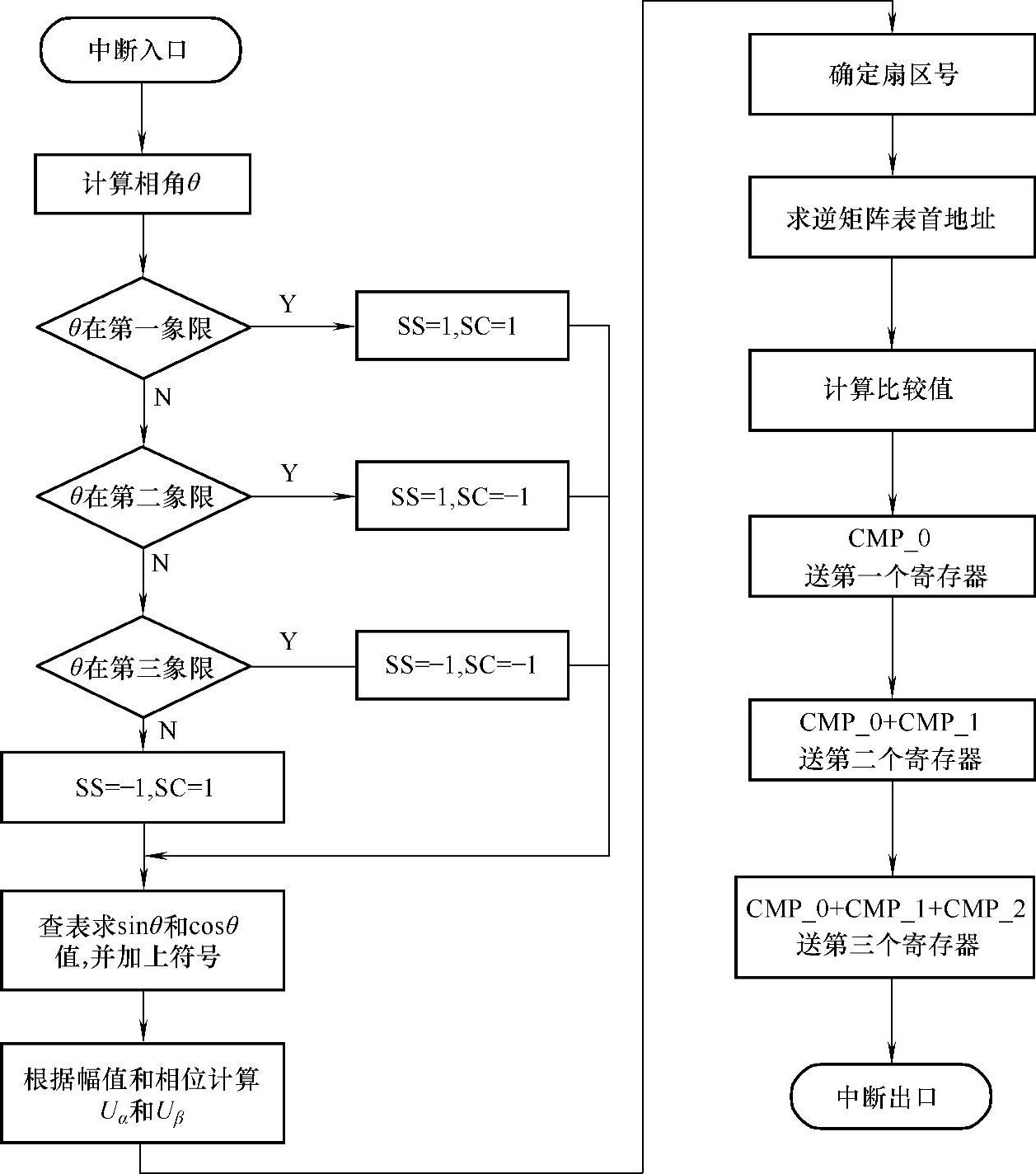
图6-47 SVPWM子程序流程图
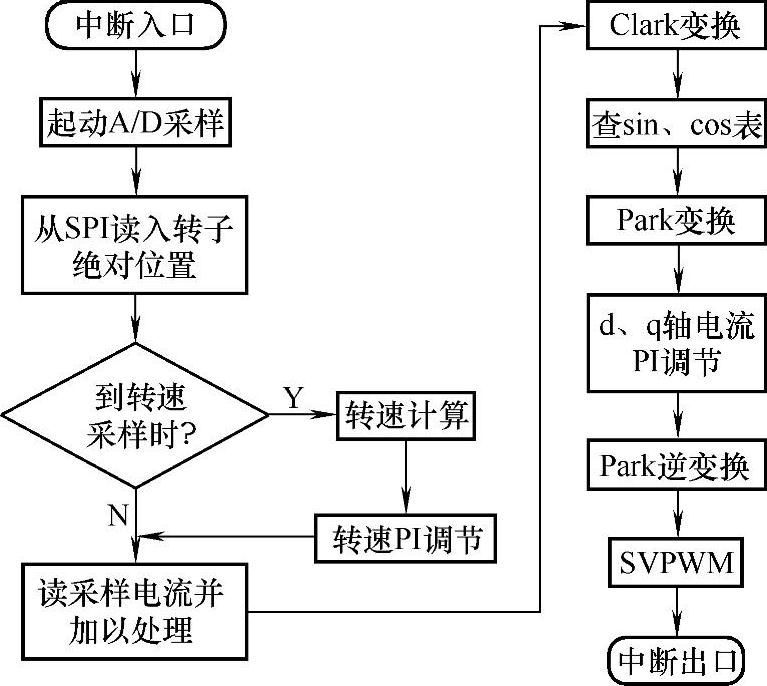
图6-48 定时器T1中断服务子程序流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






