本小节为本章的核心内容,主要包括CVT控制系统构成、微处理器的选择、TCU输入信号的检测和输出驱动电路等内容。
4.4.2.1 CVT控制系统构成简介
CVT控制系统的结构主要是由传感器、电磁离合器、变速比电动机和TCU等部分构成,如图4-5所示。CVT控制系统结构如图4-6所示。
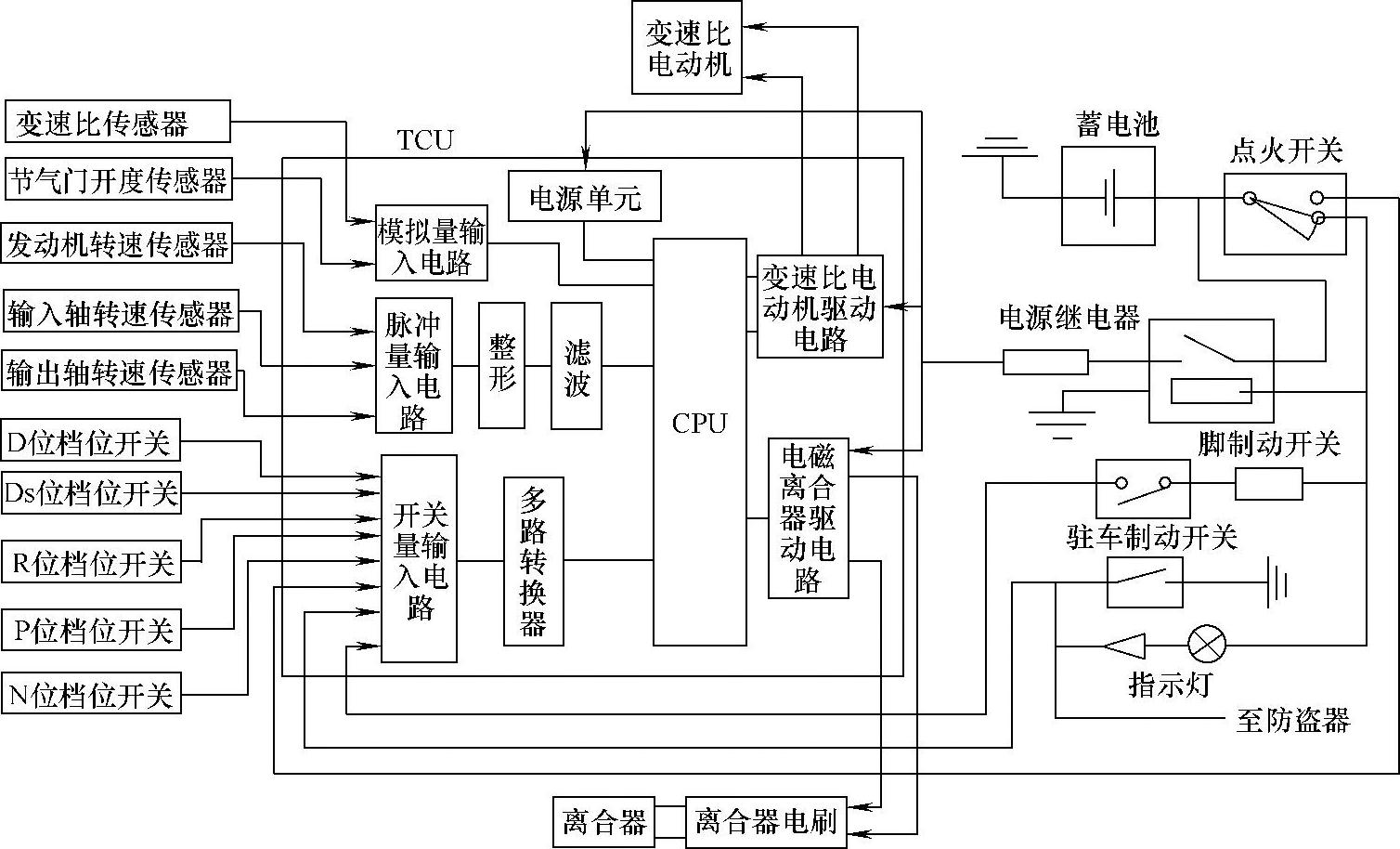
图4-5 CVT控制系统框图
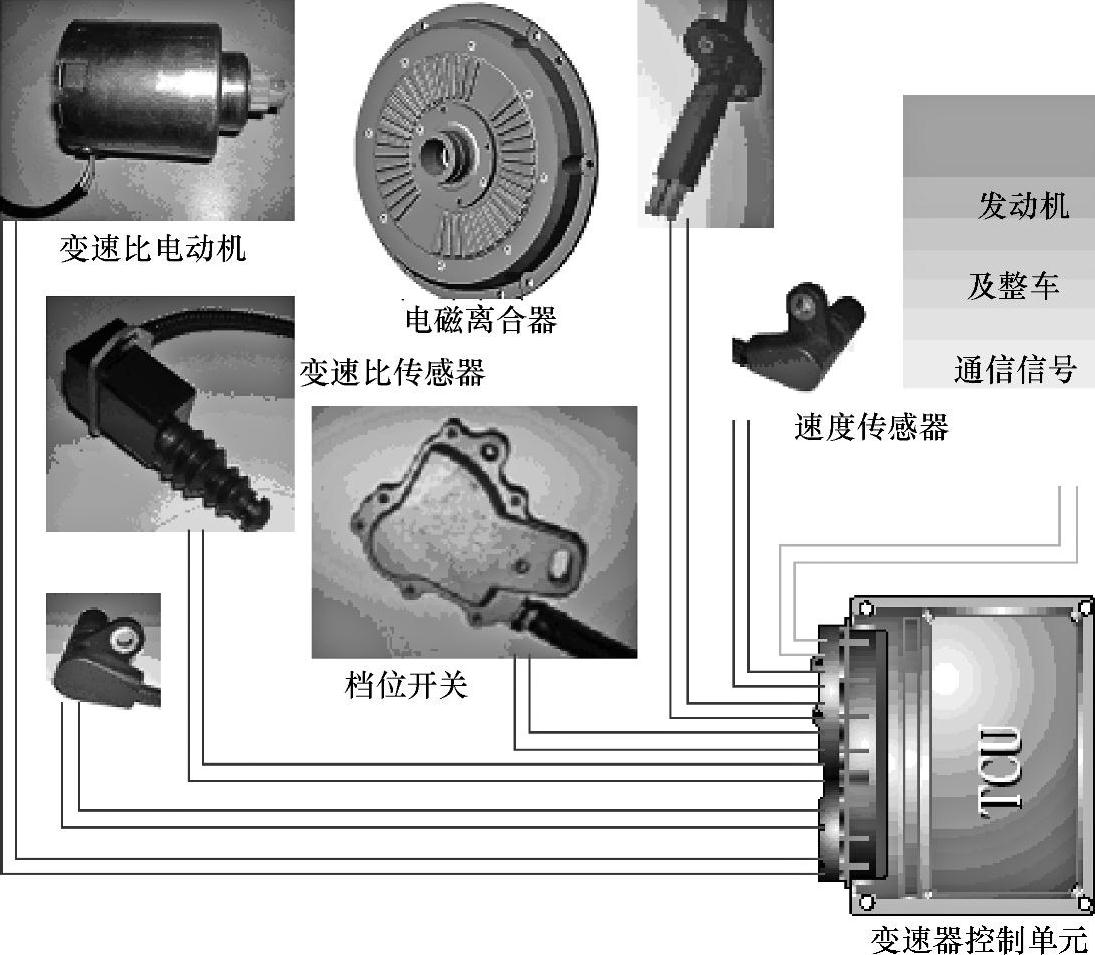
图4-6 CVT控制系统结构
TCU主要由微处理器、脉冲输入捕捉电路、模拟量输入电路、开关量输入电路、电动机和电磁离合器驱动电路、电源电路、通信电路等单元电路组成,其外形结构如图4-7所示。
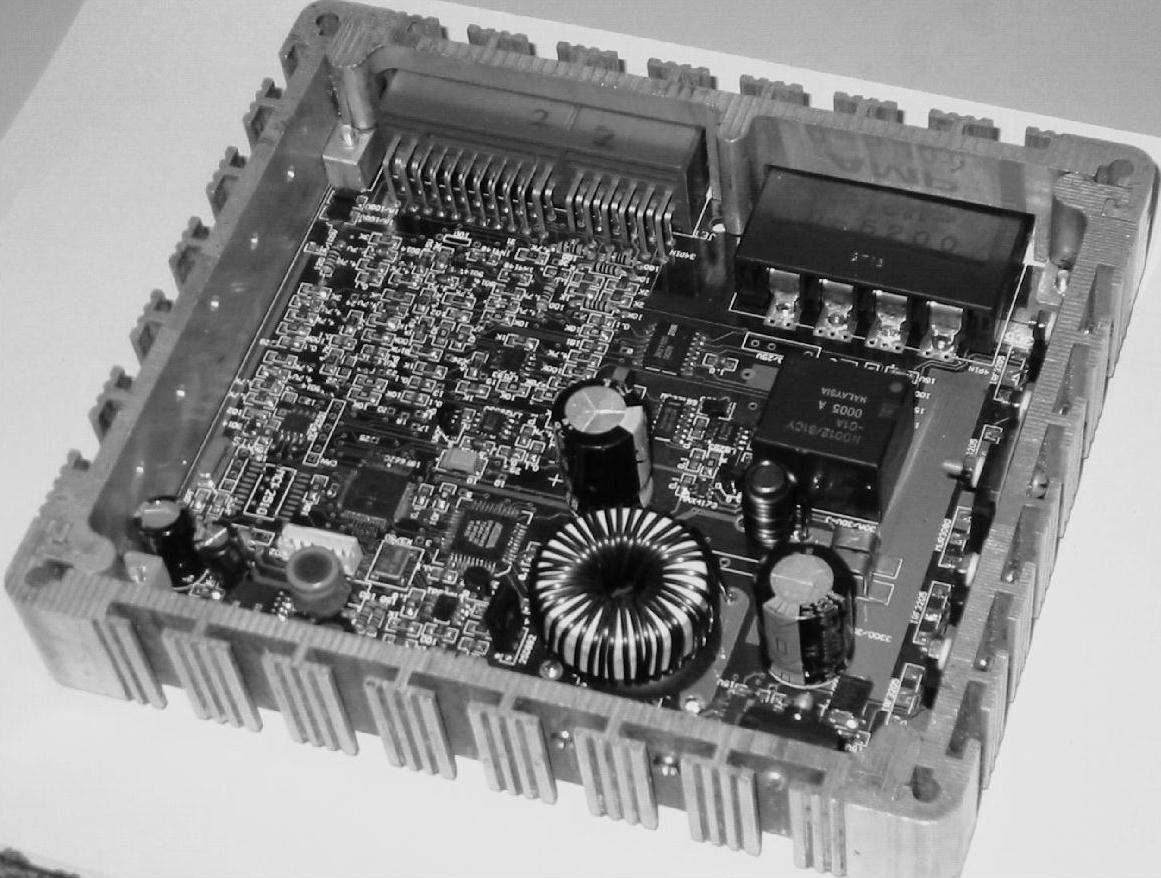
图4-7 TCU外形结构
其中,CPU选用Microchip公司生产的PIC18f6620芯片。对发动机转速,CVT输入和输出的测试,我们采用电磁传感器,传感器输出的脉冲信号经处理后,输入到TIM1定时器接口模块通道上,通过计数,换算出对应的转速。节气门位置传感器采用电位器传感器,模拟电压信号通过采样和滤波后进入A/D转换器,再经过数值运算转换为对应的节气门开度。在开关量输入信号中,档位信号代表驾驶员所挂的档位,在控制过程中,系统首先要检测到档位、制动、输入轴转速、输出轴转速、发动机转速、油门开度等输入信号,然后对输入信号进行处理,根据控制策略计算得到相应的变速比和电磁离合器的传递转矩,然后通过对变速比电动机和电磁离合器的控制,实现对CVT的变速比和传递转矩的控制。
4.4.2.2 TCU的微处理器选择
微处理器是汽车电子装置的核心器件,担负着控制、运算、信号转换及处理、故障诊断和通信等多项工作,汽车中的大部分电子控制装置都或多或少地采用了不同架构、不同性能的微处理器。对于微处理器的选择主要从两个方面考虑:微处理器的性能和微处理器的功能,两者必须同时满足。决定微处理器性能的主要指标有:微处理器的工作温度范围、工作电压范围、工作频率,数据总线宽度,存储空间大小,是否具有锁相环(Phase Locked Loop,PLL)倍频和防静电放电(Electro Static Discharge,ESD)等性能。微处理器的功能是指微处理器所具有的功能模块的功能,如定时/计数功能模块、PWM功能模块、A/D转换功能模块、看门狗功能模块、输入/输出特性、指令系统与编程语言和通信功能等。
在满足上述性能和功能的条件下,选择制造厂商也是很重要的。汽车电子中微处理器的选择首先应是成熟的,其次才是先进的,由于微处理器的价格相对较低,因此尽可能选择高性能的微处理器。
TCU的微处理器选用了XC164CS型16位微处理器。它具有高性能的CPU内核及大容量的片内RAM(4KB)和片内Flash(128KB),具有快速的中断响应能力和上下文切换能力。XC164CS型微处理器是Infineon公司的XC166族中一种新型微处理器。它是Infineon 16位微处理器家族前四代产品派生出的精华版。通过不断地改进和增加外围控制单元,它的性能也在不断增强,测量与控制单元引入了数字信号处理(Digital Signal Processing,DSP)功能,大大减少了乘法和除法的运算时间,同时也加强了捕获/比较单元的功能,而且具有较好的性能价格比。
XC164CS型微处理器具有100个引脚的塑料薄型四边引线扁平封装(TQFP)。它的主要性能和功能指标如下:
1)具有4级流水线的高性能16位CPU:
●指令周期为40ns(25MHz的CPU时钟);
●16位×16位乘法执行时间为40ns,32/16位除法执行时间为800ns;
●增强的位操作功能;
●支持高级语言和操作系统的附加指令;
●具有多个可改变的寄存器组;
●单个周期的上下文切换;
●1024B的专用寄存器区;
2)32个中断源,16个优先级的中断系统。
3)8通道经由周边事件控制器(PEC)用中断驱动的单周期数据传递。
4)系统时钟可由输入时钟及其分频生成,或通过片内锁相环(PLL)生成。
5)片内的存储器模块:
●2KB的双端口RAM(DPRAM)用于变量、寄存器和堆栈;
●2KB的片内高速数据SRAM(DSRAM)用于变量和堆栈;
●2KB的片内高速编程SRAM(PSRAM)用于程序代码和数据;
●128KB的片内可编程存储区(Flash)用于程序代码和数据。
6)最大为4MB的外部存储空间,存放代码和数据;可编程的用于不同寻址范围的外部总线;复用的或分离的外部地址/数据总线,数据总线为8位或16位;4个可选的片选信号(CS0~CS3)。
7)灵活管理功率的空闲模式、休眠模式和掉电模式。
8)片内的周边功能模块:
●14通道,10或8位A/D转换器,转换时间为7.8μs;
●多功能通用定时器单元,3个16位定时器;
●2个串行接口(同步/异步通道和高速同步通道);
●16通道16位的通用捕获/比较单元(CAPCOM2);
●产生灵活PWM信号的捕获/比较单元(CAPCOM6);
●片内的有15个报文的完整CAN接口(V2.0B);
●片内的实时时钟。
9)最多有79个一般的I/O口线。
10)可编程的监视定时器和振荡器监视器。
11)安装在片内的自举引导程序。
这些功能完全可以满足变速器控制器设计要求。
4.4.2.3 TCU输入信号的检测
1.转速测量电路及方法
从电磁传感器出来的是近似正弦波的信号,经过电路的削波和滤波以及施密特电路整形后,变为5V的方波信号输入到微处理器的时钟输入端口上,信号处理电路如图4-8所示。
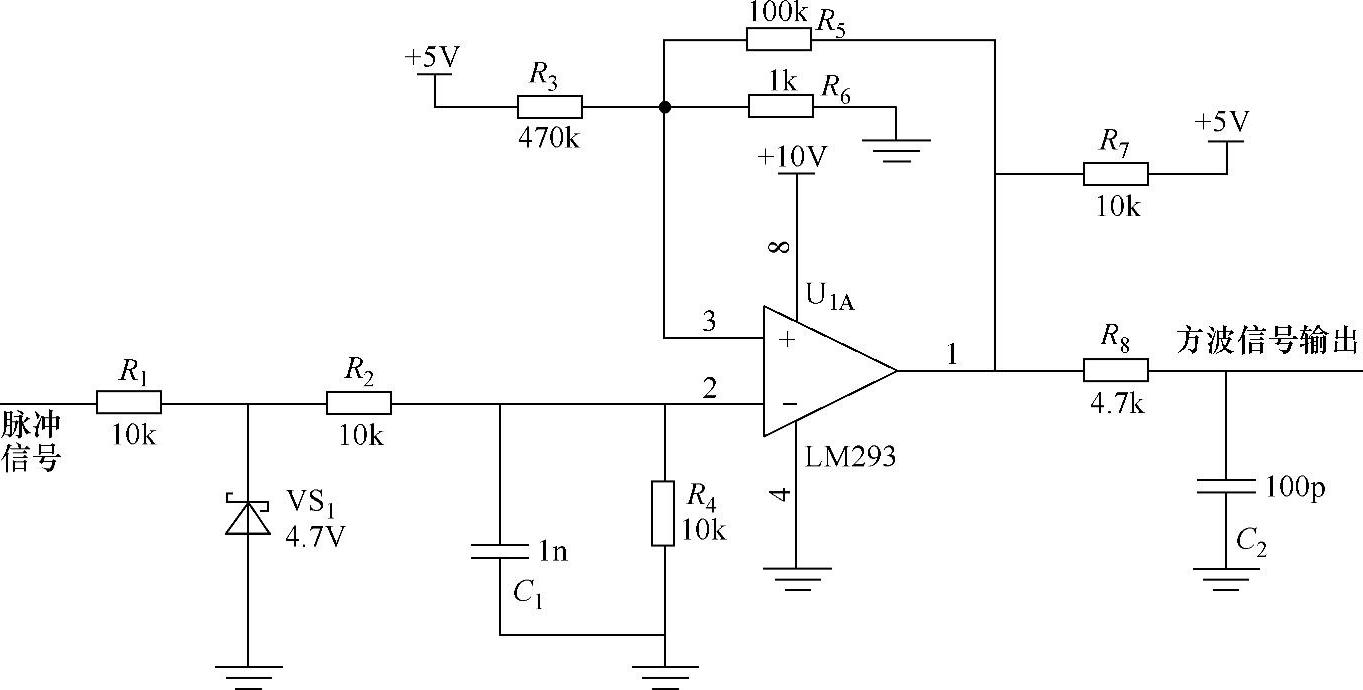
图4-8 转速信号处理电路原理图
当方波信号输入到微处理器的时钟输入端口时,有两种方法来测量转速:一种是周期法;另一种是计数法。
周期法是记录方波中相邻两个下降沿中的持续时间,即微处理器内晶体振荡器的振荡次数或经过分频后的振荡次数。具体的方法是:当方波出现一个下降沿,触发计数器开始计数,系统晶体振荡器每振动一次,计数器自动加一,当下一个下降沿出现时,计数器停止计数。假设计数器的值为sum,系统计数时钟频率为10MHz,转轴每转一周,传感器输出10个方波脉冲,此时转速ne为
ne=60×10×106/(10×sum) (4-1)
另一种方法是计数法,定时1s,记录中间出现多少个脉冲方波,方波个数乘60,即为转速。
两种方法各有利弊,周期法在低速时测量较准确,而计数法适合在于高转速。本系统中输入轴转速和输出轴转速通过传感器出的信号频率比较高,适合采用计数法。
2.简单的开关量检测电路
汽车中有许多开关,如制动开关、档位开关、油门开关等。汽车中的开关同其他电气开关类似。对于简单的开关,通常由一对触点、两根引线(或端子)及其他机械部分组成。与其他电气线路接线不同的是,为了减少线束,汽车中的电气开关接入对应的电子控制单元(ECU)时,通常只引入开关的一根接线,而将开关的另外一根引线接到汽车蓄电池的正极或负极(通称“接地”或“搭铁”),因此对于ECU内部,对开关信号的处理电路就分为:开关公共点为蓄电池正极的开关量检测电路和开关公共端为地的开关量检测电路,分别如图4-9和图4-10所示。
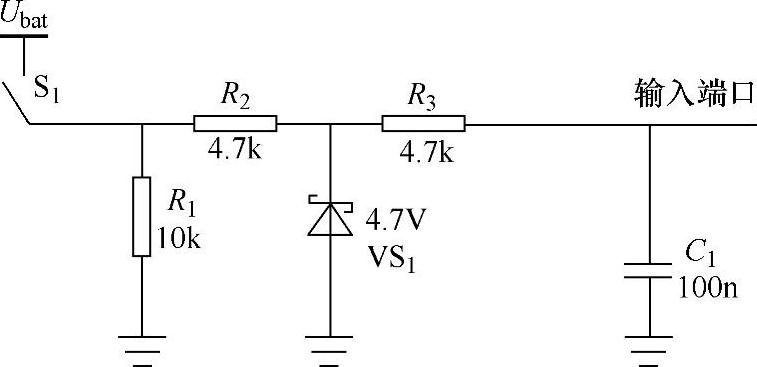
图4-9 开关公共端为蓄电池正极的开关量检测原理电路
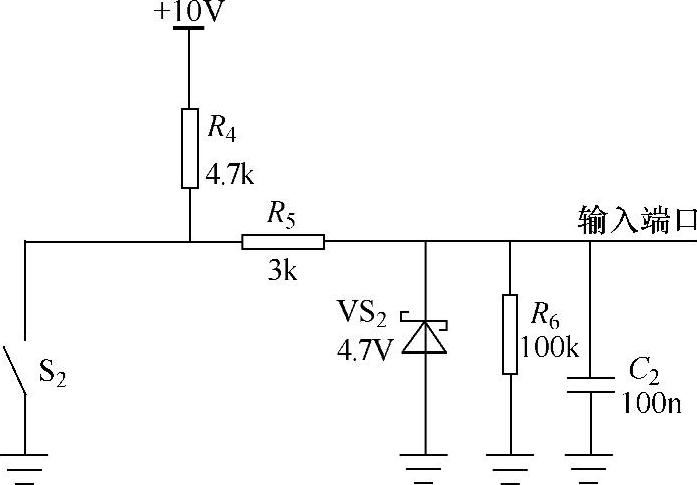
图4-10 开关公共端为地的开关量检测原理电路
图4-9所示是开关公共端为蓄电池正极的开关量检测原理电路,图中R2与V构成了钳位电路,无论汽车中蓄电池的电压(BAT点)是12V或24V,只要开关S1接通,钳位电路就会将稳压二极管负端的电位钳位在4.7V,以满足微处理器输入信号逻辑电平的需要。R3和C1组成了一阶无源滤波器,其作用是减弱开开关过程的抖动影响。R1的作用是当开关断开时为C1提供放电回路,即开关断开时C1上的电荷可通过R3、R2和R1接地放电,以确保开关断开时,输入到微处理器的信号为低电平。
图4-10所示为开关公共端为地的开关量检测原理电路。图中,R4为上拉电阻,即当开关S2断开时,R4、R5和VS2组成钳位电路,使接入到微处理器的输入信号为高电平。当S2接合后,C2通过R5放电,使接入到微处理器的输入信号为低电平。图中,R5和C2组成了一阶无源滤波器,作用同图4-9中的R3和C1。
3.先进的集成开关量检测电路
目前所用的开关量检测电路,除了以上两种以外,还有更先进的方法,即采用集成电路。在此以摩托罗拉公司的MC33884进行介绍。其内部框图如图4-11所示。MC33884是单片集成的开关监测接口芯片。它在低压微处理器以及电子开关之间提供了一个高效的接口。该器件提供开关触点的上拉和下拉电流,同时监测输入电压电平。所有输入引脚接上一个静态放电电容之后,具有瞬态保护功能。MC33884可运行在以下4种模式:睡眠、正常、轮询和轮询+INT定时器。在睡眠模式下,漏电流会下降到静态电流,如此一来,芯片也就不工作了;在正常工作模式下,一旦外部开关的状态发生变化,就会向微处理器发出中断请求;在轮询模式下,微处理器周期性地读取开关的状态,一旦外部开关处于合上状态,将产生一个中断信号;轮询+INT定时器模式和轮询模式功能相近,不仅在外部开关处于合上状态时产生中断信号,在内部中断定时器溢出时也会产生一个中断信号。一般来说,最终送入到微处理器的中断信号都是在该模式下产生的。所有工作模式都可以通过串行外围设备接口(Serial Peripheral Interface,SPI)控制进行编程,SPI命令的响应将返回开关状态和模式设置。具体地说,MC33884具有如下特性:
1)在7.0~26V范围内供电,器件均可正常工作;在5.5~7.0V范围内供电,器件仍可实现部分功能;
2)输入信号电压范围为-14~40V;
3)器件可通过SPI协议与微处理器直接相连;
4)采用24脚引线式贴片封装;
5)一旦监测到开关状态的变化即可唤醒器件;
6)4个可编程开关到地或电池输入;
7)另有6个具有固定功能的开关到地输入,2个具有固定功能的开关到电池输入;
8)正常工作模式的静态电流为100μA;睡眠模式的静态电流<10μA;
9)复位之后器件默认工作模式为睡眠模式;
10)正常工作模式下,开关状态的改变将激活中断信号;
11)工作温度范围为-40~105℃。
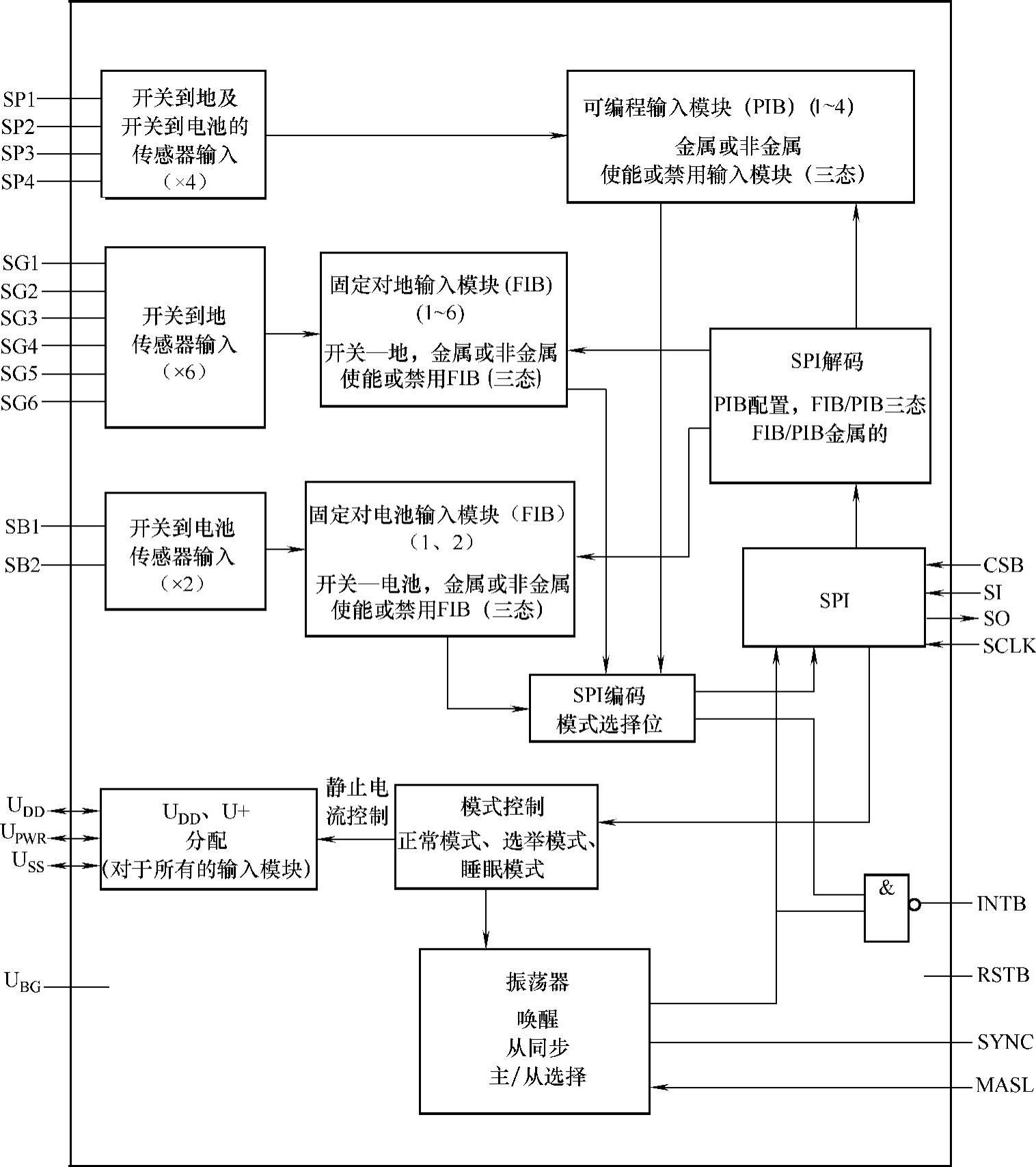
图4-11 MC33884内部框图
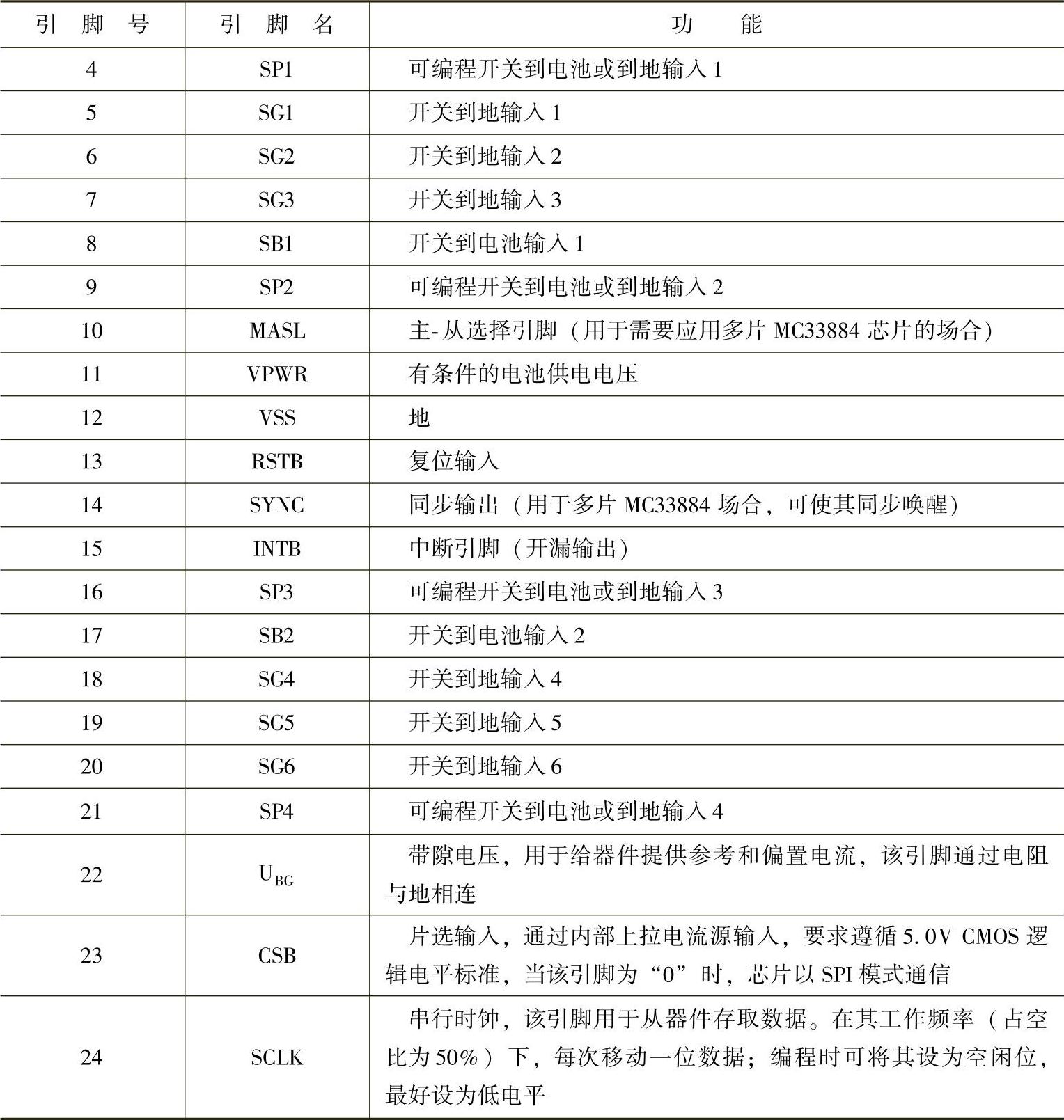
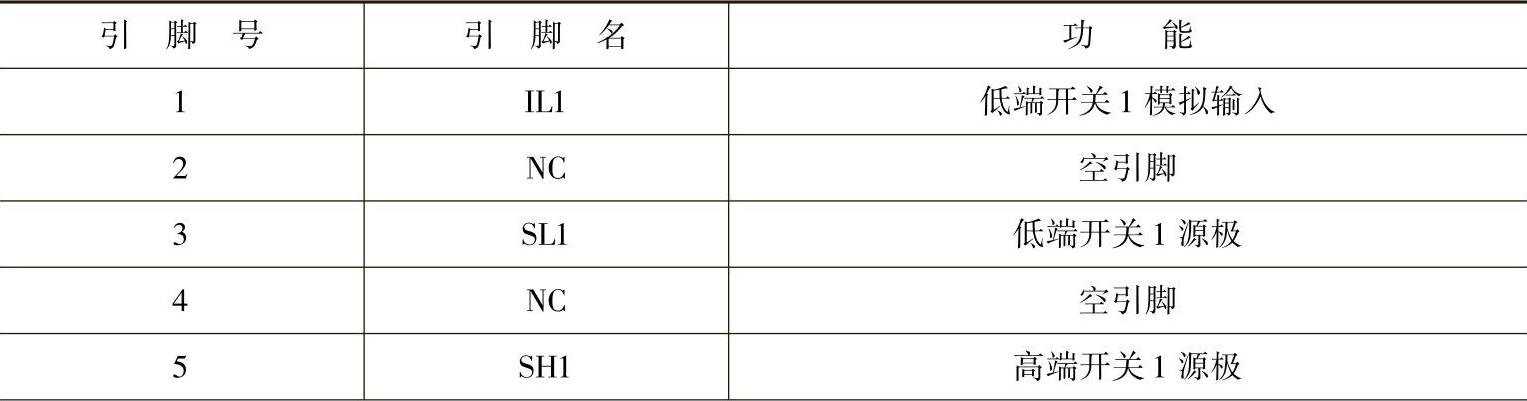
其各引脚功能见表4-2,图4-12是MC33884的典型应用电路。
表4-2 MC33884引脚功能描述

(续)
4.4.2.4 变速器控制器(TCU)输出驱动电路
具有电磁离合器的CVT控制器主要具有两个控制对象:一个是变速器的变速比电动机;另一个是变速器的电磁离合器。两个控制对象都通过微处理器的PWM信号来控制,用以控制变速器变速比电动机的电流大小和电磁离合器输入电流的大小,变速器变速比电动机的方向是通过微处理器I/O端口高低电平来控制的。
1.由MOSFET构成的变速比电动机驱动电路
图4-13为由MOSFET构成的变速器变速比电动机驱动控制电路。图中的核心部分是由VF1~VF4组成的“H”桥,用于对变速比电动机的正反转控制及调速控制。设VF1和VF4导通时,电动机M1为正转,那么当VF2和VF3导通时,电动机M1就为反转。图中,U1和U2为美国IR公司生产的IR2110型MOSFET驱动芯片,U1和U2分别用于驱动VF2、VF3和VF1、VF4。IR2110为具有高端和低端独立的高速MOSFET驱动电路。输入信号与CMOS和TTL电平兼容。图4-14所示为IR2110功能框图。从图中可以看出,IR2110主要由四部分组成,即输入部分、电平匹配部分、欠电压检测部分和输出驱动部分。输入部分由施密特触发器电路和或非门电路组成,其作用是对输入信号进行整形和逻辑处理,IR2110的逻辑输入信号有高端驱动输入信号HIN、低端驱动输入信号LIN和保护控制输入信号SD。当SD为低电平时,驱动输入信号有效。当SD为高电平时,IR2110停止驱动。因此SD信号通常与保护电路相连,当系统出现故障时,以触发的方式停止驱动。图4-15所示为IR2110的典型应用连接框图。图中C1、C2为并联在电源端的去耦电容,C3与VD1为自举电路,即高端驱动电路的电源产生电路。其工作原理是:当低端MOSFET导通而高端MOSFET关断时,Ucc通过VD1对C3充电,C3的电压可为高端MOSFET提供电源,随着高端MOSFET源极电位的上升,C3两端的电位同时随之提高,从而保证了高端MOSFET栅极对源极有足够高的电压。应用IR2110时应特别注意:由于采用外部自举原理,高端驱动信号不能用直流,且其工作频率不能低于100Hz。
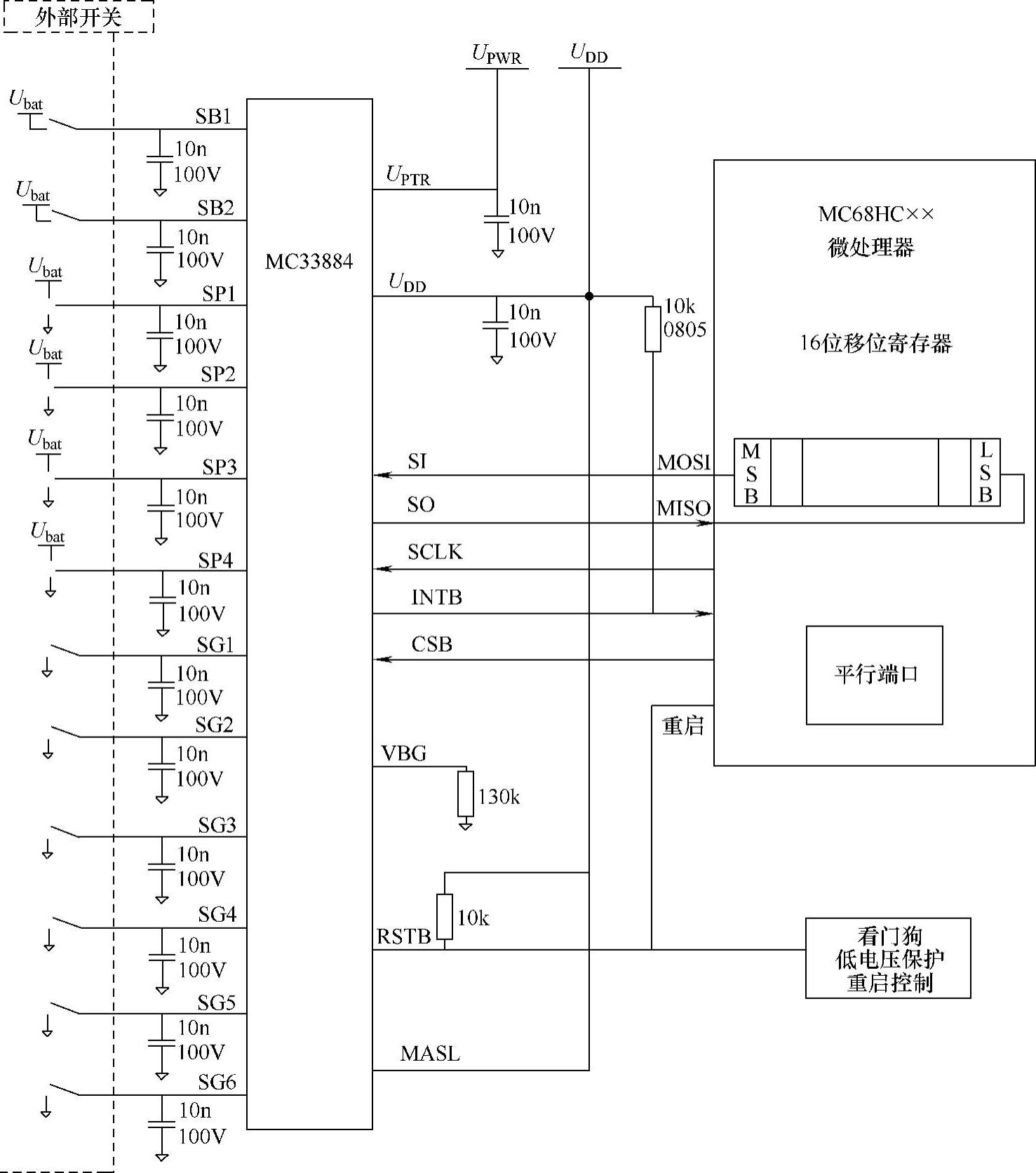
图4-12 MC33884典型应用电路
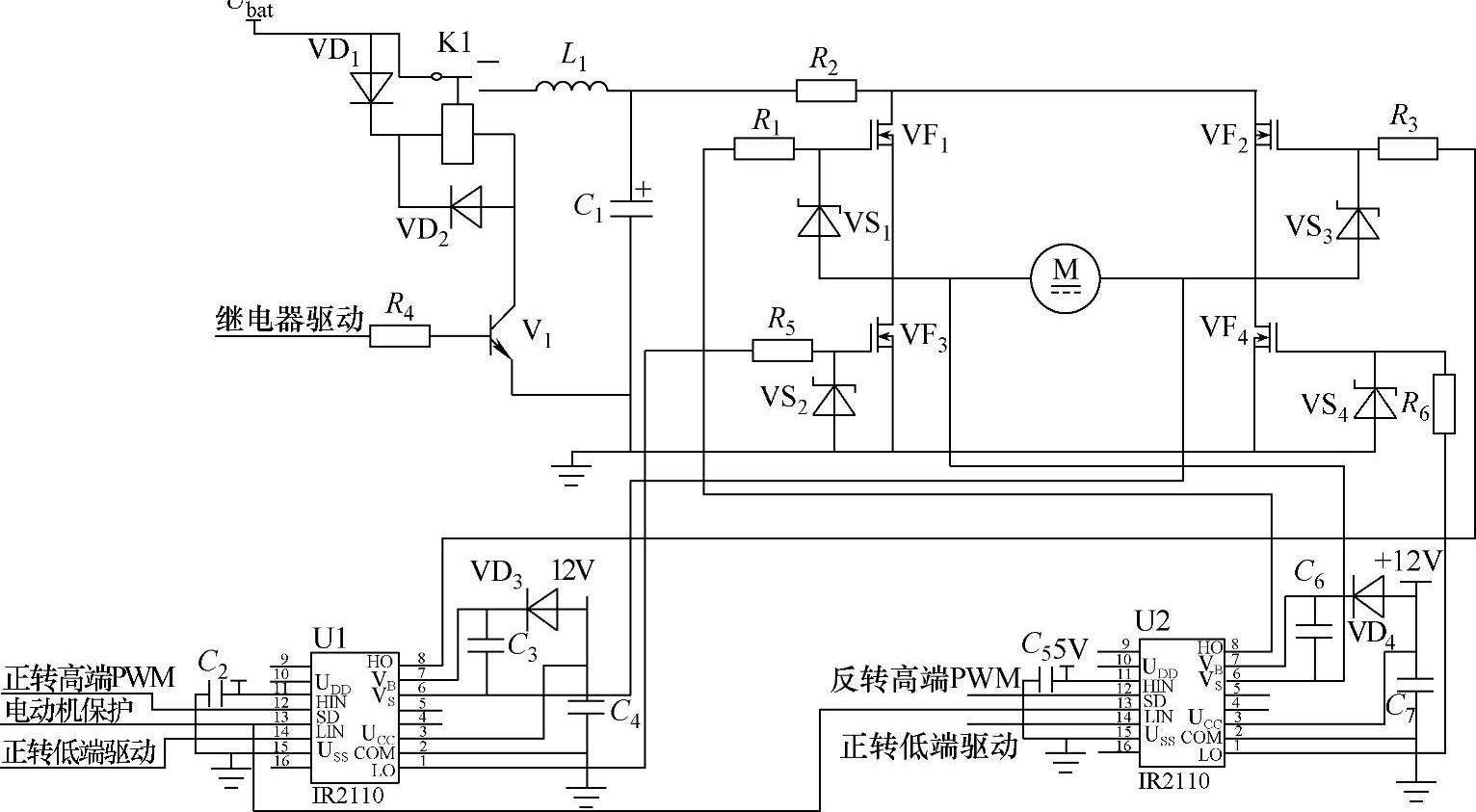
图4-13 变速器变速比电动机驱动控制电路(www.daowen.com)
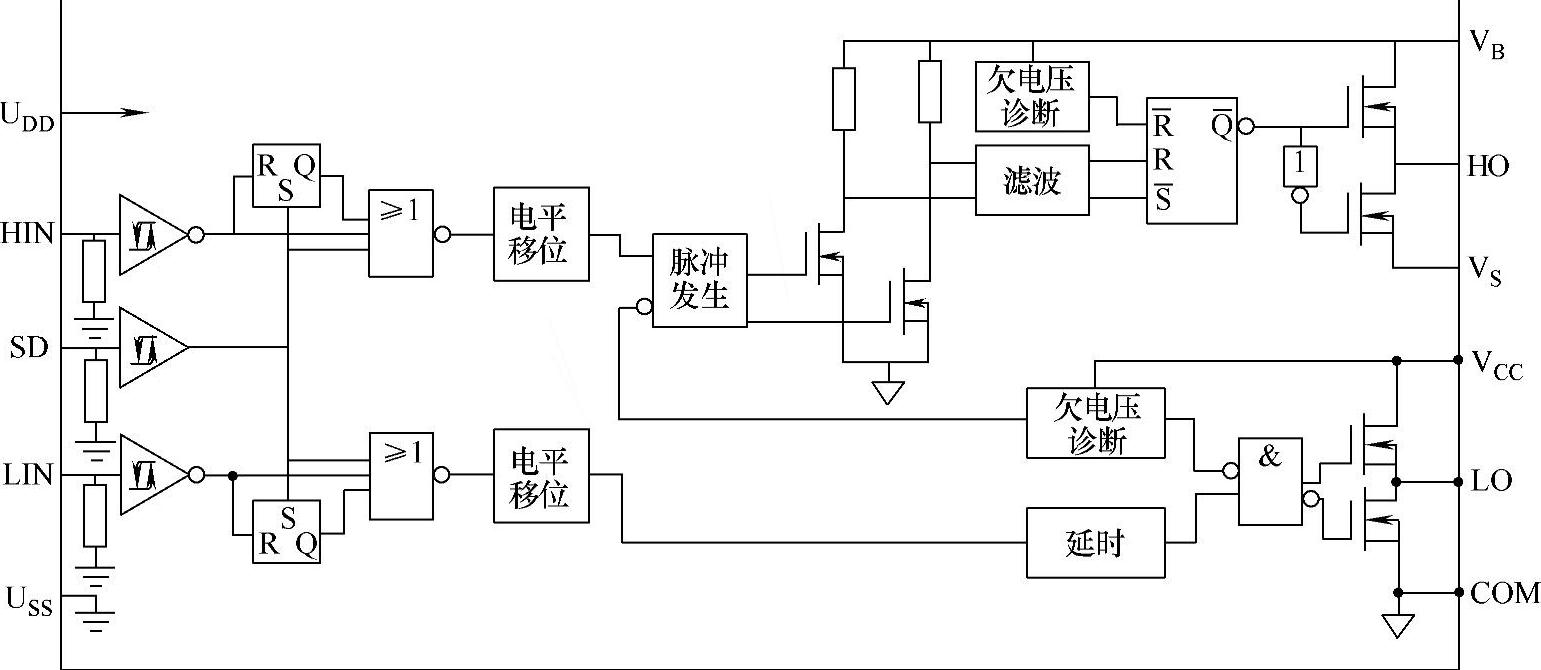
图4-14 IR2110功能框图
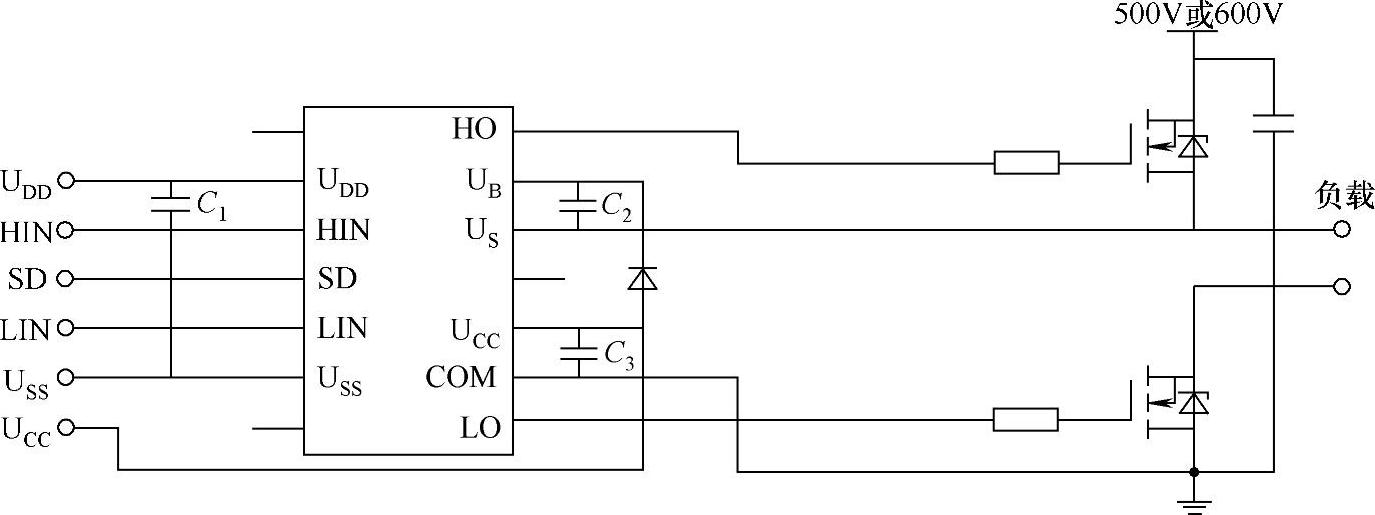
图4-15 IR2110典型应用连接框图
2.由智能驱动模块构成的变速比电动机驱动电路
BTS 7710 GP是功率驱动芯片,它有一个双高端驱动开关和两个低端驱动开关。它既可以用于H桥驱动,也可用于其他形式的驱动。该芯片的主要特性如下:
1)可自由设置为桥式开关或其他形式的开关;
2)特别适用于直流电动机的控制;
3)漏-源导通电阻RDSON低,高端驱动时为70mΩ,低端驱动时为40mΩ;
4)最大峰值电流为15A;
5)静态电流小,一般为0.5μA;
6)具有过载保护以及对地短路保护;
7)最高工作电压可达40V;
8)具有故障诊断功能;
9)具有内部钳位二极管;
10)源极绝缘,以检测外部电流
11)PWM频率可高达50KHz。
其原理框图如图4-16所示,引脚功能见表4-3。
表4-3 BTS7710GP引脚功能描述
(续)
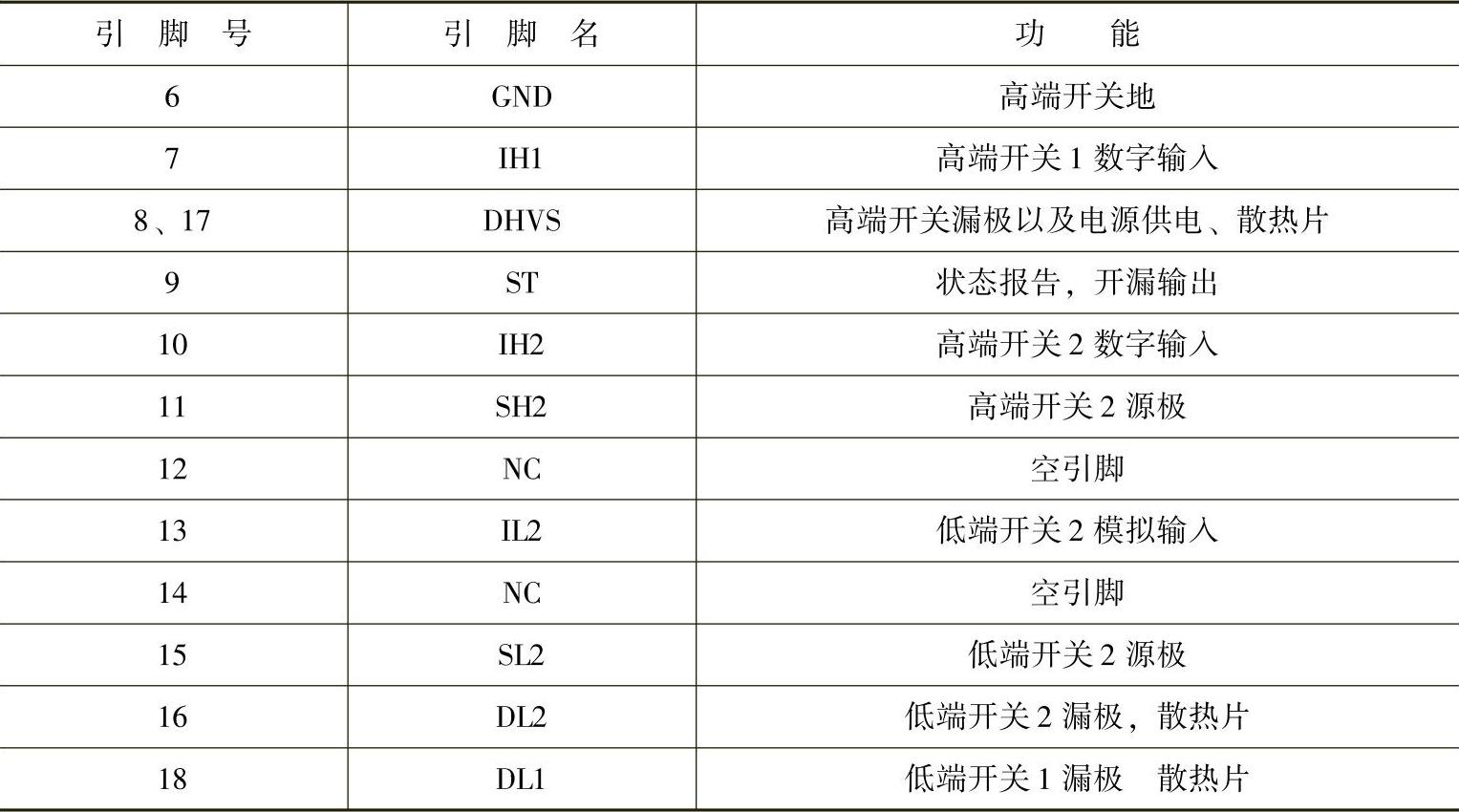
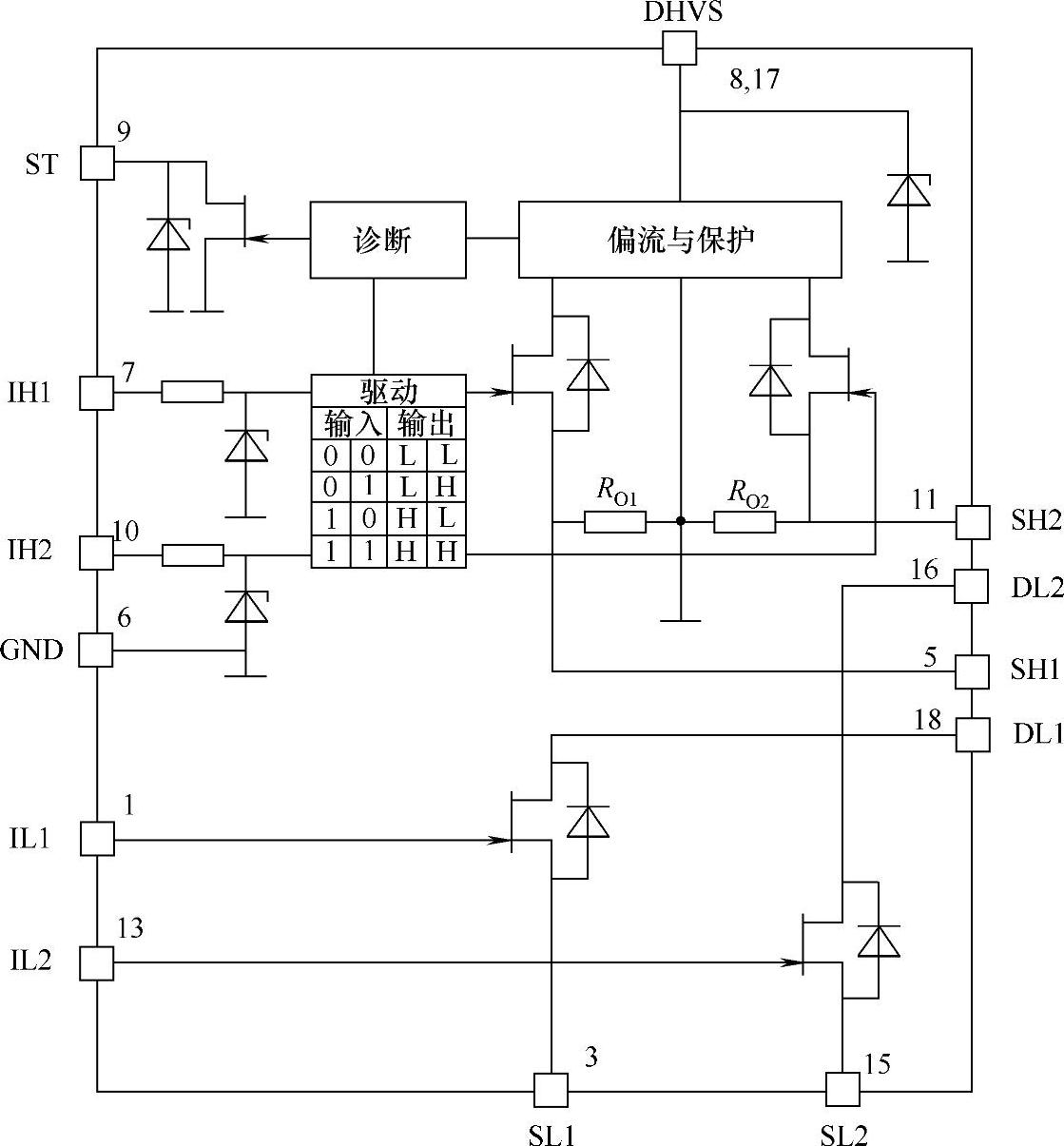
图4-16 BTS7710GP原理框图
电路描述
(1)输入电路 IH1和IH2输入控制端内置施密特触发器,兼容TTL/CMOS电平。它们驱动后级缓冲放大器,并调整逻辑信号,以驱动功率输出级。由于加入了钳位二极管,这些输入端都具有ESD保护功能。
IL1和IL2和标准的N沟道垂直结构电力MOS FET的栅极相连。
(2)输出级 输出级是由一个具有低导通电阻的功率MOS FET H桥组成,根据H桥电路的特点,在加感性负载时,D-MOS FET本体的二极管可实现快恢复整流。如果高端开关用于单开关使用时,在驱动感性负载的过程中,可能产生的正负电压峰值将受到内置二极管钳位。
(3)短路保护 输出具有以下两种保护功能:
1)输出对地短路保护;
2)过载保护。
器件内置了一个运算放大器,通过将漏-源电压与参考电压相比较判断电路状态,如果高端开关的发生过载,则其输出立即变为低电平。
(4)过热保护 在高端开关内设计了一个过热保护电路,一旦过热,即关断输出晶体管,来达到使输出变为低电平的目的。
(5)欠电压锁定 当US高于接通电压UUVON时,激活器件;反之,关断输出晶体管。
BTS7710的应用电路如图4-17所示。它的供电电源是由TLE4278构成。由图可以看出,BTS7710与微处理器的连接十分简单,但值得注意的是,如果被控的电动机需要调速,PWM信号只能加在低端的MOSFET上,这是因为低端MOS-FET的开关时间仅为25ns,而高端MOSFET的开关时间很慢,达75μs。
3.电磁离合器驱动电路
图4-18所示为电磁离合器驱动控制部分的主电路。图中省去了关于MOS- FET和晶体管的驱动电路。图中驱动对象为电磁离合器L1,驱动电路是由VF2、VF3、VF1和V1组成的“H”桥。VF2和VF3组成电磁离合器的正向励磁电路;VF1和V1组成反向去磁电路。在电磁离合器的正向励磁电路中,VF2的作用相当于开关,VF2导通,电磁离合器线圈A点接地,VF3、VD3、L2和C1组成了开关电源,B点的电压正比于VF3导通的占空比,即

式中 Ubat——汽车蓄电池的电压;
T——励磁电流PWM驱动控制信号的周期;
Ton——励磁电流PWM驱动控制信号在一个周期内高电平脉宽。
由此可见只要通过调整Ton的脉宽即可调节电容C1两端的电压。在VF2导通的情况下,C1两端的电压即为加到电磁离合器两端的电压。由于电磁离合器在稳定状态下其电阻主要是由电磁离合器励磁线圈的电阻决定的,为常数,因此通过调节VF3驱动信号的占空比便可调节电磁离合器的电流,即电磁离合器的输出转矩。
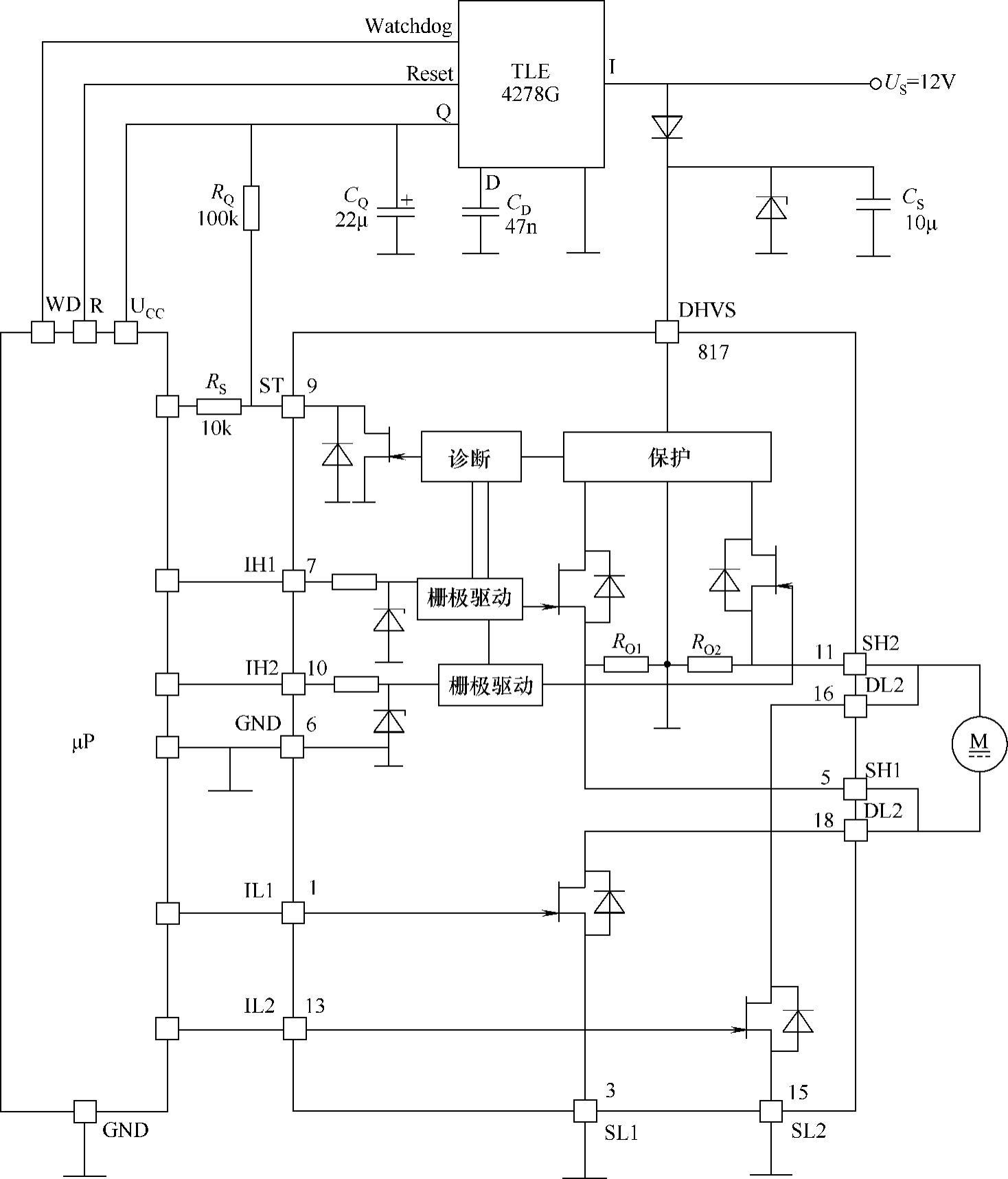
图4-17 电动机的驱动应用电路
由于电磁离合器存在剩磁现象,即在励磁电流为零的情况下,电磁离合器的输出转矩并不为零。因此必须对电磁离合器实施反向励磁才能使其输出转矩为零。图4-18中VF1、V1、R9、VS2和R8组成了反向恒流去磁电路。在VF3和VF2关断的情况下,VF1和V1导通,电磁离合器将流过反向电流即去磁电流,去磁电流的大小由VS2和R9决定,当去磁低端驱动信号为高电平时,R8与VS2构成了稳压电路,V1基极上的电位为VS2的稳压值UVS2。在粗略计算的情况下晶体管基极对发射极的电压可取0.7V,流过V1发射极的电流为
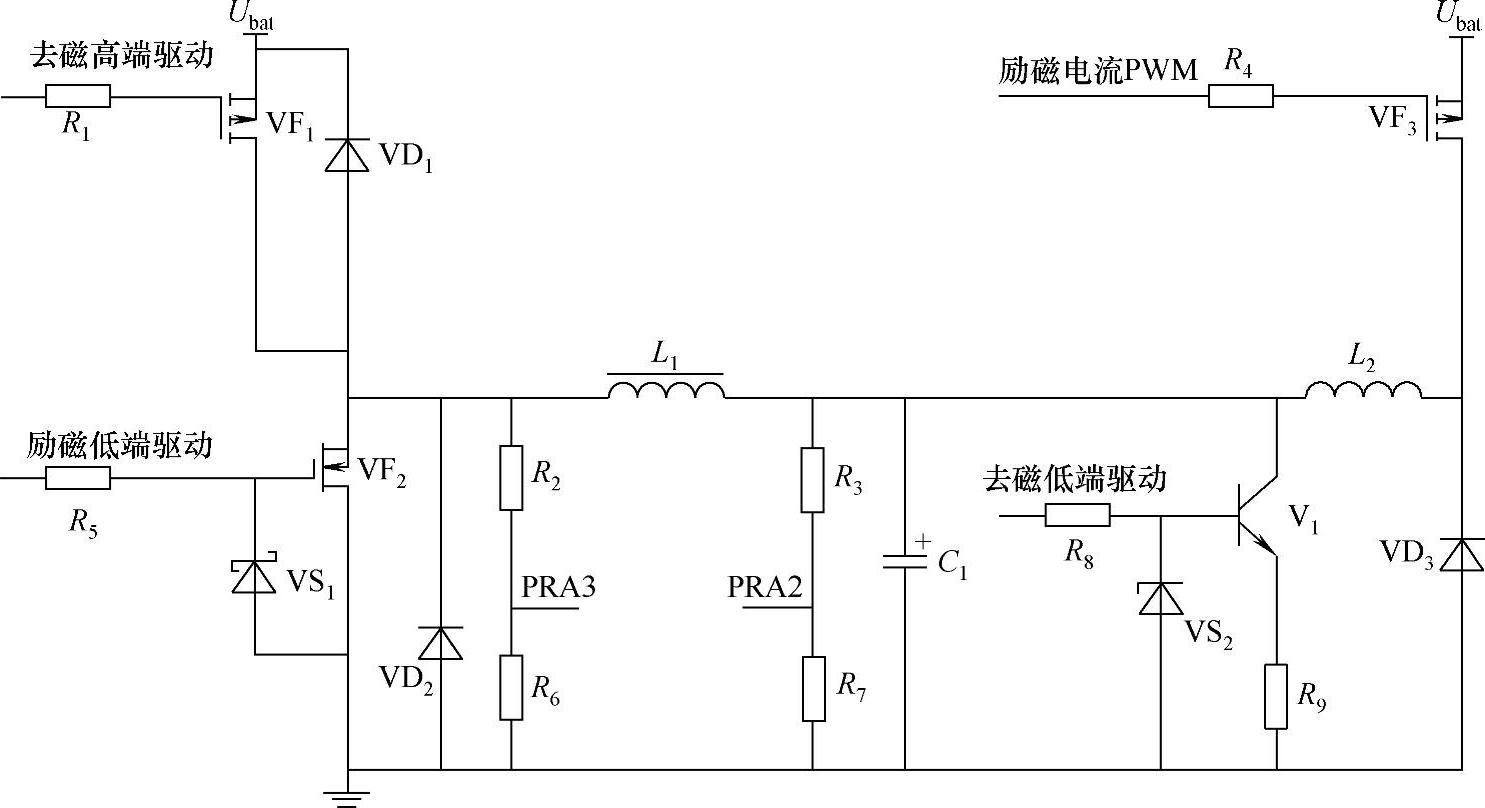
图4-18 电磁离合器驱动主电路

如果忽略V1基极的电流,Ie即为电磁离合器线圈的反向去磁电流,因此通过调整R9即可方便地调整电磁离合器线圈的反向去磁电流。
图中R2、R6和R3、R7为分压电路,用于检测电磁离合器两端的电压。
4.4.2.5 变速器控制单元(TCU)电源电路
汽车电子装置中的微处理器对电源的要求特别高,电源的质量和性能直接影响汽车电子装置的可靠性,通常情况下,汽车电子装置中的微处理器的电源不用普通的三端电源,而是根据具体情况采用专用的线性电源和开关电源。
1.线性电源
汽车电子装置中现有功率电源一般多采用线性电源,适合于汽车的线性电源种类很多,TLE4275的特点是工作电压范围宽,压降低,而且具有很宽的温度范围。
TLE4275是一个单片集成低压降电压调节器,封装采用5引脚贴片封装。其输出为5(1±2%)V,输入电压最低可为5.5V,最高可达45V。此芯片能提供的负载电流最高可达450mA,且具有负载短路保护功能。芯片同时具有过热保护功能,当芯片温度超过预定的温度,芯片将停止工作。芯片可以对外产生一个复位信号,其典型值是4.65V,它的延迟时间可通过外接电容进行调节。
除此之外,还具有低的耗散电流、上电及欠电压复位、短路保护功能、极性反接保护功能等,的ESD电压不小于4kV。
图4-19为TLE4275功能框图,图4-20为应用电路。
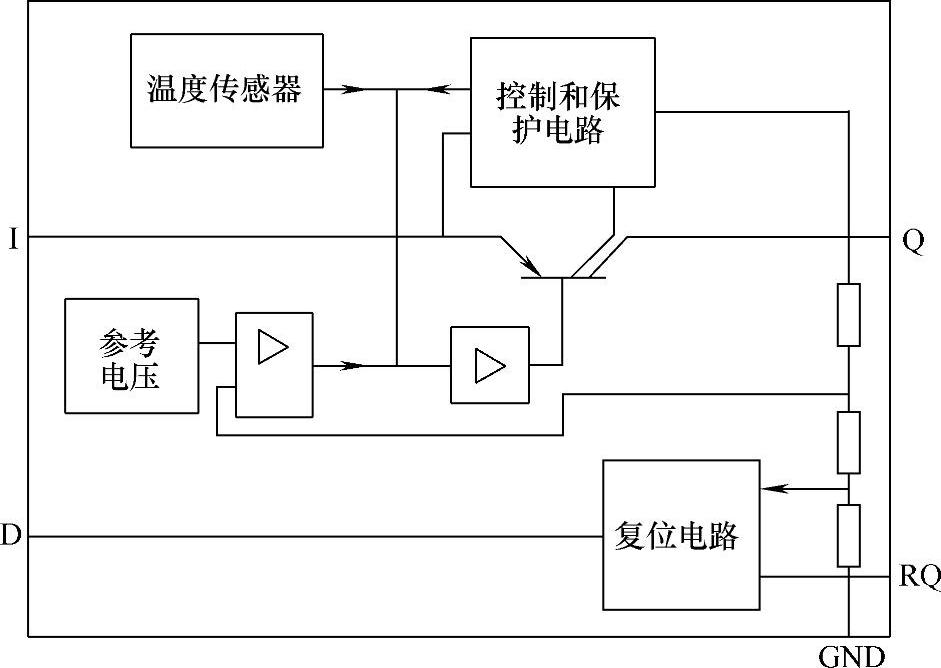
图4-19 TLE4275功能框图
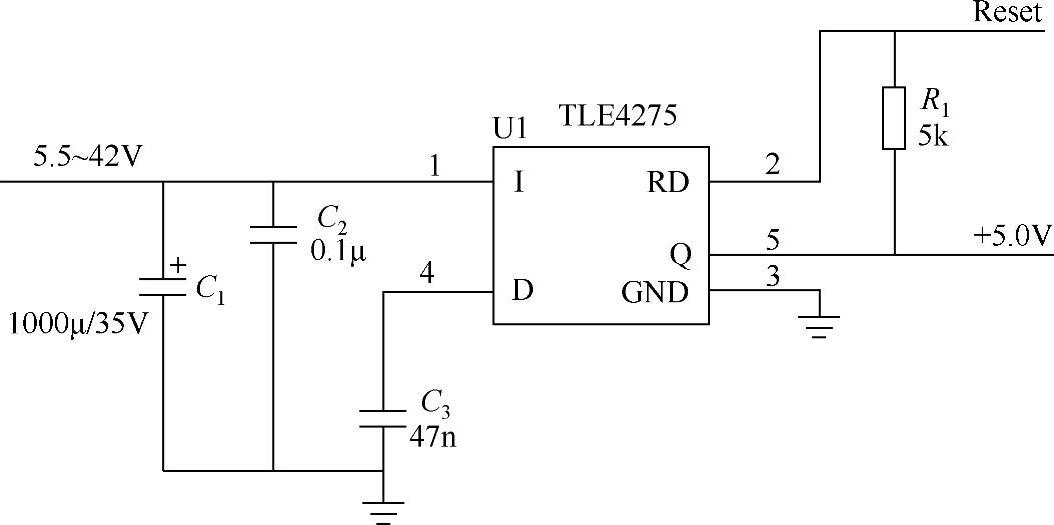
图4-20 TLE4275应用电路
2.开关电源MC33997
(1)概述 MC33997是中功率、多输出的电源芯片,它的工作电压范围宽,从6.0~26.5V均能工作,可承受40V瞬态电压。它是阶梯下降式开关型前置稳压器,直接输出5V、3.3V两路电源,同时还具有两路5.00V精密电源输出,内部有低阻抗的LDMOS(横向扩散金属氧化物半导体)保护,一路3.3V线性备用电源。3.3V线形调压输出端可外接一个通态晶体管,以降低功耗。主电源输出和精密电源输出可以通过两个独立的使能引脚控制。可为各种高级微处理器供电,适合于为汽车中的微处理器和传感器供电。图4-21为MC33997的功能框图。
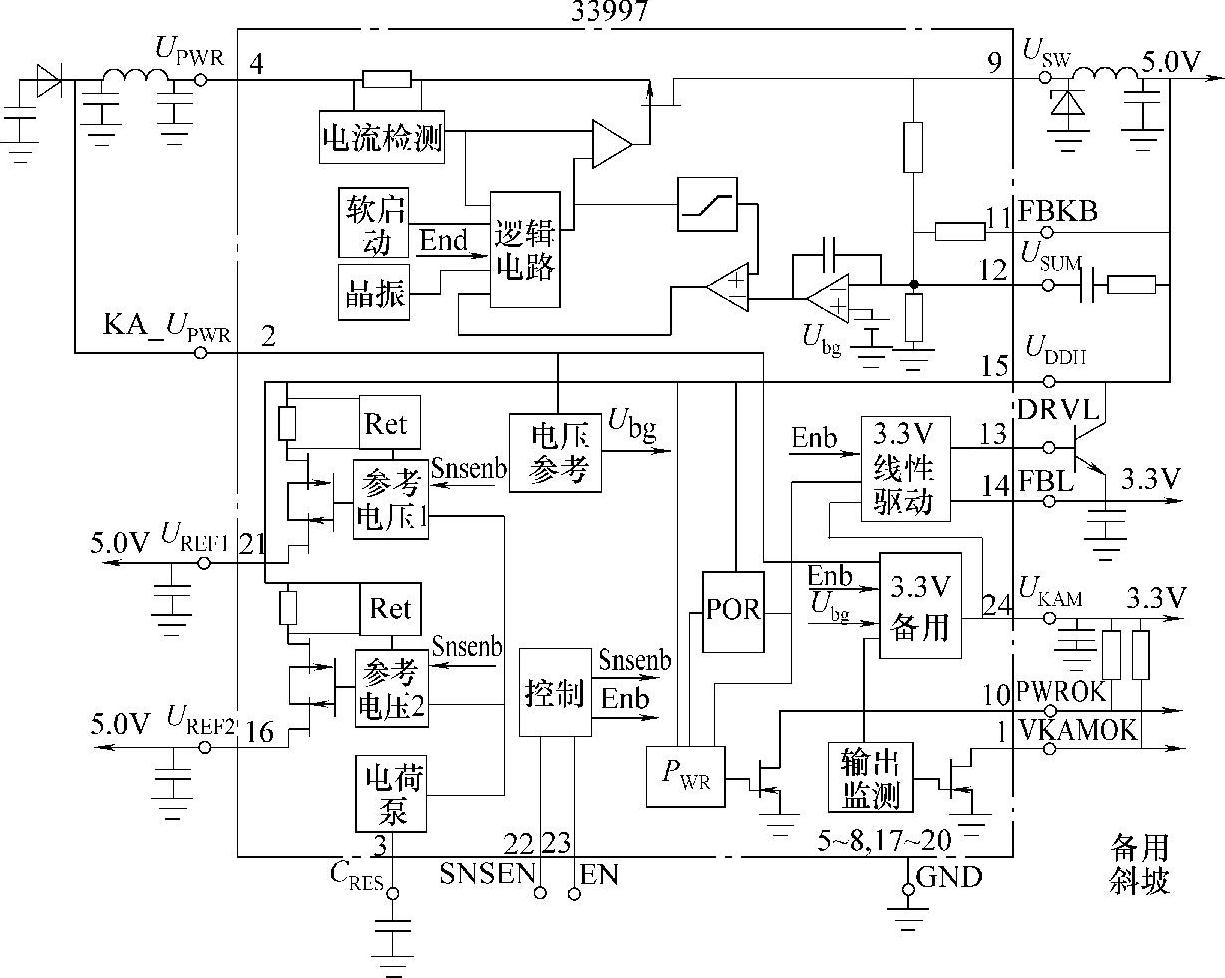
图4-21 MC33997功能框图
具体地说,MC33997具有以下特点:
1)工作电压范围:6.0~26.5V能承受的瞬时电压可达40V;
2)阶梯下降式开关调节器输出电压5.0V,输出总电流可达1400mA,通过外部晶体管调节,线性调节器输出电压3.3V,输出电流400mA;
3)低功耗备用线性调节器UKAM=3.3V,输出电流10mA;
4)两路5V精密电源,输出电流200mA,参考电压UREF同时具有对电源和地短路保护,还可以复位后再次输出;
5)对于欠电压关断具有恢复能力;
6)复位信号;
7)上电延迟;
8)具有主电源使能引脚(EN)、精密电源使能引脚(SNSEN);
(2)引脚介绍 MC33997的引脚功能见表4-4。
表4-4 MC33997引脚功能描述
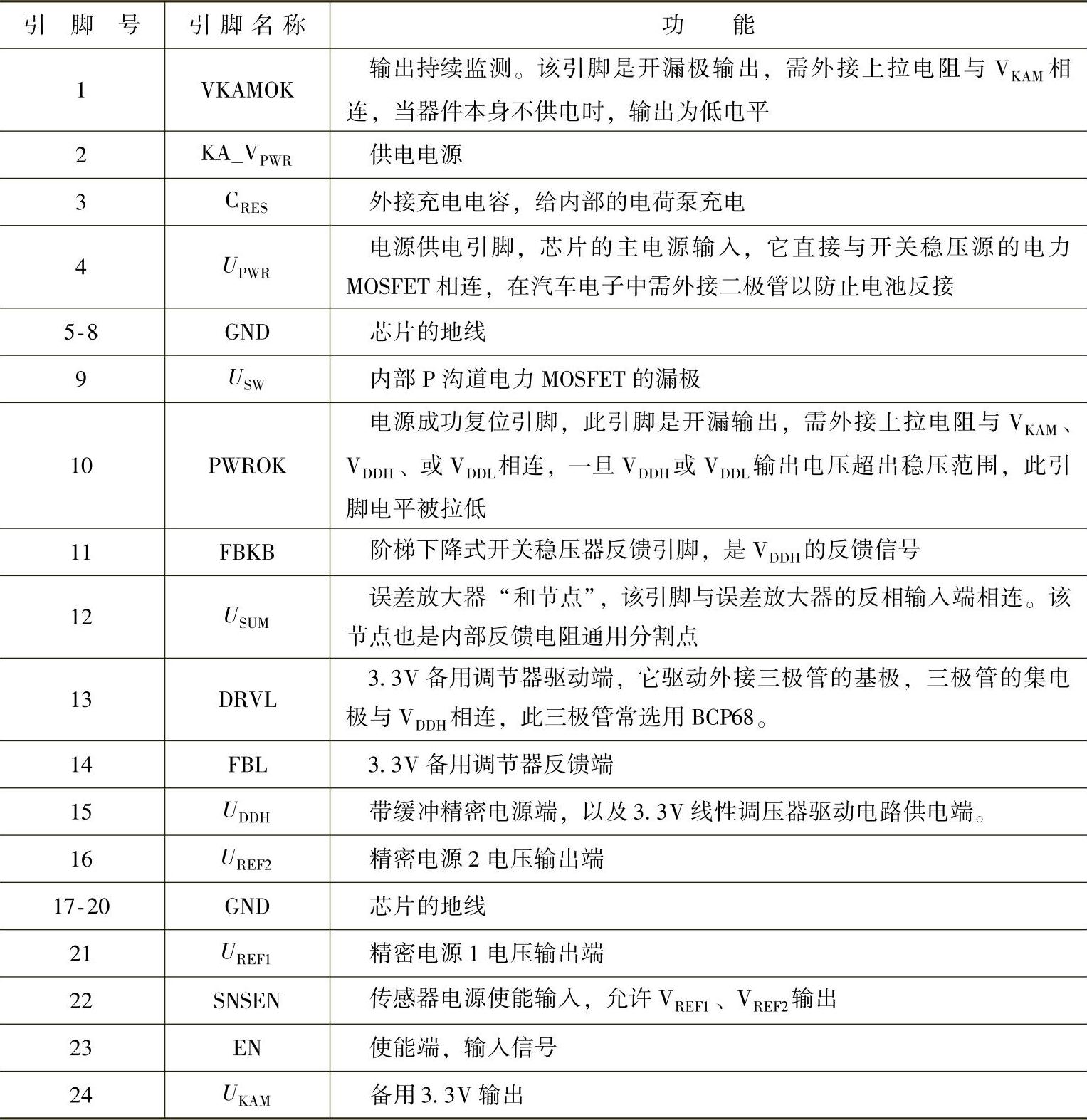
(3)功能引脚说明
1)VDDH开关稳压器输出。开关稳压器是一个传统的高频(750kHz)斩波器,内部集成高端P沟道功率MOSFET。其输出电压为5.0V,精度为±2%,它可以直接驱动各种电子控制单元(ECM)的模拟电路和数字电路。其总的输出额定电流为1.4A,该电流又可转换为线性稳压器的3.3V输出和精密电源VREF1、VREF2输出。MC33997还具有软启动功能,即器件使能之后,输出电压VDDH迅速上升到额定值的一半,然后再以16次逐步达到额定电压(一般为5V)。
2)VDDL线性稳压器输出。3.3V线性电压调节器的输入是5.0V开关电源的输出。其输出电源通道使用了一个常通晶体管,这样一来,整个芯片的功耗就有所减小。FBL引脚是调节器控制环的反馈输入,DRVL引脚是外部常通晶体管的基极。上电保护、掉电保护以及故障管理都和5.0V开关电源协同工作。
3)VREF1、VREF2精密电源。精密电源是通过5.0V主输出加一个保护开关实现的。33997内部有两个低阻LDMOS管与开关调节器的输出相连,还有短路保护电路(对电源短路保护和对地短路保护)。一旦监测到发生严重的故障,将切断输出,而精密电源二次供电定时器开始计时,如果溢出,精密电源将再次输出电源。
VREF1、VREF2可能发生的严重故障是指其对电源或对地的硬件短路影响开关调节输出。对电源短路超过17V被称为是“双故障”,但是这两个输出引脚都具有保护电路。短路对输出的影响程度取决于开关调节输出电容的容量及其ESR值。
4)VKAM备用电源输出。备用电源是指在芯片掉电时还能为其提供电源,正常工作,就像非易失性的SRAM一样。芯片内有掉电定时器、控制器、按键开关监测电路。它能给其小电流电路掉电的情况下供电。输出电压一般为3.3V,如果发生故障,就将VKAMOK引脚电平拉低,以启动备用电源。
当EN引脚电平为低时,调节器将自动进入低电流备用模式,为了减小KA_VPWR和VPWR两个引脚的拉电流,除了VKAM和EN,其所有供电功能将失效,后者用于检测唤醒信号。
5)上电延迟定时器。上电延迟定时器集成在芯片的控制电路当中,一个定时器监测VPWR引脚的输入电压,另一个监测KA_VPWR引脚的输入电压。这两个引脚的输入电压需持续足够长的时间,直至定时器溢出才能使能调节器,输出相应的电压。
6)故障挂起定时器。如果VDDL输出电压在软启动周期结束之后没达到额定值,也或者VDDH、VDDL输出电压低于PWROK的门限,则故障挂起定时器关闭调节器的输出,同时启动定时器,直到定时器计数满,调节器再次上电。
7)上电复位定时器。如果VDDH、VDDL输出正常,那么在软启动周期结束,该定时器溢出,此时开漏极输出的PWROK信号被清除,标志器件已正常上电。
8)PWROK、VKAMOK—芯片工况监督引脚。MC33997有两个用于监测的开漏极输出引脚:PWROK、VKAMOK,PWROK是低电平有效,即当VDDH、VDDL任何一个输出低于额定调节值时,该引脚将被拉低。如果它们两个都低于各自的额定值,且上电复位定时器计数满,那么输出驱动器将失效,同时此引脚呈高阻状态。VKAMOK用于监测VKAM的状态,它将VKAM的输出与内部参考电压相比,若低于参考电压,那么就将该引脚电平拉低。
(4)MC33997应用电路 图4-22是应用MC33997构成的典型电源电路。各部分实现的功能如前文所述,在此不作详细介绍。
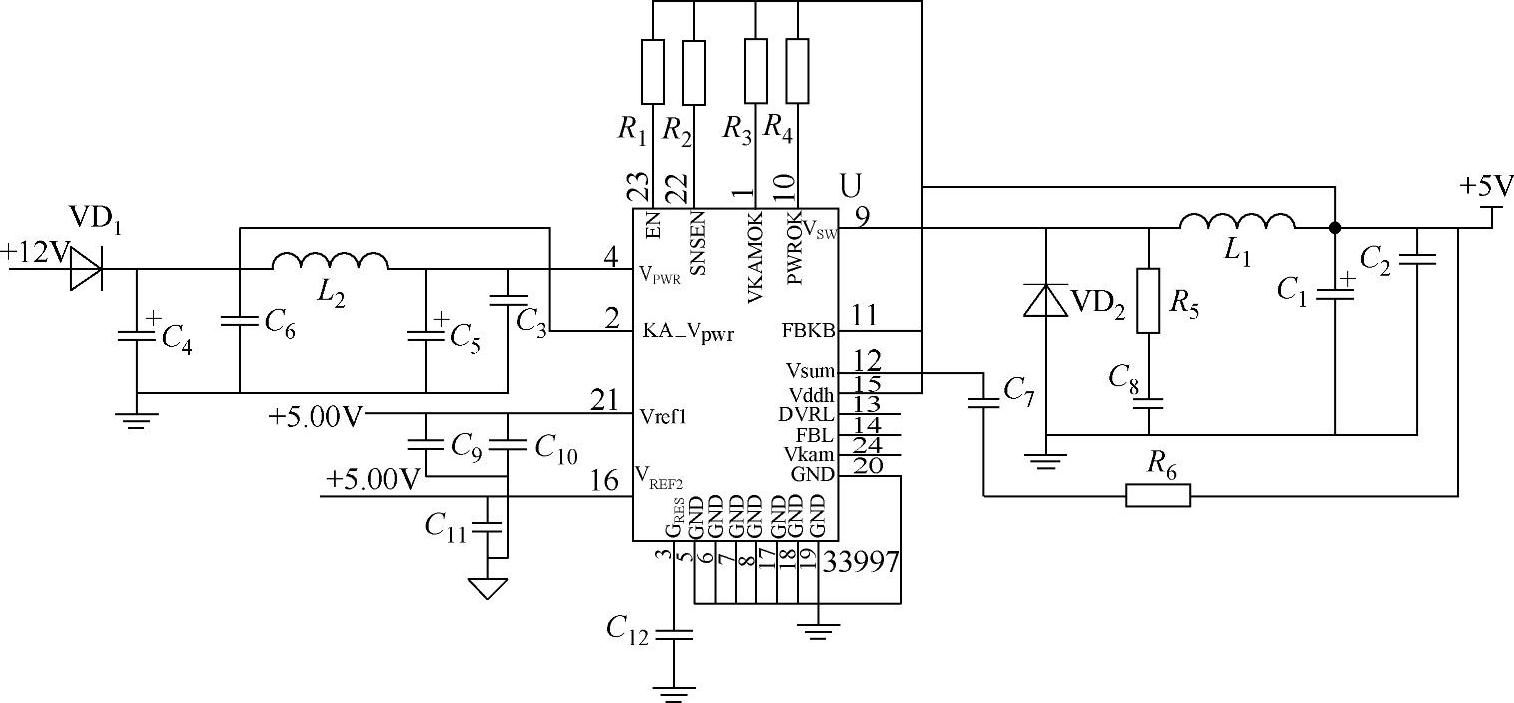
图4-22 MC33997的应用电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





