IRAMS10UP60A是美国IR公司新近推出的一款特殊的智能功率模块。该模块是为洗衣机和电冰箱等家用电器的电动机控制而开发和优化的。内置了温度监视、过温/过电流保护及具有短路能力的IGBT和欠电压锁定功能,提供了高水平的故障保护功能,该模块还集成了高压侧驱动器所需的自举二极管,以及为驱动内部电路的单极性电源,简化了模块的使用,并大大降低了成本。
本节主要介绍功率模块IRAMS10UP60A在无刷直流电动机的闭环速度调节控制系统中的应用。
基于功率模块IRAMS10UP60A的无刷直流电动机闭环速度调节控制系统原理框图如图3-38所示。本控制系统由纯硬件电路来完成,下面主要介绍系统的基本原理和系统中的一些主要硬件电路。
在本系统中,MC33035构成主控电路,MC33039构成电子测速器,IRAMS10UP60A构成功率电路,电机本体的三相绕组为 联结逆变桥电路工作在全控桥两两通电方式。
联结逆变桥电路工作在全控桥两两通电方式。
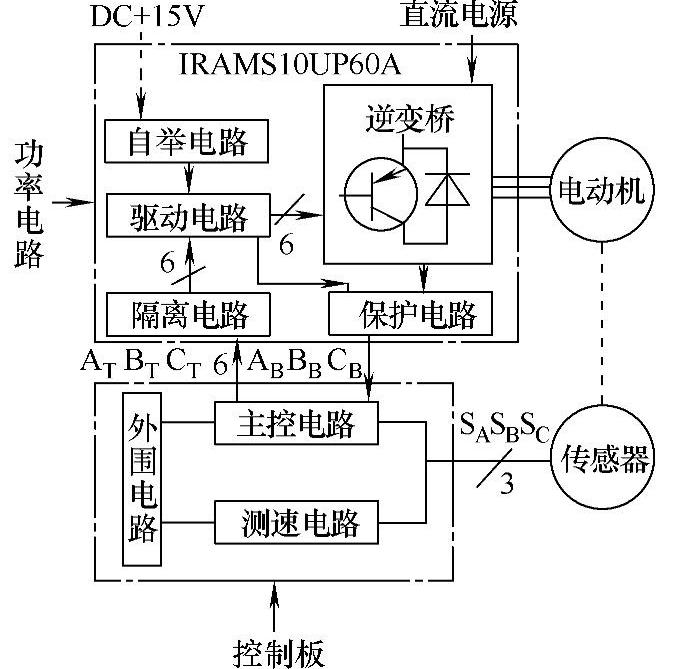
图3-38 系统原理框图
3.4.2.1 系统的基本原理
电动机转子位置检测器送来的三相位置检测信号(SA、SB、SC)一方面送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态经过运算后产生逆变器三相上、下桥臂开关器件的6路原始控制信号,其中三相下桥开关信号还要按无刷直流电动机调速机理进行脉宽调制处理。处理后的三相下桥PWM控制信号(AB,BB,CB)和三相上桥控制信号(AT,BT,CT)送入功率模块IRAMS10UP60A,经过驱动电路整形、放大后,施加到逆变器6个开关管上,使其产生供电动机正常运行所需的三相方波电流。
另一方面,转子位置检测信号还送入MC33039,经f/U转换,得到一个频率与电动机转速成正比的脉冲信号,脉冲信号通过简单的阻容网络滤波后形成转速反馈信号,利用MC33035中的误差放大器即可构成一个简单的P调节器,实现电动机转速的闭环控制,以提高电动机的机械特性硬度。根据控制系统的精度要求,还可外接各种PI、PD调节电路,以实现更为复杂的闭环调节控制。
3.4.2.2 脉宽调制PWM
MC33035的内部电路和外围电路一起产生闭环脉宽调制信号PWM,进而控制电动机的转矩和转速。这是闭环速度调节控制系统的关键电路,具体电路如图3-39所示。
PWM信号的频率可以通过外部电路调节,其频率由公式1/(2πR2C2)决定,只要将R2换成一个可变电阻,通过调节R2即可改变PWM信号的频率。每个周期内基准电压6.24V(8脚)经R2向C2充电,然后C2上的电荷通过内部一晶体管迅速放电,形成锯齿波振荡信号。其波蜂和波谷分别是4.1V和1.5V,所以10引脚的输入近似一个三角波,其频率由上述公式决定。R20为控制无刷电动机转速的电位器。误差放大器1由外部接成一个增益为10的放大器,MC33039的输出经低通滤波器平滑,引入MC33035的误差放大器1的反相输入端12管脚,而转速给定信号输入MC33035的误差放大器1的同相输入端11管脚,误差放大器输出与振荡器输出锯齿波信号比较后,产生脉宽调制(PWM)信号,控制3个下侧驱动输出,改变输出脉冲宽度,相当于改变供给电动机绕组的平均电压,从而控制其转速。脉宽调制时序如图3-40所示。
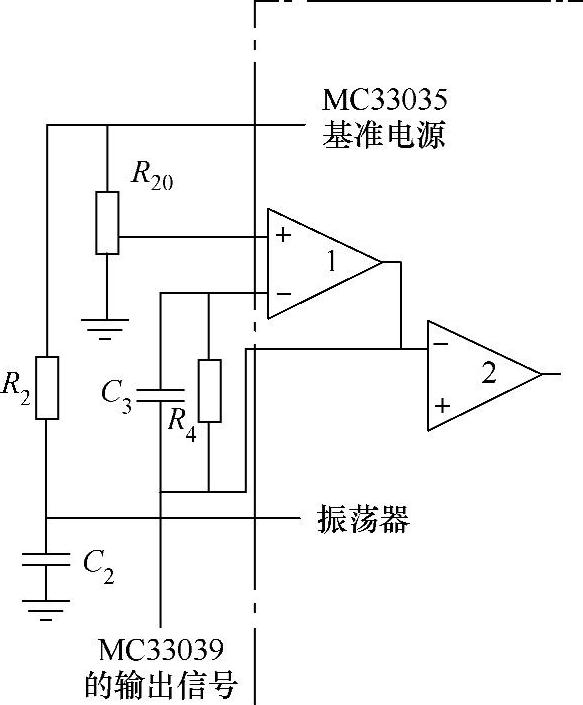
图3-39 脉宽调制电路
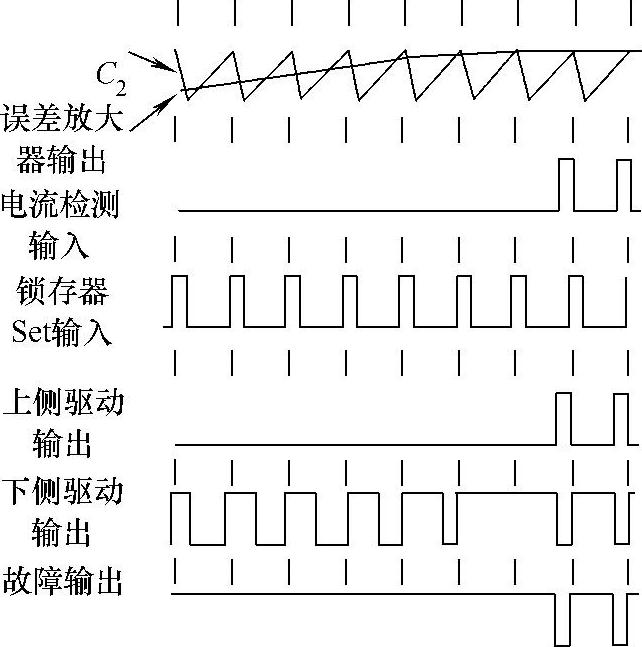
图3-40 脉宽调制时序图
3.4.2.3 智能功率驱动(https://www.daowen.com)
功率驱动部分是控制系统的一个重要组成部分,智能功率模块IRAMS10UP60A内部集成了多种功能电路,大大地简化了系统硬件电路,而且同分离元件组成的功率驱动电路相比,它的安全性、稳定性和可靠性都要更好。
功率模块的最大额定功率为750W,可通过改变提供给它直流母线正输入端的电压值,来改变它的最大驱动功率,满足不同小功率电动机的控制需要。
模块的自举电路和过温/过电流保护电路需要外围电路协同工作,其他电路都为内置电路,下面主要说明由内外部电路一起实现的自举电路和过温/过电流保护电路,这是该模块正常使用的关键,也是保证闭环速度调节控制系统功能实现的重要电路。
1.自举电路
对于每个给高端IGBT提供门极的3个高端电路,高端和低端驱动器需要1个浮动的电源供电,自举电路是一种非常方便地获得浮动电源的方法,图3-41给出了三相开关逆变器驱动电路的其中一相的实现方法,并在下面阐述自举工作的原理,该电路适用于每一相。
低端IGBT导通时,自举电容Cbs(外置)通过自举二极管VDbs、电阻Rbs和低端开关V2进行充电,因为V7的发射极接近地电位,自举电容Cbs上的充电电压接近15V。当低端开关断开时,V2的发射极电位上升,由于自举电容Cbs上的充电电压接近15V,因而自举二极管VDbs反向截止,自举电容Cbs上的电压为V7提供静态电压,对输入的开关脉冲信号进行放大。
在使用这个模块时,首先要看3个外加的自举电容是否都能正常充电,这是自举电路正常工作的关键。自举电路的功能保证了功率部分可以由单电源供电,这大大地简化了硬件电路,增加了功率部分的安全性。
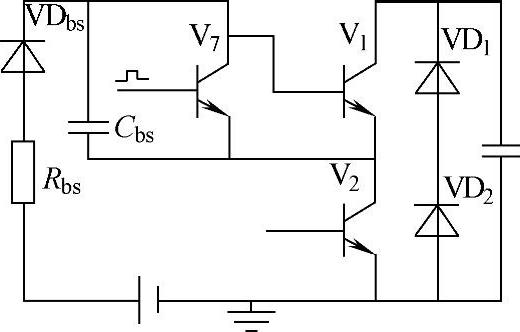
图3-41 自举电路
2.过温/过电流保护电路
图3-42为内外电路构成的过温/过电流保护电路,21脚有双重功能;输入引脚为过电流触发,热敏电阻所感应出的模拟温度信号是输出引脚。RNTC为热敏电阻,过温电路一直有效,过流控制晶体管是常开的。
正常时,21脚加5V输入;过温时,21脚自动从5V下降,外控器工作;过电流时,过电流控制晶体管工作,集电极为0V,21脚无外电源工作,电压自动下降,外控器工作。
过温/过电流保护电路避免了功率模块因温度过高或电流过大而引起的故障。
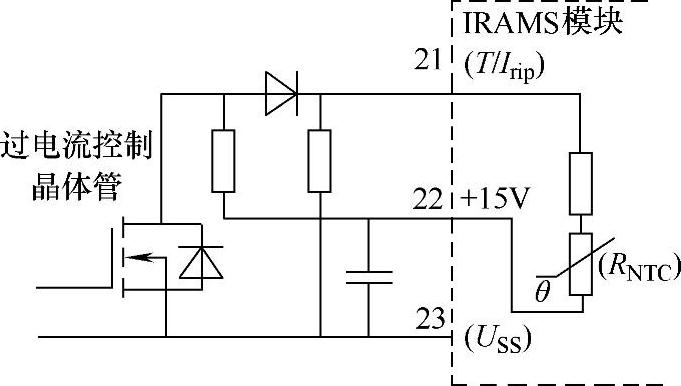
图3-42 过温/过电流保护电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





