电子气门系统在很大程度上执行节气门的功能。它由电子气门控制单元、电子气门控制电动机、电子气门控制传动机构和偏心轴传感器等部件组成,而电子气门控制单元又由带偏心轴的轴承支座、带止动弹簧的中间杠杆、摇臂和进气凸轮轴组成。在进气门打开情况下进气量是通过调节气门升程来完成的,这样就能确定最佳的气缸进气量。为此需要使用一种全可变气门升程控制装置。全可变气门升程控制通过气门机构内的其他部件实现。其示意图如图3-1所示,基本结构如图3-2所示,主要由伺服电动机、偏心轴、中间推杆和扭转弹簧等组成。

图3-1 电子气门系统示意图
1—伺服电动机 2—扭转弹簧 3—蜗杆 4—蜗轮 5—偏心轴 6—中间推杆 7—进气凸轮轴 8—斜台 9—滚子式气门压杆 10、15—液压气门间隙补偿器(HVA) 11—气门弹簧 12—进气门 13—排气门 14—气门弹簧 16—滚子式气门压杆 17—排气凸轮轴
伺服电动机布置在凸轮轴上方,用于调节偏心轴。伺服电动机的蜗杆嵌入安装在偏心轴上的蜗轮内。进行调节后无须特别锁止偏心轴,因为蜗杆传动机构具有足够的自锁能力。
偏心轴扭转可使固定架上的中间推杆朝进气凸轮轴方向移动。但由于中间推杆也靠在进气凸轮轴上,滚子式气门压杆相对中间推杆的位置会发生变化。中间推杆的斜台朝排气凸轮轴方向移动。
凸轮轴旋转和凸轮向中间推杆移动使中间推杆上的斜台发挥作用。斜台推动滚子式气门压杆,从而使进气门继续向下移动。进气门因此继续开启。

图3-2 电子气门系统的基本结构
1—伺服电动机 2—蜗杆 3—扭转弹簧 4—固定架 5—进气凸轮轴 6—斜台 7、11—HVA 8—进气门 9—排气门 10、12—滚子式气门压杆 13—中间推杆
14—偏心轴 15—蜗轮 16—排气凸轮轴
中间推杆改变凸轮轴与滚子式气门压杆之间的传动比。在全负荷位置时,气门升程和持续开启时间达到最大值。在怠速位置时,气门升程和持续开启时间达到最小值。
为了对部件进行分级,必须精确测量部件。根据测量结果为部件分级并将等级参数标记在部件上。这样可使一个发动机所有中间推杆的运行曲线公差都保持在7μm以内。也就是说,处于安装状态时气门机构部件的所有公差之和保持在0.02mm以内。
VALVETRONIC的调节范围:气门升程为0.3~9.7mm,在300ms内由最小气门升程调节至最大气门升程。偏心轴在此过程中扭转170°。
进气门(气门升程和气门关闭时刻)通过VALVETRONIC来控制,从而使“进气门关闭”时燃烧室内到达理想的混合气质量。随后在封闭气缸内的进一步膨胀和接下来的压缩过程几乎都不会产生能量损耗。与此相关的换气优势随着负荷的增大而不断减弱。全负荷时换气优势为零。负荷较小时开启时间必须非常短,这一点只有通过大比例减小气门升程才能实现。这样会使气门开启横截面减小,从而出现明显不利的节流作用。但是气门间隙处的进气速度由约50m/s提高至300m/s以上,而且气流围绕整个气门均匀流动。这种作用有助于实现最佳的混合气形成过程。
气门升程较小时气流围绕气门均匀流动,因此混合气在燃烧室内的分布情况非常好。由于进气速度非常高且气门间隙内的压力差非常大,油滴尺寸减小。这样可以达到很好的混合气形成效果并减小功率输出波动以及HC和NOx的排放量。
尤其在负荷较低时,可明显感觉到没有节流作用。耗油量最多可减少20%。负荷越高,节油潜力越低。以理想配比的空燃比(λ=1)运行时,平均可节省燃油约10%。全负荷时VALVETRONIC没有任何优势,因为全负荷时会达到最大气门升程,传统发动机的进气门会完全打开。
电子控制气门的安装位置如图3-3所示。
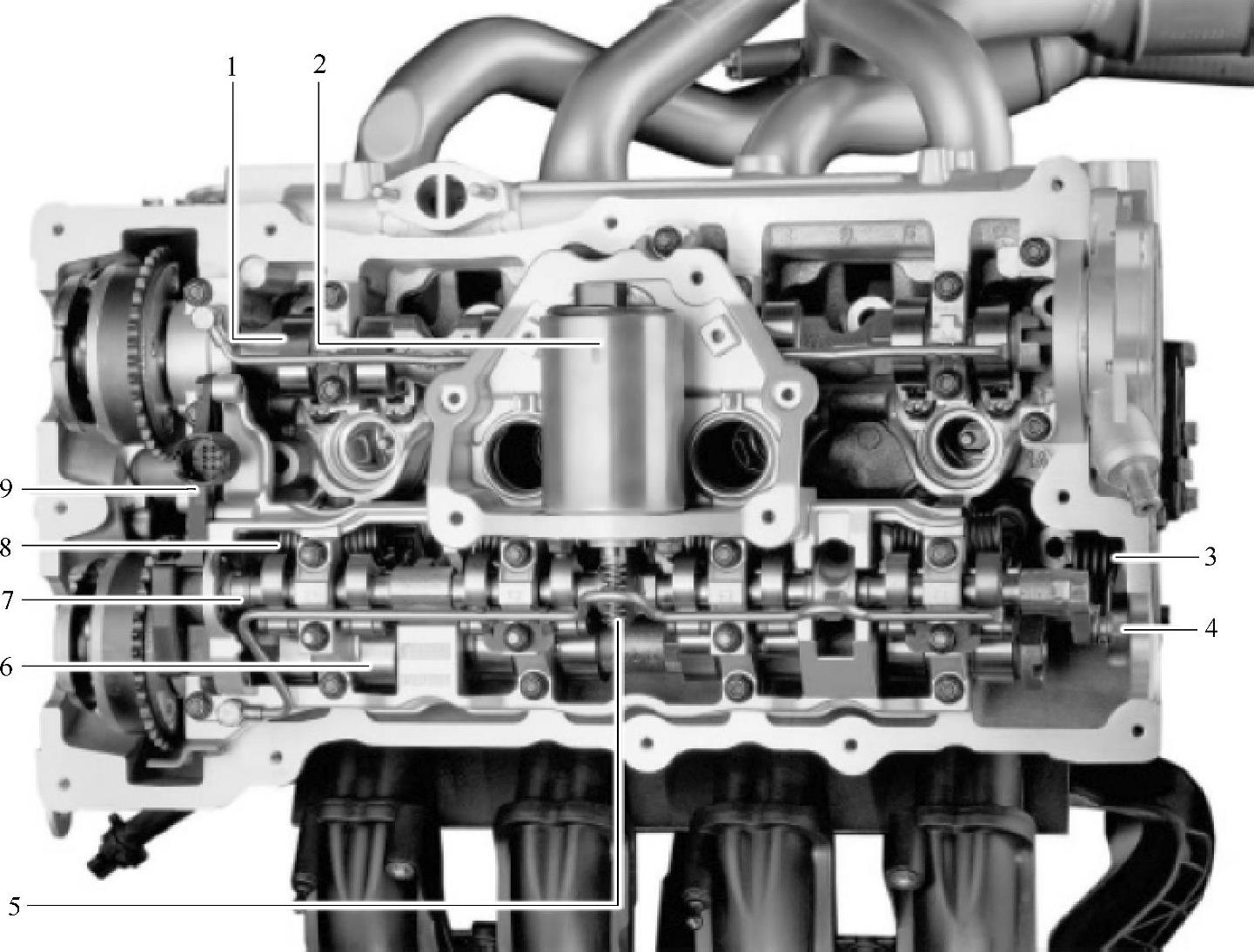
图3-3 电子控制气门的安装位置
1—凸轮轴 2—伺服电动机 3、8—扭转弹簧 4—凸轮轴扭转弹簧支架 5—蜗杆 6—凸轮轴 7—偏心轴 9—偏心轴传感器
扭转弹簧靠在偏心轴扭转弹簧支架上并通过该支架向偏心轴施加杠杆力。该扭转弹簧又称为转矩补偿弹簧,可在调节偏心轴时平衡偏心轴的不同转矩。由于研究表明扭转弹簧对伺服电动机的使用寿命没有任何影响,因此取消了这个部件。
气门升程最小限制如图3-4所示。达到最小气门升程时,偏心轴挡块靠在气缸盖挡块上,该挡块用螺栓固定在气缸盖内。因此,可以通过机械方式限制最小气门升程。
气门升程最大限制也通过一个机械挡块来限制,如图3-5所示。
 (www.daowen.com)
(www.daowen.com)
图3-4 气门升程最小限制
1—偏心轴挡块 2—气缸盖挡块

图3-5 气门升程最大限制
为了识别出机械挡块,可在挡块之间执行挡块限位程序。此时会将偏心轴由零行程调节到满行程。只有当发动机电子系统在发动机起动时识别到不可信数值时,才会执行挡块限位程序。也可由诊断系统触发挡块限位程序。
为了确保VALVETRONIC运行,需要新型电子组件。这些新组件包括气门升程控制单元(VALVETRONICⅡ的气门升程控制单元集成在发动机管理系统内)、伺服电动机和偏心轴传感器。节气门执行新的任务,出现VALVETRONIC故障时负责确保紧急运行。
气门升程控制单元:发动机管理系统负责控制气门升程,在第一代VALVETRONIC中由一个附加气门升程控制单元控制气门升程。气门升程控制单元的任务是控制伺服电动机,以便根据发动机控制单元的指令调节偏心轴。为了获得理想的动态性能,需要很高的电流强度。因此,在VALVETRONIC发动机上要对负责执行车灯功能的控制单元进行适配,以免车内和车外照明装置亮度不稳定。
伺服电动机:带有整流器的直流电动机,负责调节偏心轴。通过改变电动机转动方向和节拍控制时间可对偏心轴进行相应调节。进行最大调节时,伺服电动机的电流可到达40A。
偏心轴传感器:偏心轴传感器测量偏心轴转角,从而为调节功能提供实际参数。如图3-6所示,偏心轴传感器将偏心轴位置发送给气门升程控制单元或DME,其测量角度范围为180°。偏心轴传感器按磁阻效应原理工作:当附近磁场更改位置时,铁磁导体就会改变自身的电阻。为此偏心轴上装有一个带有永久磁铁的磁轮。偏心轴旋转时,这些磁铁的磁力线就会穿过传感器内的导磁材料。由此产生的电阻变化通过发动机控制单元换算为气门升程。必须用一个非磁性固定螺栓将磁轮固定在偏心轴上,否则传感器无法正常工作。
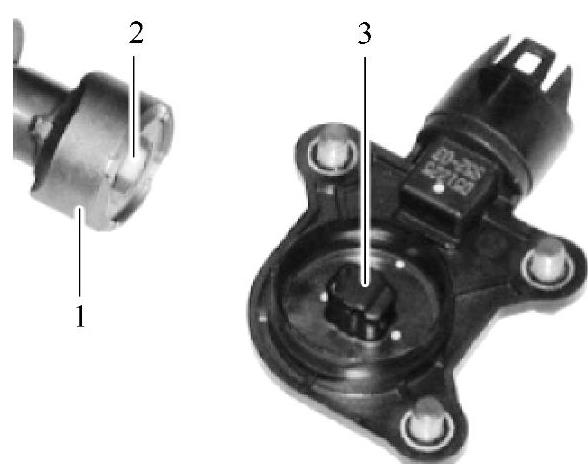
图3-6 偏心轴传感器
1—磁轮 2—固定螺栓 3—偏心轴传感器
发动机控制单元:发动机管理系统包含有控制气门升程的特性曲线。用于确定所需气门行程的主要信息是驾驶人通过加速踏板传递的负荷要求。系统根据输入数据确定气缸额定进气量。额定进气量换算为气门升程和正时时间范围。通过这些因素得到进气门的关闭时刻。实现最佳燃烧效果所需的残余气体量只能通过排气凸轮轴控制装置(排气VANOS)进行调节,因为进气管内没有产生回流的低压。发动机管理系统负责控制VANOS。使用VAL- VETRONICⅡ时,同样通过发动机管理系统控制气门升程。使用VALVETRONICⅠ时,行程指令通过CAN总线接口发送至气门升程控制单元,并通过偏心轴传感器和伺服电动机进行调节,如图3-7所示。
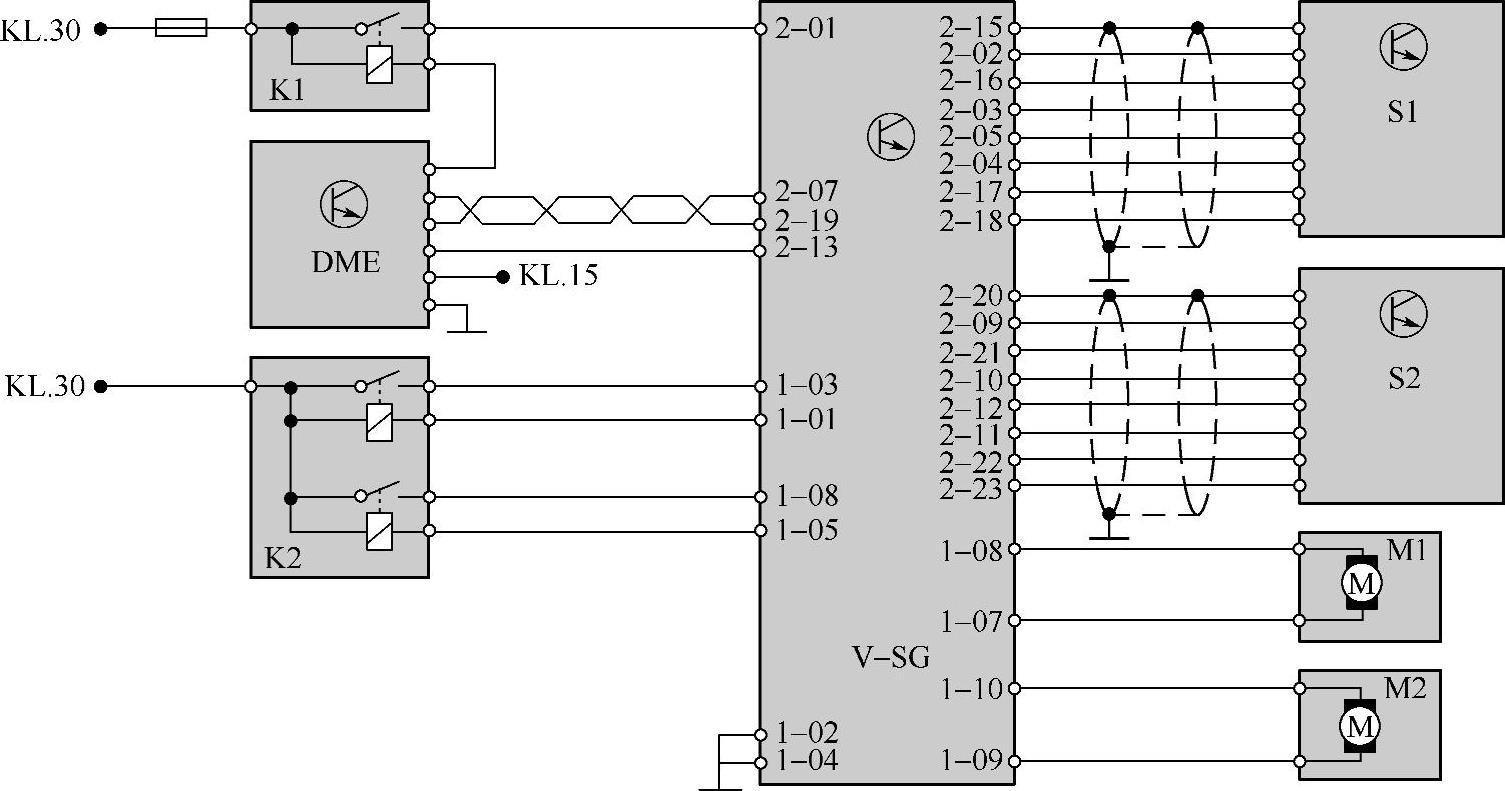
图3-7 电子气门控制线路图
DME—数字式发动机电子伺控系统 K1—DME主继电器 K2—过载保护继电器 M1—用于调整偏心轴的电动机(气缸列1~4) M2—用于调整偏心轴的电动机(气缸列5~8) V-SG—电子气门系统的控制单元 S1—偏心轴传感器(气缸1~4) S2—偏心轴传感器(气缸5~8)
节气门:VALVETRONIC发动机仍需要节气门完成燃油箱通风、曲轴箱通风、应急运行、三元催化转化器加热等任务。通过节气门可调节至约50mbar(1bar=105Pa)的进气管低压。为了确保燃油箱通风和曲轴箱通风需要达到这种低压程度,进气管内有一个压力传感器可提供参考基准。VALVETRONIC出现故障时会尽量调节至最大气门升程,并由节气门负责控制负荷。发动机管理系统根据特性曲线进行怠速调节。在起动过程中也可以根据特性曲线通过节气门进行怠速调节。发动机达到运行温度时,在约60s后切换到非节气模式(节气门完全打开)。但在寒冷的冬季,发动机以节气门全开起动,因为这有利于发动机起动。
免节气负荷控制:VALVETRONIC由全可变气门升程控制装置和可变凸轮轴控制装置(双VANOS)构成,因此可以任意选择进气门关闭时刻。仅在进气侧控制气门升程,而凸轮轴控制则在进气和排气侧进行。只有满足以下条件才能进行,免节气负荷控制:进气门的气门升程和进、排气凸轮轴的凸轮轴控制能够进行可变控制,如图3-8所示,可自由选择进气门的持续开启时间。进行曲轴箱通风时需要进气装置内存在最小真空,为此需要稍稍调整节气门。
电子气门技术的另一重要优点是,踩踏加速踏板时发动机产生反应的时间加快。传统发动机以加速踏板控制节气门的方式,加速踏板踩下节气门打开,还要等待空气流入填满进气歧管之后,才会大量进入发动机气缸,产生所需要的动力。而电子气门发动机加速踏板踩下时可直接控制加大进气门的开启深度,大量空气立刻流入发动机气缸,产生所需要的动力。电子气门发动机进气门开启深度最小为0.25mm,最大可达9.7mm,相差近40倍,然而从最小变化到最大,电子气门整体机构所需要的反应时间只要0.3s左右。
由于怠速时的最小气门升程非常小,必须确保气缸进气均匀分布,所有气门的开启程度必须相同。因此滚子式气门压杆和相关中间推杆分为不同等级。通过标记出的参数可区分不同等级的部件。在同一个气缸上始终安装相同等级的部件。通过在出厂前分配滚子式气门压杆和中间推杆可确保在最小气门升程时气缸也能均匀进气。分解气门机构时必须确保要将所有部件都装回原来的位置,否则可能造成气缸进气分布不均匀。分布不均匀的结果是发动机运转不稳定。

图3-8 双可调式凸轮轴的控制结构
1—排气侧控制单元 2—联接螺栓 3—弹簧片 4—进气侧控制单元 5—齿链啮合齿轮
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





