驱动系统作为电驱动系统的动力单元,一般来说,其能量流过程如图9-6所示。
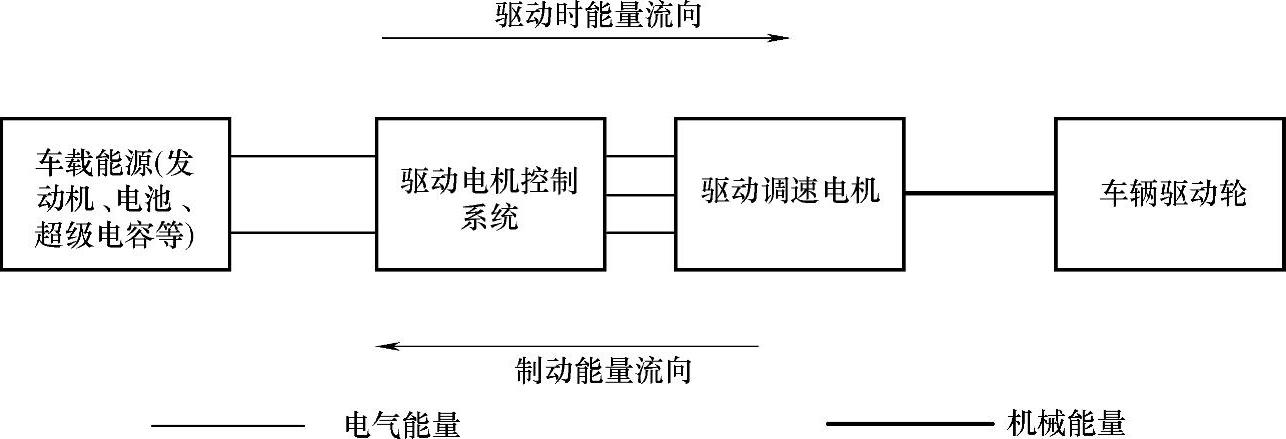
图9-6 驱动系统能量流
在整车行驶时,能量由车载能源供给(一般为直流电源),通过电机控制系统中逆变为子相(或者多项)交流驱动电压和电流,从而驱动电机输出转矩驱动车辆行驶;在制动等情况下,在车辆自身的惯性或者坡道势能的驱动下,驱动电机将转换工作模式,由电动模式转换为发电模式,从而驱动电机控制系统将其三相(多相)电压和电流整流为直流电源反馈到车载能源中。在对驱动系统的测试中(如图9-1所示测试平台),车载能源由测试平台的整流/逆变电源代替,而车辆驱动轮(负载)则由测功机代替。
为了进行系统和部件的性能测试,在此要对三个功率进行计算,包括驱动系统输入功率(也正是驱动电机控制系统输入功率和车载能源供给功率),这部分功率作为系统总的能量来源,用Pisys表示;驱动电机控制系统输出功率(驱动调速电机输入功率),这部分功率作为驱动系统内部的功率交换,用Potra(或者Pimtr)表示;驱动系统输出功率(也正是驱动电机输出功率和车辆驱动功率),用Posys表示。同时,在测试过程中有三个效率是最需要关注的,包括驱动电机控制系统效率ηtra、驱动电机效率ηmtr和驱动系统效率ηsys。
效率计算公式为
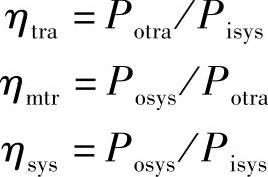
即 
由于驱动系统输入为直流,输出为驱动电机的转速和转矩,从而这两个功率的计算比较简单,可以直接通过通用的计算公式获得。
Pisys=UrmsDCIrmsDC (9-16)
式中,UrmsDC为车载直流电源的电压有效值;IrmsDC为车载直流电源的电流有效值。

式中,nmtr和Tmtr分别为驱动调速电机的输出转速和转矩。
由于驱动电机控制系统的输出为非正弦的信号,所以对于Potra(或Pimtr)的测量必须采用对非正弦信号的计算方法。
通常,非正弦电流的有功功率和无功功率分别定义为其基波和各高次谐波的有功功率和无功功率之和,即

无功功率的平均值为

式中,  、
、  、θh分别是每相第h次谐波的电压、电流有效值和其对应的相位;φh为功率角;m为电机相数。
、θh分别是每相第h次谐波的电压、电流有效值和其对应的相位;φh为功率角;m为电机相数。
对于非正弦供电的电机输入有功功率的测量也可以采用嵌入式计算法和自动测量法。
交流电机的瞬时电功率为电压、电流的瞬时值的乘积,即
P(t)=mu(t)i(t) (9-20)(https://www.daowen.com)
其平均功率为瞬时功率在一个周期内的平均值,即

在使用嵌入式系统进行测量时,采集电压和电流的离散值,当采样时间Δt足够小时,式(9-21)的积分可以用下式的求和来近似

式中,uj、ij分别为第j个采样点的电压和电流离散值;N为一个周期内的采样点数。
当采样时间相等时,有Δt=T/N,所以平均有功功率可以表示为

可见,平均有功功率的测量也转换为对电压、电流信号的离散值的采样,对每一个采样点的乘法运算、累加运算和平均值运算可以由嵌入式系统软件实现。
1.视在功率

在此定义S1为基频的视在功率。
畸变功率:当有谐波存在的时候,视在功率S不仅仅是由有功功率P和无功功率Q构成,同时还包括畸变功率D(伏安值):
D2=S2-(P2+Q2)
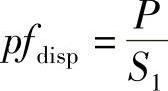
2.功率因数
功率因数是有功功率对视在功率的比值,即

定义位移功率因数为
定义畸变功率因数为

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






