开关磁阻电机的控制要求比较独特,因此感应电机和同步电机的控制方法不再适用。我们知道传统的控制方法如PID控制不适用于电动汽车,所以人们为电动汽车驱动的开关磁阻电机新开发了一种模糊滑模控制(FSMC)方法,这种方法综合利用了模糊逻辑控制(FLC)和滑模控制(SMC)。
由于FLC在不使用控制系统数学模型的条件下,能够将语言控制策略转换为自动控制,所以可用来处理复杂、不能精确定义的系统。但由于模糊控制规则是靠经验决定的,其隶属函数的选择主要靠试错法,因此FLC设计费时,而且受控系统的动态响应也不能事先确定。
应用SMC方法,控制系统对于外来干扰和参数变化具有很强的鲁棒性。因此,可以通过预定状态轨迹的理想滑模面来支配受控系统的动态特性。但由于系统的各种非理想性如开关磁滞性、控制系统和数字采样的延时等的存在,状态轨迹通常沿非理想滑模面振颤,这种不期望的振颤在控制系统产生高频非模型控制的动态特性。
FSMC方法结合了FLC和SMC的优点,即用SMC克服开关电机的非线性,用FLC减少控制振颤。电动汽车开关磁阻电机的速度控制系统如图6-32所示,它由两个闭环组成,一个是内部的电流环,另一个是外部的速度环。FSMC的输入是参考速度ω∗与反馈速度ω之差,而输出是参考转矩T∗。它的参考电流i∗用开关磁阻电机的非线性转矩-角特性表示。
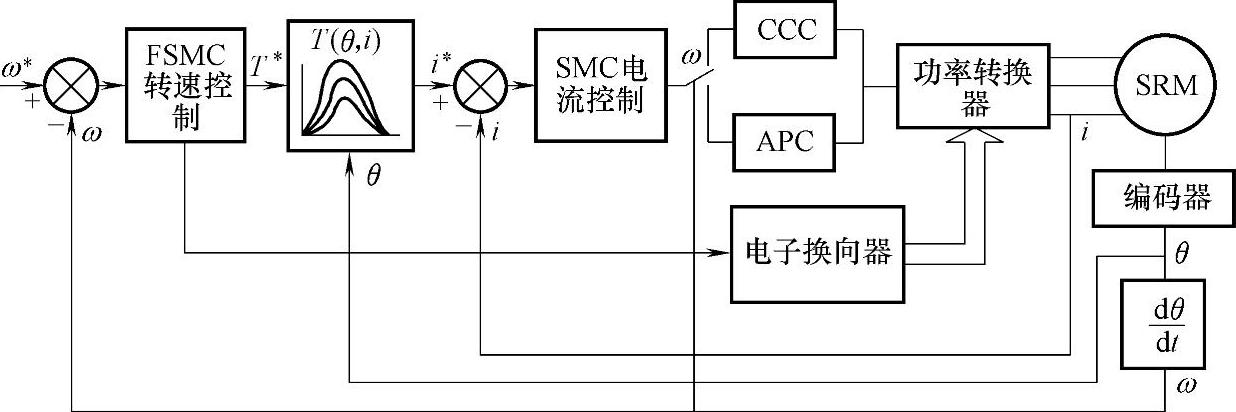
图6-32 开关磁阻电机的速度控制系统
设计FSMC系统时,把速度误差和速度导数作为状态变量,有

式中,B为黏着摩擦系数;J为转动惯量;T和TL分别为电机转矩和负载转矩。用  作为控制变量,则状态方程可表示为
作为控制变量,则状态方程可表示为

式中,  和
和  为系统干扰。滑模方式工作的两个开关面,电流控制和速度控制,定义为 (https://www.daowen.com)
为系统干扰。滑模方式工作的两个开关面,电流控制和速度控制,定义为 (https://www.daowen.com)

式中,系统动态特性受参数c控制。电流的滑模条件,即  ,通过控制相电压获得
,通过控制相电压获得

式中,Udc为直流回路电压。注意开关磁阻驱动电机在斩流方式工作时,要满足此条件。另外,给出如下滑模控制法则,可满足速度滑模条件,即  :
:

式中,α=ηJ/c;ueq=-Jx2/c。为确保滑模条件,参数η必须选得足够大。
为了减小控制振颤和转矩波动,模糊速度滑模方式条件的开关法则为
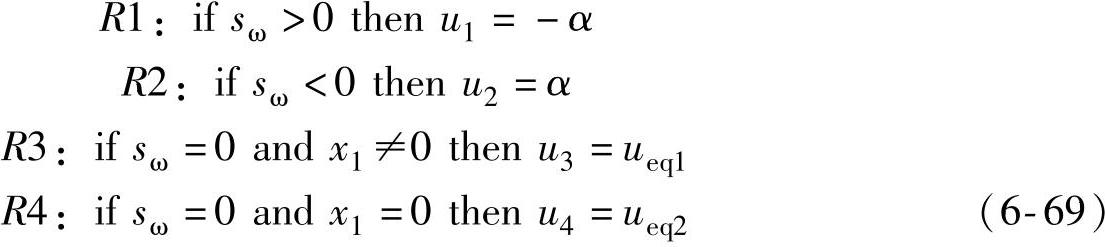
式中,ueq1和ueq2是两种不同的控制作用;开关线斜率sω=x1+cix2,i=1,2时是不同的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





