
异步电机的速度控制在一般工业控制中普遍应用,主要分为双PI电流内环和单PI速度外环,是一种串联控制结构。双PI电流内环在转矩控制算法中已应用,而速度外环控制可基于PI和模糊逻辑(Fuzzy Logic,FL)两种控制算法,实现异步电机的速度控制。
1.PI速度调节器
PI速度调节器的输入是异步电机速度误差,输出是转矩调节量,一般作为PI转矩电流调节器的参考输入。PI速度调节器的计算公式为

2.模糊逻辑速度调节器
由于PI速度调节器属于一维控制,其速度跟踪能力并不令人满意,为此提出了FL速度调节器。FL速度调节器属于多维控制,一般的FL采用二维控制,结构简单,计算量较小,适合实时控制。
FL速度调节器是一种非线性控制,它的两个精确输入误差定义为

如果将精确量与模糊量转换,为此假设系数ki1、ki2和k0有

式中,ΔTref是FL速度调节器的精确量,表示电机的转矩参考增量。(www.daowen.com)
为了实现模糊控制,需要采取模糊语言表达,规定为:{正大,正中,正小,零,负小,负中,负大}={PB,PM,PS,Z,NS,NM,NB}。根据上述定义,FL控制器的输入输出模糊集和基本论域为

其次,对规定的模糊语言表达进行量化处理,可以通过基于三角分布的隶属函数表示一个精确的模糊化程度,如图6-22所示。
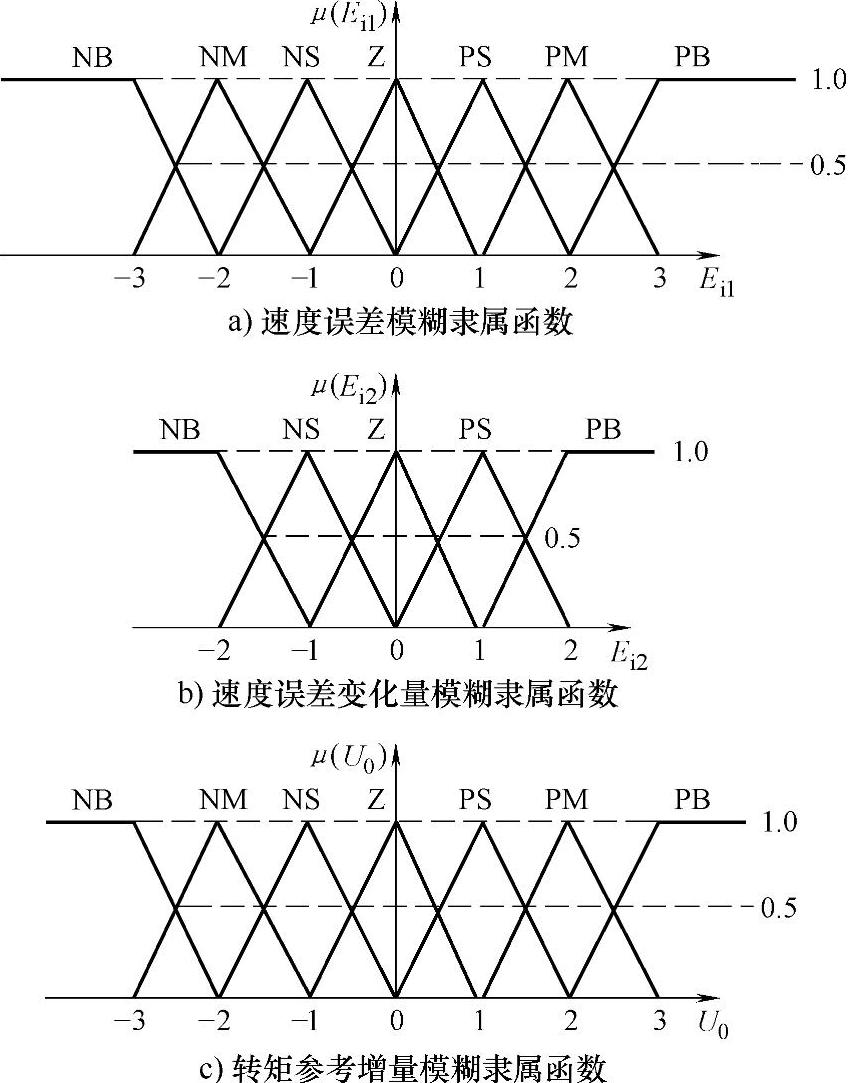
图6-22 速度模糊调节器输入输出隶属函数
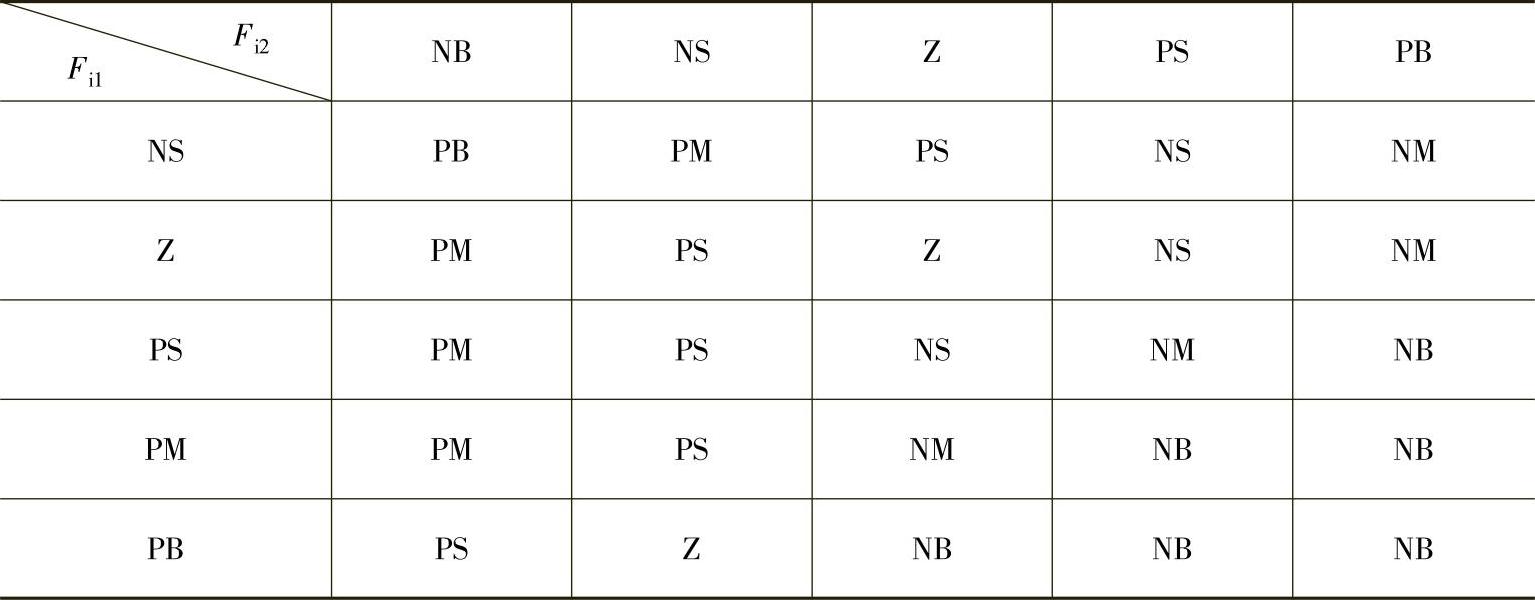
建立模糊逻辑规则是提高模糊控制系统性能的关键,基于{IF…THEN…}语言描述规则库。例如,{IF Fi1=NB,Fi2=NB,THEN F0=PB}。类似的模糊推理规则可以通过表6-1所示的规则库建立。然而,基于最小最大原理,通过模糊推理和输出隶属函数,获得模糊输出,最后进行模糊输出量化。虽然,模糊推理过程很烦琐,但通过MATLAB模糊工具箱可很容易地获得良好的模糊逻辑。
表6-1 模糊规则库

(续)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





