磁阻电机的研究最早可以追溯到19世纪40年代,英国研究者将其用于机车牵引系统。然而,直到20世纪60年代,由于电力电子器件技术、计算机技术和自动控制理论的发展,磁阻电机的研究才得以全面展开,其优点才被广泛了解。
1.开关磁阻电机的结构特点及工作原理
开关磁阻电机驱动系统是高性能机电一体化系统,主要由开关磁阻电机(Switched Reluctance Motor,SRM)、功率转换器、传感器和控制器4部分组成。其中开关磁阻电机为系统主要组成部分,实现电能向机械能的转化;功率转换器是连接电源和电机的开关器件,用以提供开关电机所需电能,其结构形式一般与供电电压、电机相数以及主开关器件种类有关;传感器主要用来反馈位置及电流信号,并传送给控制器;控制器是系统的中枢,起决策和指挥作用,主要是针对传感器提供的转子位置、速度和电流反馈信息以及外部输入的指令,实时加以分析处理,进而采取相应的控制决策,控制功率转换器中主开关器件的工作状态,实现对电机运行状态的控制。
开关磁阻电机是一种新型电机,由双凸极的定子和转子组成,其定子、转子的凸极均由普通的硅钢片叠压而成。转子既无绕组又无永磁体,定子极上绕有集中绕组。径向的两个绕组串联成一个两极磁极,称为“一相”。SRM可以设计成多种不同的相数结构,且定子、转子的极数有多种不同的搭配,可以设计成单相、两相、三相、四相及多相等不同相数结构,低于三相的SRM一般没有自起动能力。相数多,有利于减小转矩脉动,但同时也导致结构复杂,主开关器件多,成本增高。目前应用较多的是三相6/4极结构和四相8/6极结构。图6-10所示为一台四相8/6极SRM典型结构,定子有8个齿,转子有6个齿。每个定子齿上绕有一个线圈,其中径向相对的两个极的线圈串联构成一相绕组,共有4相绕组,转子上无绕组。
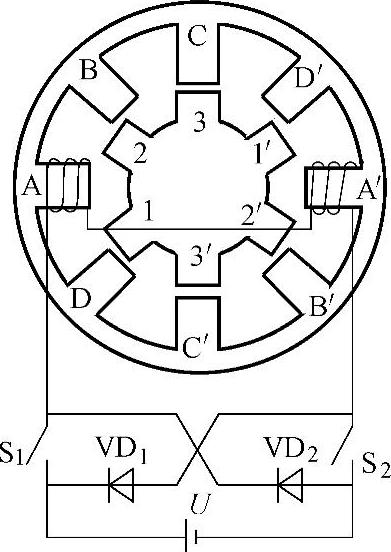
图6-10 四相8/6极SRM典型结构(只画一相绕组)
SRM的运行遵循“磁阻最小原则”——磁通总是沿磁阻最小的路径闭合。当定子的某相绕组通电时,所产生的磁场由于磁力线扭曲而产生切向磁拉力,迫使相近的转子极即导磁体旋转到其轴线与该定子极轴线对齐的位置,即磁阻最小位置。
在图6-10中,当定子D—D′极励磁时,1—1′向定子轴线D—D′重合的位置转动,并使D相励磁绕组的电感以图中定、转子所处的相对位置作为起始位置,依次给D→A→B→C相绕组通电,转子即会逆着励磁顺序以逆时针方向连续旋转;反之,若依次给B→A→D→C相通电,则电机即会沿顺时针方转动。可见,SRM的转向与相绕组的电流方向无关,而仅取决于相绕组通电的顺序。另外,当主开关器件S2导通时,A相绕组从直流电源U吸收电能,而当S1、S2关断,绕组电流经续流二极管VD1、VD2继续流通,并回馈给电源U。SRM传动的共性特点是具有再生作用,系统效率高。
通过控制加到SRM绕组中电流脉冲的幅值、宽度及其与转子的相对位置(即导通角、关断角),即可控制SRM转矩的大小与方向,这正是SRM调速控制的基本原理。
2.开关磁阻电机的性能特点
与当前广泛使用的感应电机变频调速系统相比,开关磁阻电机及其驱动系统在成本、效率、功率密度、调速性能、可靠性和散热性能等方面具有一定的优势。综合分析比较,开关磁阻电机驱动系统的特点主要集中在以下几个方面:
1)开关磁阻电机的结构简单,紧凑牢固,适于在高速、高温环境下工作。开关磁阻电机为凸极结构,转子上无绕组和永磁体,转动惯量小,易于加、减速,特别适用于高速旋转的工作环境。定子绕组为集中绕组,制造简单,且端部短而紧凑,易于冷却。因此,该电机可适用于工作条件恶劣(如高温)甚至强振动的环境,而且维护简单,有良好适应能力。
2)功率转换器结构简单,容错性能强。由于转矩与电枢绕组电流方向无关,因此可以减少功率转换器的开关器件个数,降低系统硬件成本,增加运行可靠性。由于各绕组互相独立工作,系统可以断相工作,容错能力强。系统中每个功率开关器件均直接与绕组串联,避免了直通短路现象。因此,功率电路的保护电路也可以简化,提高了系统的可靠性。
3)可控参数多,调速性能好。开关磁阻电机驱动系统参数主要有开通角、关断角、相电流幅值和相绕组电压,可控参数多,控制较为灵活,可以有多种控制方法使电机运行于最佳状态,而且可以在不增加辅助开关器件的情况下,实现电机的四象限运行。
4)起动转矩大,调速范围宽。开关磁阻电机起动转矩较大,并可以在宽速度范围内实现恒功率运行,适用于频繁起停及正反方向的交替运行。
5)功耗小,效率高。由于开关磁阻电机转子不存在绕组,降低了电机的铜损,并且能在很宽的功率和转速范围内都保持高效率。
开关磁阻电机驱动系统应用范围广泛,目前已成功应用于电动汽车用驱动系统、家用电器、工业应用以及航空航天等领域。其中电动汽车领域是开关磁阻电机较成功的应用领域之一,开关磁阻电机驱动系统在电动汽车领域应用的主要优势如下:
1)通过适当的控制策略和系统设计,电机能满足电动汽车四象限运行要求,并在高速运行区域内能保持较强的制动能力。(www.daowen.com)
2)电机驱动系统有良好的散热性能,功率密度大,减少了电动机体积和质量,节省了电动汽车的有效空间。
3)电机在很宽的功率和转速范围内都能保持高效率,能有效提高电动汽车的一次充电的连续行驶里程。
4)电机可以实现良好控制的特性,而且容易智能化,能通过编程和替换电路元器件,能满足不同类型电动汽车的运行要求。
5)电机驱动系统无需或很少需要维护,适用于高温、恶劣工作环境,具有良好的适应性能。
以上特点使开关磁阻电机驱动系统适用于电动汽车在各种工况下的运行,因此在电动汽车领域具有一定的应用前景。
3.开关磁阻驱动电机控制系统
绕组电流的非正弦与铁心磁通密度的高饱和是SRM运行的两个特点。由电路基本定律列写包括各相回路在内的电气主电路的电压平衡方程式,电机的每一相都需要一个方程,电机第k相电压平衡方程式为

式中,Uk为加在k相绕组的电压;Rk为k相绕组的电阻;ik为k相绕组的电流;ψk为k相绕组的磁链,ψk=Lk(θk,ik)ik。
由于磁路非线性,通常SRM的转矩根据磁共能来计算,即

在特定情况下,开关磁阻电机没有磁饱和,电感与相绕组电流无关,可推导出磁阻转矩为

电机的转矩方向不受电流方向的影响,仅取决于电感随转角的变化。若dL/ dθ>0,则相绕组有电流流过,产生电动转矩;若dL/dθ<0,则产生制动转矩。因此通过控制加到电机绕组中电流脉冲的幅值、宽度及其与转子的相对位置,即可控制电机转矩的大小与方向。
开关磁阻电机调速系统由SRM转子位置传感器逆变器和控制器组成,其基本控制方式如下:
1)基速以下电流或电压斩波控制获得低速恒转矩特性。
2)基速以上角度位置控制获得高速恒功率特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





