我国城市公共交通拥挤,大部分城市客车长期处于能耗高和排放高的不良工作状态,要建设环境友好型、资源节约型社会,在城市客车中发展纯电动大客车是实现节能减排目标的重要途径之一。由于城市客车质量大,行驶工况复杂,目前车载能源有着较大的限制,高功率密度、高效率的大功率动力驱动系统成为发展纯电动大客车必须着重研究的关键技术之一。电动汽车市场的迅速发展以及国家对发展新能源汽车的重视也带动着对大功率动力驱动系统的大量需求。由于当前大功率电机驱动系统及其传动系统有着较大的限制,采取单台电机集中式驱动形式要求电机具有较大的功率和转矩,而电机大转矩要求传动轴变粗,电机高转速带来旋转部件线速度大大提高,这样对电机、机械传动的可靠性提出新的技术挑战。多动力耦合传动技术的出现为大功率动力驱动系统技术的发展提供了新的解决途径,利用多个小功率电机耦合驱动代替单个大功率驱动电机集中式驱动,可以突破当前大功率电机驱动系统及传动系统的限制,扩大小功率驱动电机的应用范围。
1.基本结构
双电机行星轮耦合驱动系统由一组简单行星轮机构、两台驱动电机和一个制动器组成。图4-33所示为一种双电机行星轮耦合驱动结构。在低速时,电机1与行星机构太阳轮相连,通过制动器制动齿圈、行星架输出,实现大变比减速后大转矩输出,满足车辆低速爬坡;在高速时,齿圈解锁,电机2与行星机构齿圈相连,与电机1通过行星机构实现功率耦合,共同驱动车辆;在车辆由低速模式切换到高速模式的过程中,电机1一直处于驱动状态,电机2通过零速制动可使齿圈受力减小,方便制动器解除,制动器解除后电机2再转为驱动状态,实现高速两台电机功率耦合;在车辆由高速模式切换到低速模式的过程中,电机2通过再生制动迅速将齿圈减速至零,方便制动器将齿圈锁止,齿圈锁止后电机2处于关闭状态。在整个模式切换过程中,充分利用了电机2零速制动实现柔性模式切换,制动器与齿圈没有速度差,冲击小。图4-34所示为其耦合结构外形图。
2.双电机行星轮耦合驱动系统工作模式分析
双电机行星轮耦合驱动系统主要有两种工作模式:电机1工作模式、电机1与电机2耦合工作模式。这两种工作模式又可以进一步分为双电机行星轮耦合驱动系统的多种运行状态。例如,电机1工作模式可细分为电机1驱动运行状态和电机1用作发电机进行制动能量回馈的运行状态,同时电机1工作模式下的车辆运行工况又可细分为车辆前进工况和车辆倒车工况;电机1与电机2耦合工作模式也可分为以上运行状态。不同运行状态下的控制方法是不同的,因此,确定双电机行星轮耦合驱动系统的运行状态是进行控制研究的必要基础。
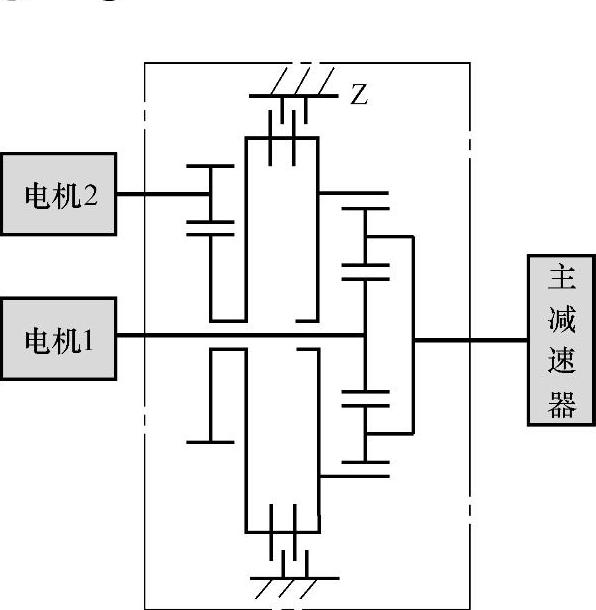
图4-33 双电机行星轮耦合驱动结构
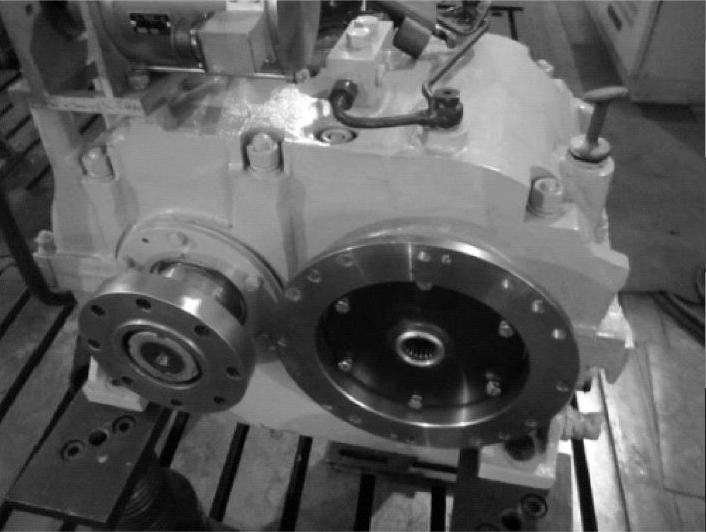
图4-34 双电机行星轮耦合驱动结构外形
经分析,双电机行星轮耦合驱动系统可细分为5种工作模式,两个电机以及制动器B的工作状态共同决定双电机行星轮耦合驱动系统的工作模式。制动器B的状态决定了动力传递的路线,电机1与电机2的工作状态决定了动力的传递方向,它们相互配合实现了双电机行星轮耦合驱动系统的5种工作模式,分别为:空档模式、电机1驱动模式、电机1与电机2行星轮耦合驱动模式、电机1制动能量回收模式、电机1与电机2联合制动能量回收模式。
(1)空档模式
当双电机行星轮耦合驱动系统遇到红灯或需要临时停车时,驾驶人将操纵手柄置于N(或P)位置,切断动力源与车轮的机械连接。车辆停驶在水平路面上,整车对外没有动力输出,电机1和电机2均关闭,行星轮耦合机构的制动器B分离,系统对外没有动力输出,如图4-35所示。
此时,电机1和电机2均关闭,电机转子转速为零,因此太阳轮和齿圈的转速保持为零,行星架的转速也为零。同时为了防止纵向力作用于车身,导致车辆滑行,设计了驻车制动机构。
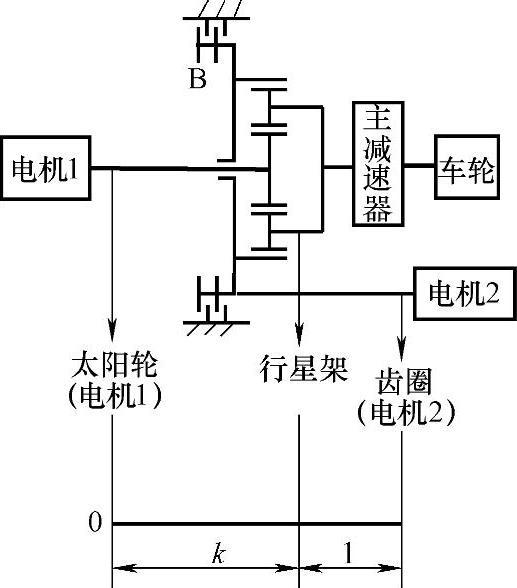
图4-35 空档模式
(2)电机1驱动模式
当汽车低速加速或爬坡,需要大转矩时,制动器B将齿圈锁止,电机2关闭,电机1把电能转化为机械能传递给简单行星轮机构的太阳轮,经行星轮由行星架输出,动力经过主减速器等传递给车轮,最终转化为整车行驶的动能,如图4-36所示。
电机1驱动模式的约束条件有
此时双电机行星轮耦合驱动系统的数学模型可以表示为
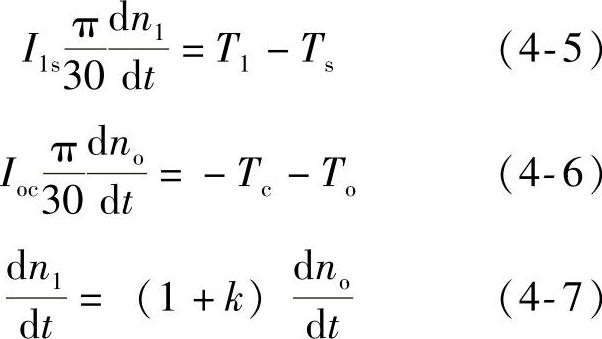
整理得
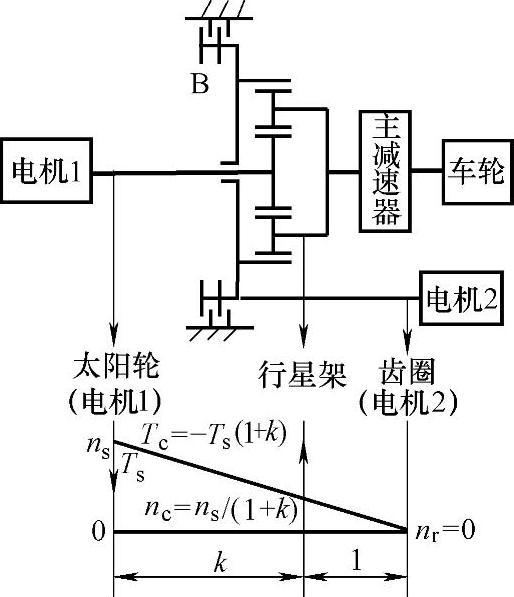
图4-36 电机1驱动模式

式中,I1s为等效到电机1转子轴上的转动惯量;Ioc为等效到驱动轴上的转动惯量;T1为电机1转矩;To为驱动轴转矩;n1为电机1转速;no为驱动轴转速;Ts为太阳轮转矩;Tr为外齿圈转矩;Tc为行星架转矩;k为行星轮系数,  ,zr为齿圈齿数,zs为太阳轮齿数。
,zr为齿圈齿数,zs为太阳轮齿数。
上述微分方程表述了电机1驱动模式在非稳态时各构件的转矩与运动关系,当系统达到稳态时,可得转矩关系为T1(1+k)-To=0,即电机1输出转矩经过行星齿轮驱动车辆前进。这种模式下驱动轴的转速由电机1的转速确定:n1=(1+k)no。由等效杠杆可得电机1单独驱动的最高车速为

式中,n1max为电机1的最高转速;v1max为电机1驱动时的最高车速;io为主减速比;rd为车轮有效半径。
(3)电机1与电机2行星轮耦合驱动模式
当双电机行星轮耦合传动系统行驶车速较高时,驱动功率较大,而驱动力矩较小时,电机1单独驱动已不能满足车辆的行驶需求。为了满足车辆的功率需求,设计了电机1与电机2行星轮耦合驱动模式。在该模式下,制动器B分离,电机1和电机2同时向行星机构输入动力,电机1传递给太阳轮,电机2传递给齿圈,经行星轮传递给行星架输出动力驱动车辆,如图4-37所示。
该模式的约束条件是
TB=0
代入双电机行星耦合驱动系统的数学模型可得
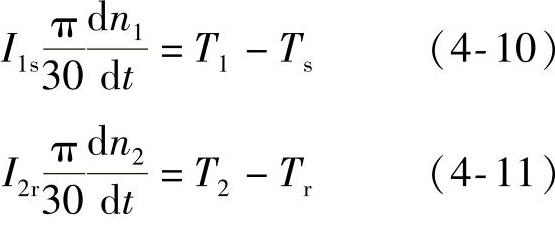
式中,I2r为等效到电机2转子轴上的转动惯量;T2为电机2转矩;n2为电机2转速。
 (https://www.daowen.com)
(https://www.daowen.com)
通过上述演化的微分方程可知,电机1与电机2行星轮耦合驱动模式下在非稳态时双电机行星轮耦合驱动系统各构件的转矩传递和运动关系。当电机1与电机2行星轮耦合驱动模式达到稳态时,有
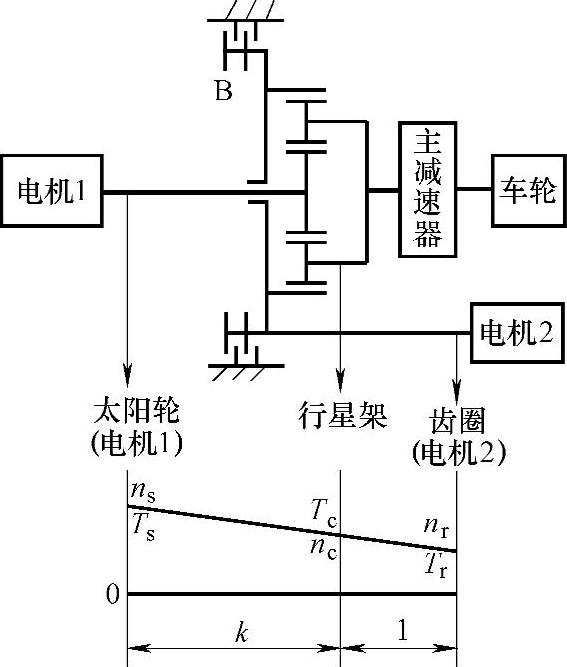
图4-37 电机1与电机2行星轮耦合驱动模式

可以通过式(4-14)求得双电机行星轮耦合驱动系统各构件的转矩传递关系为

驱动车辆的力来自电机1和电机2。这种模式下驱动轴的转速由电机1和电机2的转速共同确定
n1+kn2=(1+k)no (4-16)
由等效杠杆可得电机1与电机2耦合驱动时的最高车速为

式中,n2max为电机2的最高转速;v12max为电机1与电机2耦合驱动时的最高车速,它决定了双电机行星轮耦合驱动车辆的最高车速值,且由电机1与电机2工作的最高转速共同决定。
(4)电机1制动能量回收(再生制动)模式
当双电机行星轮耦合驱动系统制动时可将制动能量以电机1或电机2发电的形式回收。当车速较小时,以电机1发电制动模式进行能量回收;车速较高时,则以电机1与电机2共同发电的模式进行能量回收。在电机1制动能量回收模式下,动力从驱动轮到电机的传递经过简单行星轮机构的行星架、行星轮、太阳轮,此时要求齿圈锁止,制动器B接合,如图4-38所示。
电机1再生制动的约束条件有
TB=-Tr=-kTs
n2=0
T2=0
将这些约束条件带入到双电机行星耦合驱动系统的数学模型,同时把To看成主动力矩,把T1看成阻力矩,于是再生制动的演化方程变成
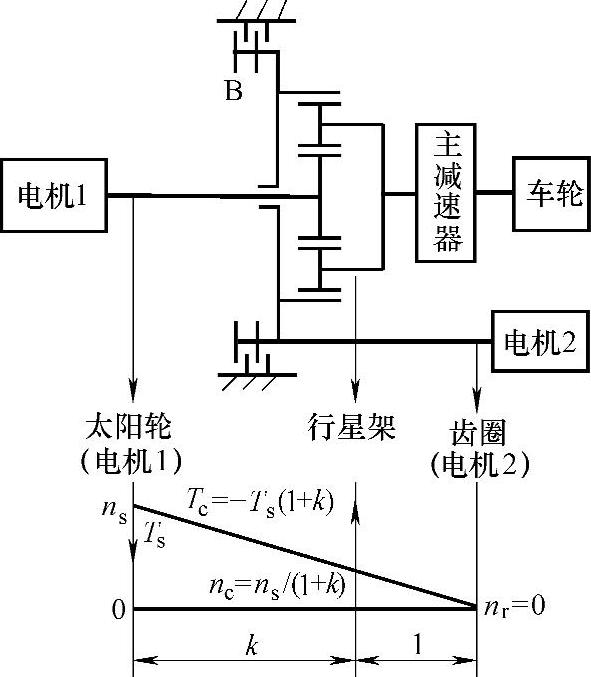
图4-38 电机1制动能量回收模式



整理得

再生制动模式也是非稳态过程,因为在制动过程中车速一直在降低,则行星架的转速及电机1的转速也在变化。如果荷电状态(State of Charge,SOC)过高,为了保护电池,双电机行星轮耦合驱动系统不再实施再生制动,车辆完全依靠机械制动。
(5)电机1与电机2联合制动能量回收(再生制动)模式
当车辆在车速较高的情况下制动时,需要由电机1、电机2联合发电制动。动力从驱动轮到电机的传递经过简单行星齿轮机构的行星架和行星轮,到太阳轮(电机1)和齿圈(电机2),此时制动器B分离,如图4-39所示。
该模式的约束条件为
TB=0
代入双电机行星轮耦合传动系统的数学模型可得
上述微分方程描述了电机1与电机2联合再生制动过程中双电机行星轮耦合驱动系统的转矩传递与运动关系。如果SOC过高,为了保护电池,双电机行星轮耦合驱动系统不再实施再生制动,车辆完全依靠机械制动。
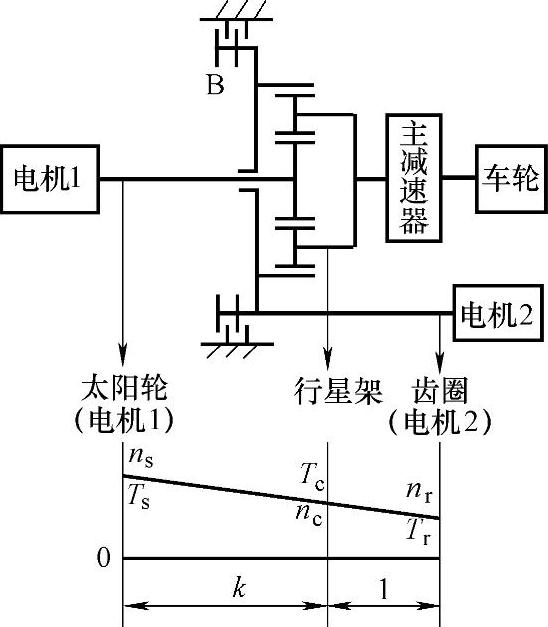
图4-39 电机1与电机2联合制动能量回收模式
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






