由于电动汽车驱动系统在不同种类汽车上的配置和作用不尽相同,其评估方法也不可能完全一致,在混合动力汽车中,驱动电机与发动机共同作用,对其驱动系统的评估所涉及的因素较之在纯电动汽车和燃料电池电动汽车上驱动系统所考虑的因素更多。因此,在以下评估方法的分析中,将以混合动力汽车驱动系统为分析对象,而纯电动汽车和燃料电池汽车的驱动系统作为混合动力驱动系统的特例(即不考虑发动机影响因素)。
(一)电驱动系统综合性能评价指标
电驱动系统作为电动汽车动力总成的关键部件,其选择是一个多条件约束的整体化求解过程,涵盖了诸多因素,如汽车的动力性能、汽车的种类、汽车的运行工况、汽车的能量管理控制策略等。其特性大致可归纳为大转矩密度、宽调速范围、宽转矩变化范围、精确的控制性、稳定的静态特性、良好的动态性能、高能量效率。评价体系的建立既要求能够反映电驱动系统是否满足车辆使用要求,又要求能够描述电驱动系统的实际运行效能。下面将从常规试验性能指标和基于工况的运行效能指标两方面描述混合动力汽车电驱动系统的综合性能评价体系。
混合动力汽车通过能量管理策略使动力装置有机协调配合,实现最佳能量分配,达到低能耗、低污染的效果。为了在常用循环工况获得较好的使用性能和较高的能量效率,目前有三种途径:
1)通过提高各个动力系统部件(发动机、动力电池、电机驱动系统)各自的效率来实现,但是各个部件的效率受技术水平和成本限制的程度不同,因此对系统能量效率产生的影响是不一样的,可能出现提高动力系统部件的效率而整体效率提高不大、但成本却大大增加的现象。
2)结合换档策略和控制策略强制使发动机、电机在高效区工作,这只是一种“被动”行为,可能会产生效率提高、油耗增加的异常现象。
3)基于电机/发动机的效率特性,使其高效率区位置和分布与经常使用的循环工况相匹配,可使发动机/电机“主动”工作在高效率区,在高效率区工作输出的功率基本全用于驱动车辆,不会产生多余的功率损失。因此,基于行驶工况从“主动”的角度考察电驱动系统高效区利用率以及系统能量效率,不仅有助于提高混合动力汽车动力系统的整体运行效率,而且还为动力系统部件根据要求进行优化设计提供了方向。图3-13所示为基于工况的运行效能评价指标。
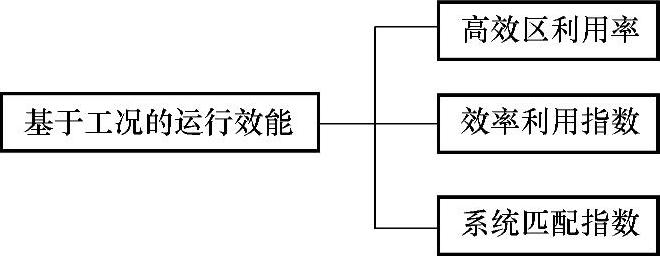
图3-13 基于工况的运行效能评价指标
1.高效区利用率
由于行驶工况受多种因素影响而复杂多变,因此电驱动系统的工作点及效率分布情况也在很大范围内变化。为了解电驱动系统在某一行驶工况下工作点分布范围与其高效区的“主动”吻合程度,将电驱动系统的效率特性与使用环境综合,并定义电机效率区间利用率为电驱动系统效率位于某区间的工作点数量与全部工作点数量的比值,记为ηi。高效区利用率定义为效率大于80%的工作点数量与全部工作点数量的比值,即

式中,Ni为电驱动系统效率位于第i个效率区间的工作点数目;N为整个工况循环下电驱动系统工作点的数目。
ηi表征了具体工况下电驱动系统对整个最佳效率工作区的利用程度,反映了电驱动系统与行驶工况的匹配情况,可以直观对比描述同一工况下不同电驱动系统以及不同工况下同一电驱动系统的效率区间利用率。
以表3-2所示的国内某混合动力汽车参数为例,结合具体行驶工况进行仿真。图3-14所示为两种典型行驶工况,图3-15所示为电驱动系统工作区间分布范围。
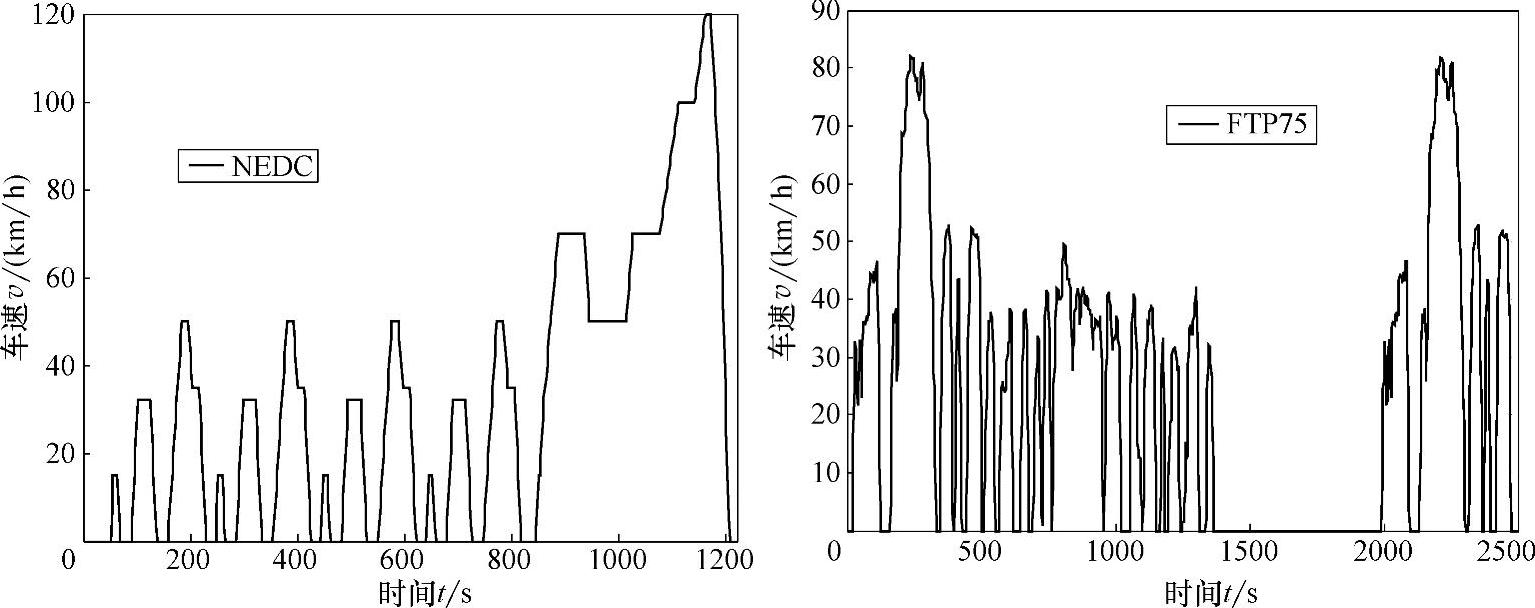
图3-14 两种典型行驶工况
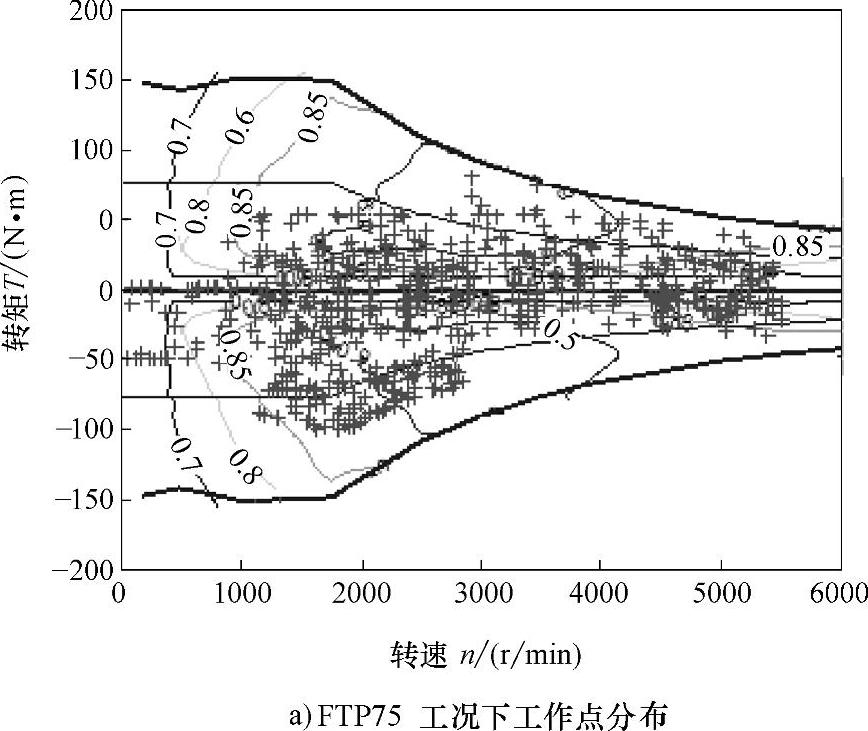
图3-15 电驱动系统工作区间分布
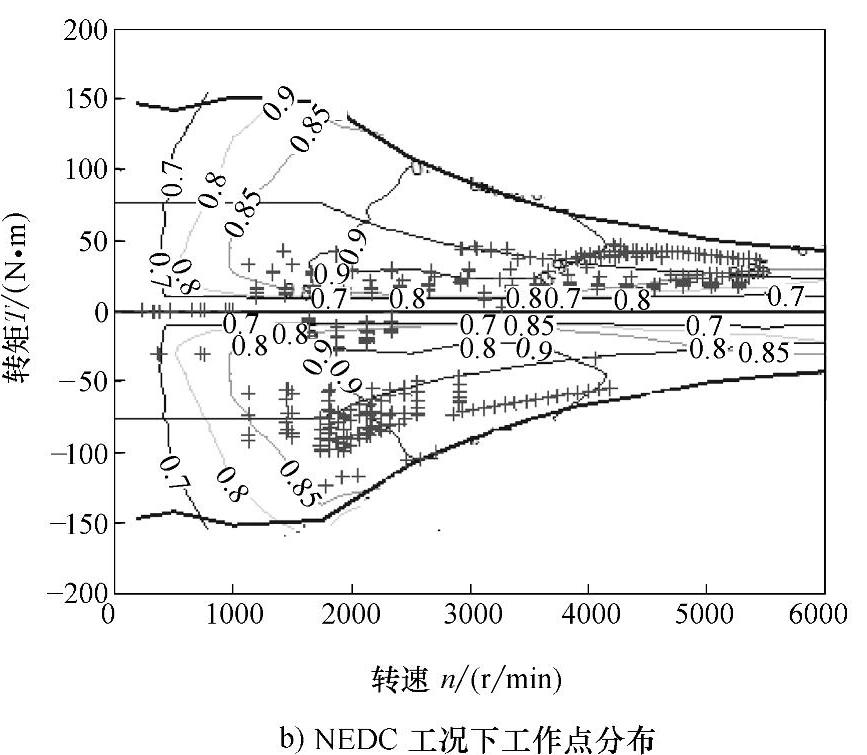
图3-15 电驱动系统工作区间分布(续)
表3-2 某混合动力汽车及零部件参数
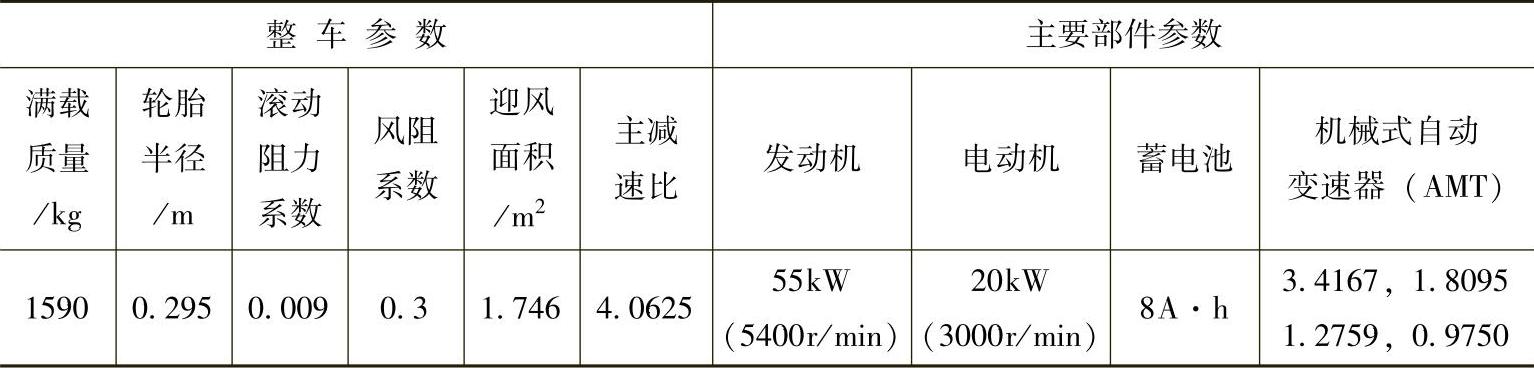
图3-16所示为不同工况下电驱动系统的效率区间利用率。NEDC工况下电驱动系统效率高于80%的工作区间约占87.84%,效率高于90%的约占21.38%;
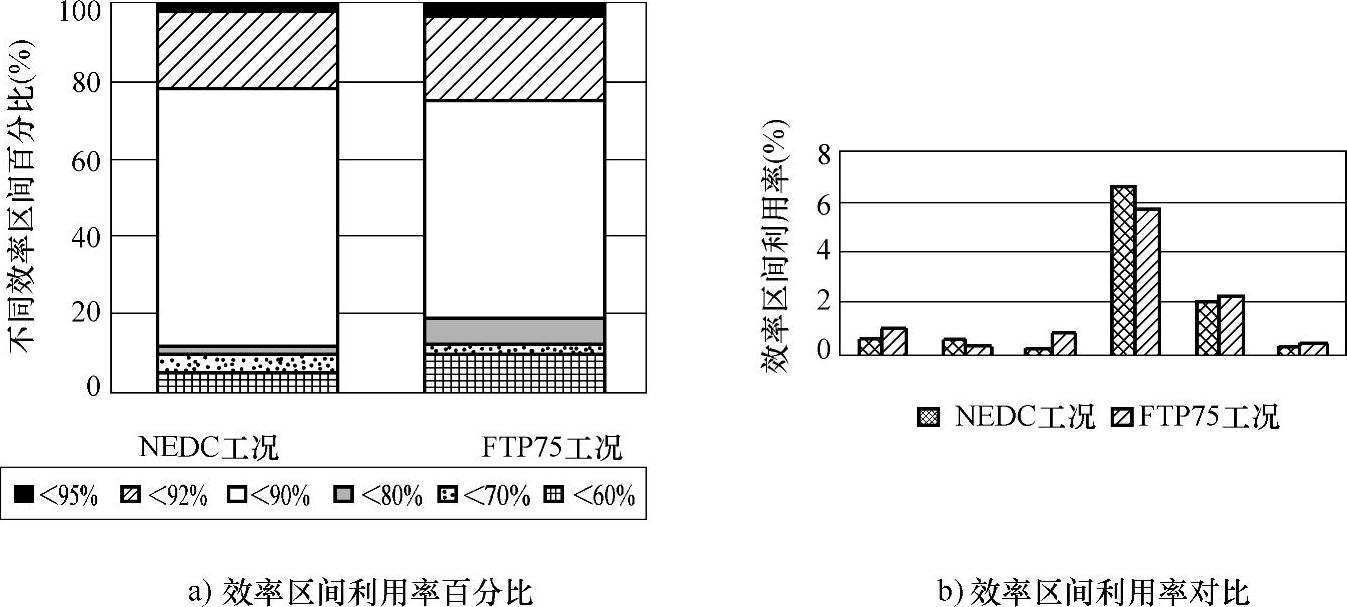
图3-16 电驱动系统效率区间利用率
FTP75工况下电驱动系统效率高于80%的约占80.66%,效率高于90%的约占24.65%。从效率区间来看,FTP75工况下效率属于[90%,92%]的工作区间的百分比大于NEDC工况约为6%,而[80%,90%]的百分比小于NEDC工况约为10%。
2.效率利用指数
为了能定量评价电驱动系统在某一工况下的工作情况,针对不同效率区间对电驱动系统效率发挥程度的影响,提出效率利用指数

式中,λ为效率利用指数;wi为第i个效率区间的权重;ηi为第i个效率区间利用率;ηref为同类机型目前最高的参考效率。
行驶工况的特性直接影响着效率区间的利用率,分析行驶工况在不同车速区间的速度频数得到车速直方图,利用仿真得到的效率分布可以求出效率的时域响应,定义电驱动系统伪加权效率  为
为

式中,Vi为第i个行驶工况车速区间速度点数;V为整个行驶工况的速度点数;ηi为对应的驱动系统效率。
伪加权效率根据不同行驶工况下速度区间的分布情况,反映了处于不同速度区间的工作效率分布对于效率区间利用率的影响。效率区间权重wi直接与行驶工况的特性相关,第i个效率区间的权重为

式中,m为第i个效率区间的工作点数;n为效率区间的数目。
利用效率区间利用率,结合式(3-18)求出电驱动系统效率利用指数。图3-17所示为行驶工况NEDC和FTP75车速直方图,反映了该工况下速度的分布情况。
由仿真得到电驱动系统转矩时域响应,利用测试平台上测试的电驱动系统效率特性,可以求出行驶工况对应效率的时域响应。图3-18所示为行驶工况下电驱动系统效率的时域响应。
通过式(3-19)和式(3-20)得到工况下效率区间的权重,见表3-3。
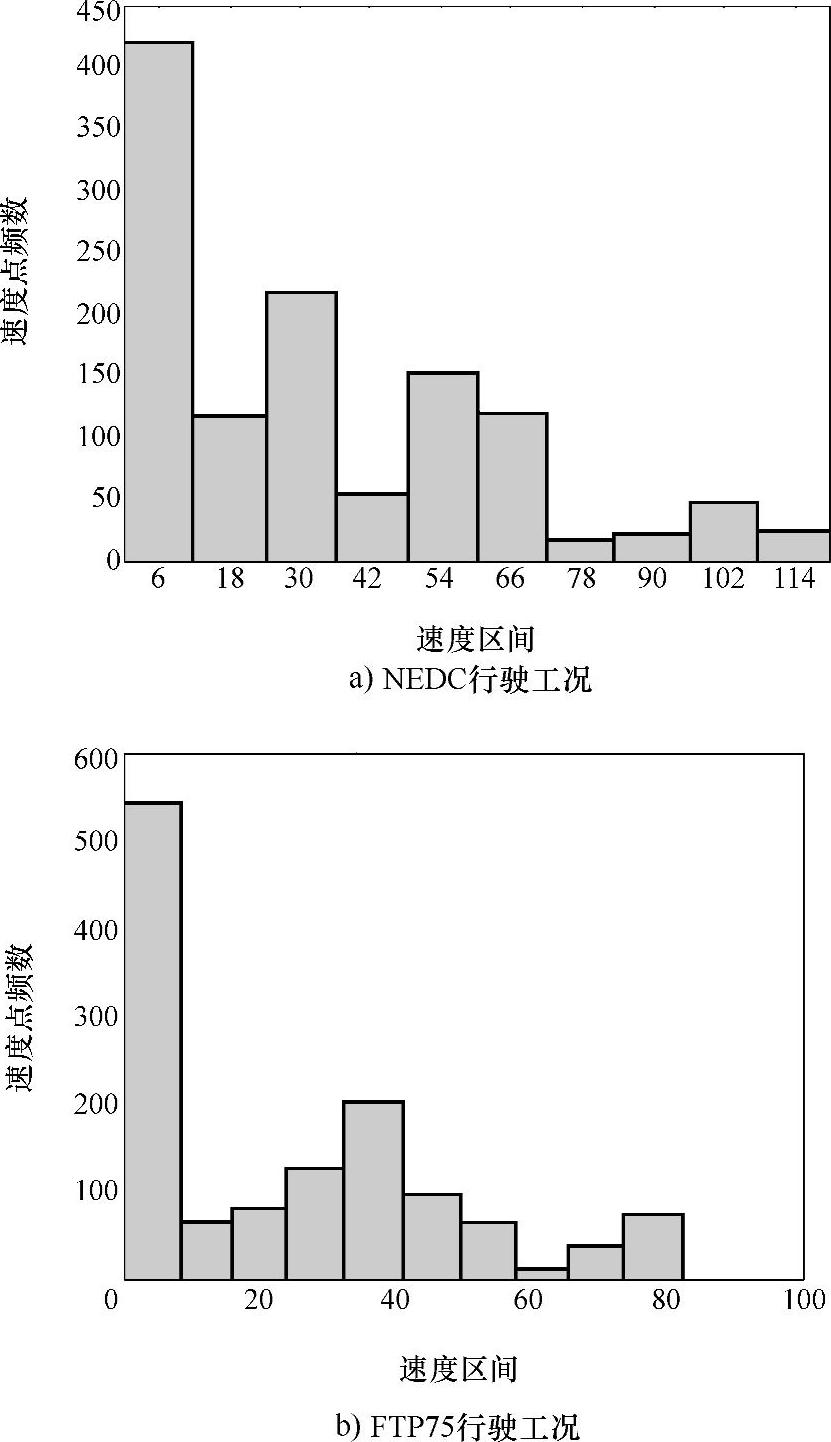
图3-17 行驶工况NEDC和FTP75车速直方图
表3-3 电驱动系统效率区间权重

由式(3-18)可得,NEDC行驶工况下电驱动系统效率利用指数为53.6,FTP75行驶工况下效率利用指数为40.9。
3.系统匹配指数
混合动力汽车通过能量管理策略协调发动机和电动机的运行,保证整车的性能达到最优,提高电驱动系统高效率区间利用率的同时,应保证发动机的经济运行。因此,将“车辆-行驶工况”作为一个系统考虑,结合效率利用指数,定量表述电驱动系统、发动机和行驶工况的匹配程度,提出了混合动力系统匹配指数MHEV,定义为
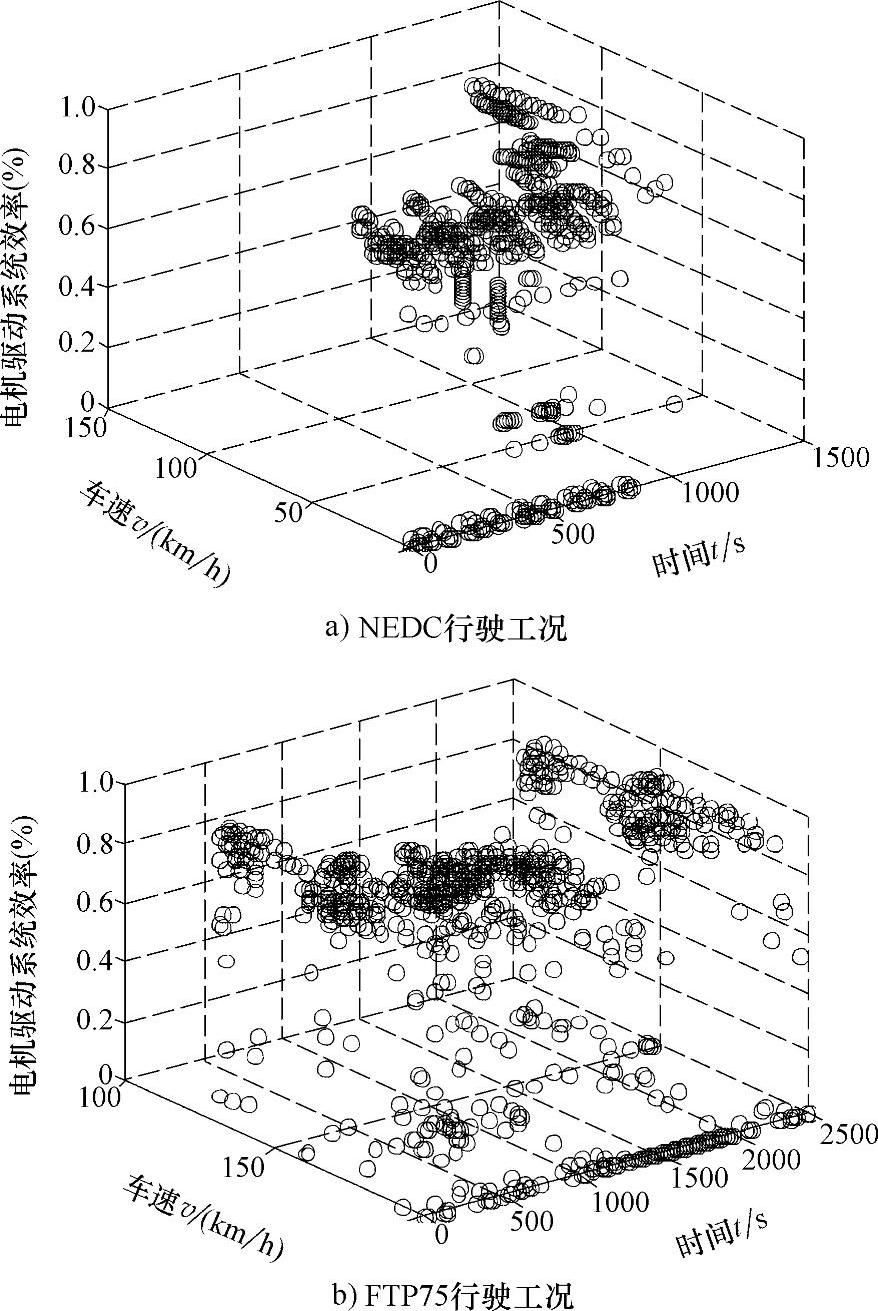
图3-18 电驱动系统效率的时域响应

式中,HFw为混合动力系统的动力混合程度;λice为发动机效率利用指数;ηbat为蓄电池效率;λem为电驱动系统效率利用指数;ηT为传动系统效率。
(1)发动机效率利用指数
混合动力汽车的发动机与传统汽车发动机的工作方式不同。混合动力汽车发动机在高负荷下工作能够提高热效率燃油经济性、降低排放和具有更高的比功率。另一方面,混合动力汽车发动机不需要像典型车用发动机那样有那么宽的工作范围。混合动力汽车采用的发动机在高负荷下工作比普通乘用车更能接近其峰值效率。在考察电驱动系统是否高效工作的同时,应保证发动机实际工作点对最佳效率工作区间的利用,同样以表3-2所示的国内某混合动力汽车参数为例,其不同工况下发动机效率区间利用率如图3-19所示。
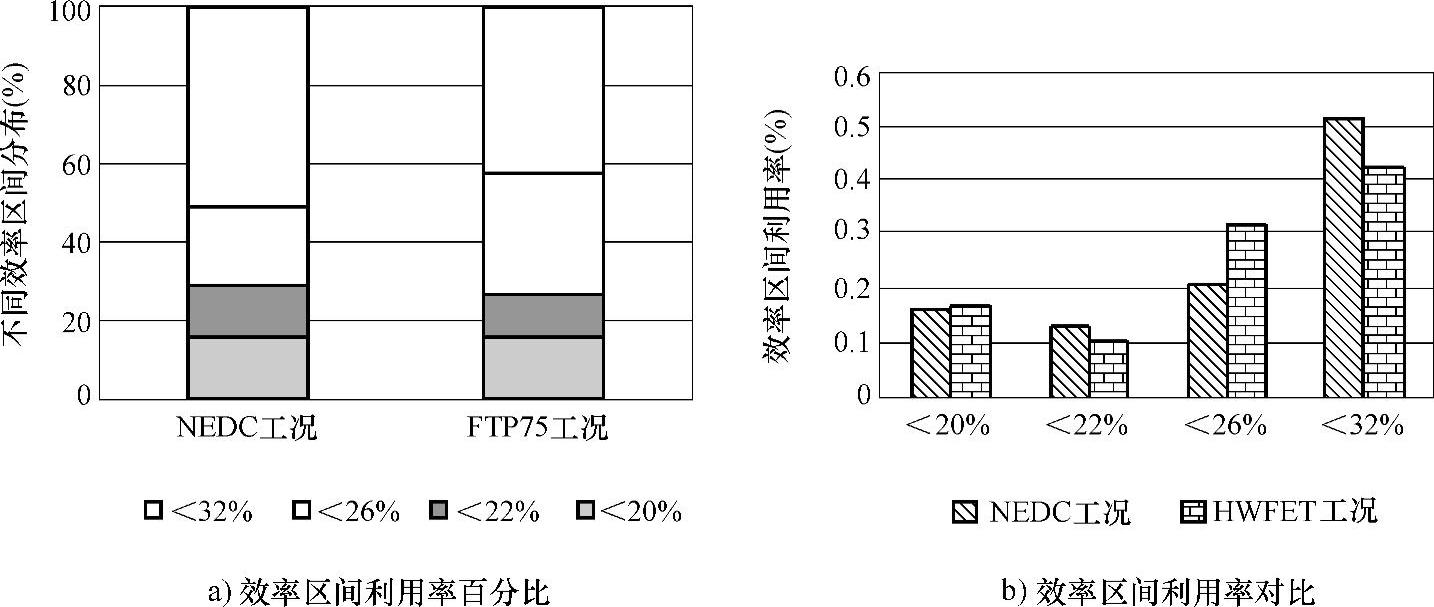
图3-19 不同工况下发动机效率区间利用率
从图中得到,NEDC工况下发动机效率高于22%的约占70.89%,效率高于26%的约占50.89%,FTP75工况下发动机效率高于22%的约占73.14%,效率高于26%的约占42.14%。从效率区间来看,NEDC工况下效率属于效率区间[22%,26%]的百分比小于FTP75工况约为10%,而效率区间[26%,32%]的百分比大于FTP75工况约为8%。
图3-20所示为不同行驶工况下发动机效率的时域响应。
通过式(3-19)和式(3-20)得到工况下效率区间的权重见表3-4。
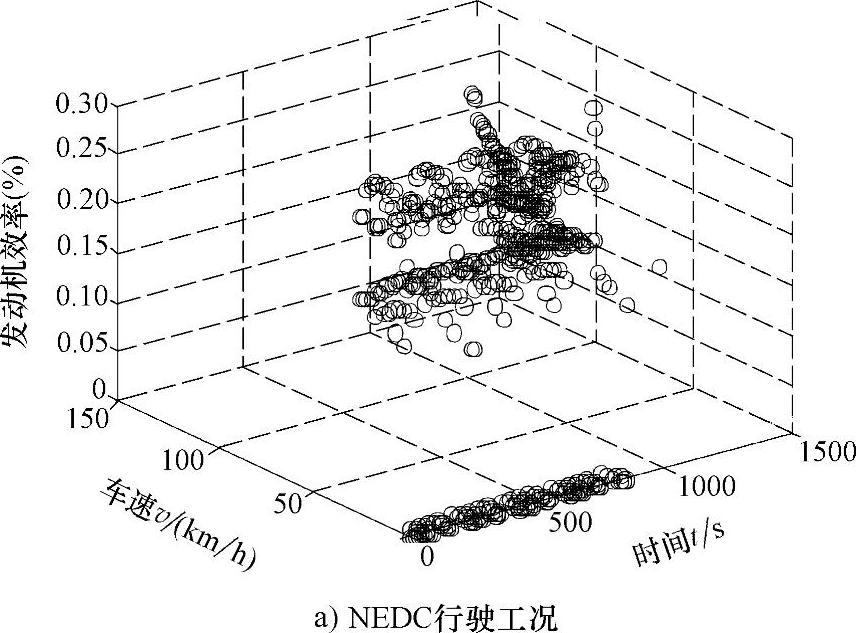
图3-20 不同行驶工况下发动机效率的时域响应
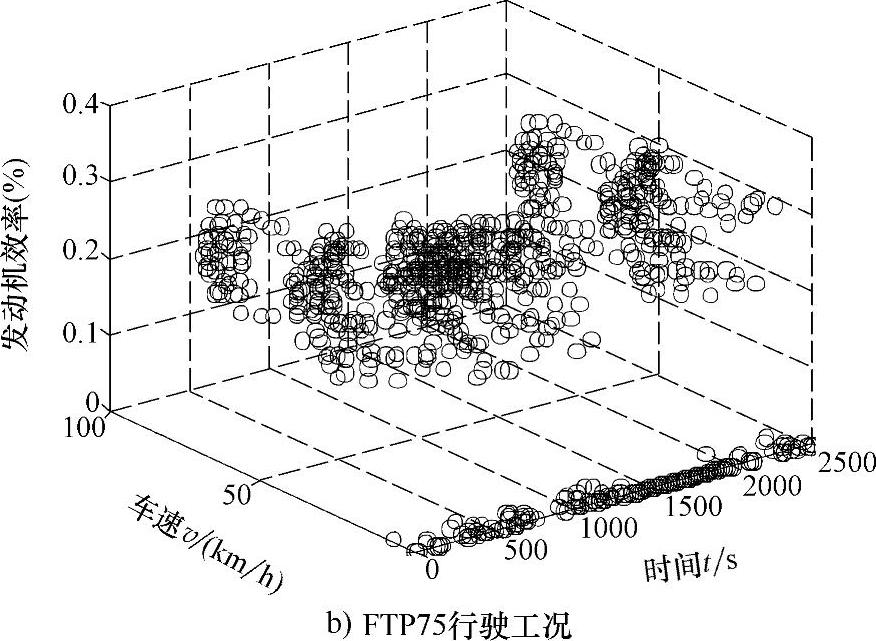
图3-20 不同行驶工况下发动机效率的时域响应(续)
表3-4 发动机系统效率区间权重

由式(3-18)可得,NEDC行驶工况下发动机效率利用指数为112.7,FTP75行驶工况下效率利用指数为94.7。
(2)动力蓄电池的效率分布
动力蓄电池的工作效率可以用能量效率表示,也可以用库仑效率表示。库仑效率定义为动力电池的输出电量和输入电量的比值。能量效率定义为输入能量和输出能量的比值,主要由充、放电内阻引起,它对于判断动力电池的最佳工作区具有重要意义。蓄电池的能量效率ηbat为

式中,ηbat为蓄电池的能量效率;Wdis为放电时输出电能;Wchg为充电时输入电能。
作为混合动力汽车重要的储能元器件,蓄电池常用能量效率表达其性能,为了综合表达某循环工况下蓄电池的效率,取蓄电池充电效率和放电效率的乘积为蓄电池的效率。
(3)传动系统的效率分布
传动系统的效率受到多种因素的影响,并随其所传递的转矩和转速而变化。典型行驶工况下的工作点比较集中,平均效率也比较稳定。建议取0.9~0.92来估算装备有级机械变速器传动系统的整车效率。传动系统的平均效率可以描述在某一驾驶循环工况下的效率及其工作状态。
(4)混合动力传动系统的混合程度
混合动力汽车动力的混合程度可以用混合比表示,定义为

式中,Pem为电驱动系统的最大功率;Pice为发动机最大功率。
由于汽车发动机和电机几乎不可能同时以最大功率工作,所以HF并不能反映汽车实际行驶工况下动力传动系统的工作情况。为了更加有效真实地反映混合动力传动系统的动力混合程度,以能量为参数,提出电能贡献率作为新的混合动力程度评价指标,定义为

从混合动力传动系统匹配指标的推导过程可以看出:把车辆的固有特性和实际使用条件相结合,反映了车辆具有的性能和实际使用效果。因此用HFw作为电驱动系统、传动系统、行驶工况匹配评价的综合指标,既能反映电驱动系统与使用工况的匹配程度,又能提示系统改善的潜力和途径。
(二)电驱动系统综合性能评价方法的研究
电驱动系统作为混合动力系统的关键部件之一,其性能评价不仅考虑是否满足整车动力性能的需求,而且考虑能否通过“主动”方式提高系统的能量效率。这些因素由于涉及的指标比较多,实际中有些可以通过实测和仿真给出定量值,有些只能通过向整车单位咨询得到一些定性的估计和判断,形成一个复杂的、多个相互冲突的、定性与定量指标并存的性能评价体系。因此在研究电驱动系统综合性能评价方法时,必须科学、客观、全面地反映电驱动系统的综合性能,体现电驱动系统的特点和发展趋势,同时考虑其可操作性。 1.电驱动系统综合性能评价方法的特点
混合动力汽车电驱动系统综合性能评价是一项涉及多因素、多目标、多层次复杂的系统工程,内容广泛而又错综复杂。它主要具有以下特点:
1)评价指标数量较多。由于混合动力汽车拓扑结构的多样性,为较全面反映电驱动系统的特点,电驱动系统不仅要求满足车辆使用要求,而且要求与传动系统匹配良好。
2)定量、定性指标相结合。电驱动系统是复杂的系统,并不是所有的指标都可以直接用数学模型来描述,有些定性指标必须依据系统工程有关理论和方法进行处理后方可量化。
3)各指标重要程度不一致。由于动力总成拓扑结构以及电驱动系统类型等不尽相同,因此反映出各评估指标的重要程度也不同,必须用科学的方法进行分析研究,确定电驱动系统各评价指标合理的权重。
4)指标取值模糊化。虽然各指标能够得到确定的值,但是有些指标边界比较模糊,没有明确的要求,同时由于对比电驱动系统标称值中数值的不同,直接比较评价值不能反映出电驱动系统的性能,只能依据模糊数学理论进行处理,确定指标的隶属函数,以便得出具体方案指标的隶属度。
对于这类在模糊的环境下进行多属性方案的决策方法,目前大都是先通过模糊算法集结各方案的模糊综合评价值,再运用不同种对模糊数进行排序的方法来对决策方案排序。如采用最大集和最小集法、乐观指标法、人工神经网络法、α-截集方法、解模糊方法等。但这些方法有的过于复杂,计算量大,难以实现;有的将集结成的非线性模糊数简化成线性模糊数或解模糊数,使得决策信息和结构在建模之前就被线性化或精确化,改变了实际问题模糊的特征。而模糊多属性决策模型将经典的多准则决策法、模糊优选法、模糊层次分析法、模糊综合评价法结合在一起,为解决同时具有定性与定量属性指标的多属性决策问题提供新的途径。图3-21所示为电驱动系统评价流程。
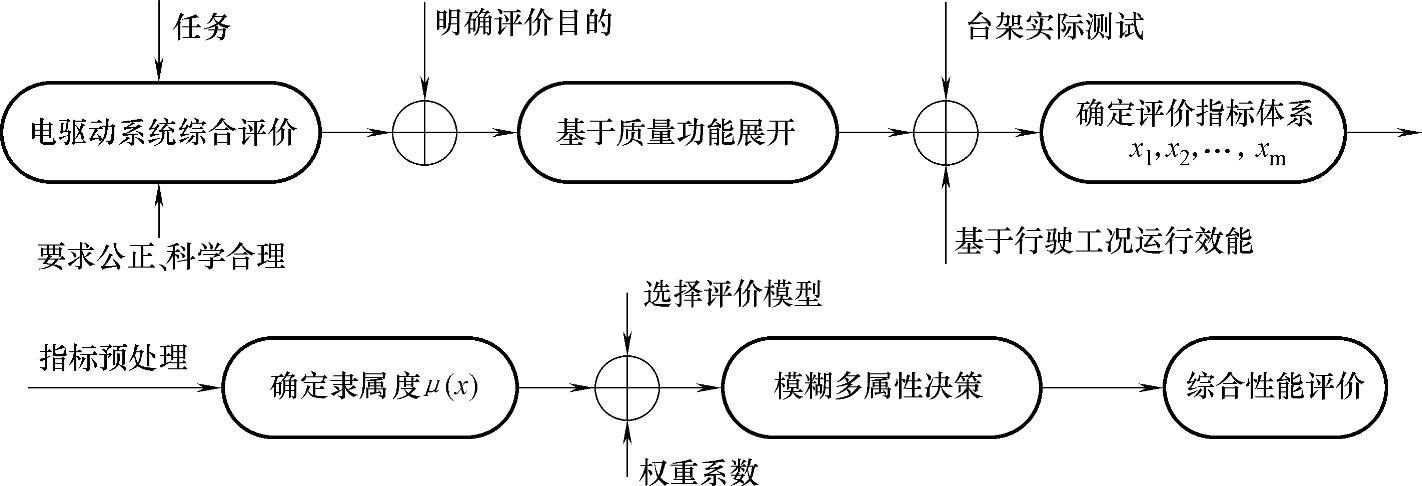
图3-21 电驱动系统评价流程
2.电驱动系统综合性能评价方法
根据前面的分析,电驱动系统的性能不仅涉及电气性能、动力性能、安全性能及可靠性等技术指标,而且涉及与整车匹配程度相关的效能指标。不同类型的电驱动系统考核的侧重点不同,不同工况下运行的混合动力汽车电驱动系统的效能指标也不相同。图3-22所示为电驱动系统评价指标。
电驱动系统通过测试平台自动测试结果和仿真结果都可以获得各评价指标精确值,但是由于电驱动系统研制单位与配套整车单位签订合同中合同值的不同以及不同类型电驱动系统设计的特殊性,为了能够准确度量各评价指标值在各方案中的满意度,需要针对合同指标值以及目前的技术水平确定各评价指标的隶属函数,利用模糊数集合间的测度工具实现电驱动系统综合性能的评价。
(1)评价指标隶属函数的确定
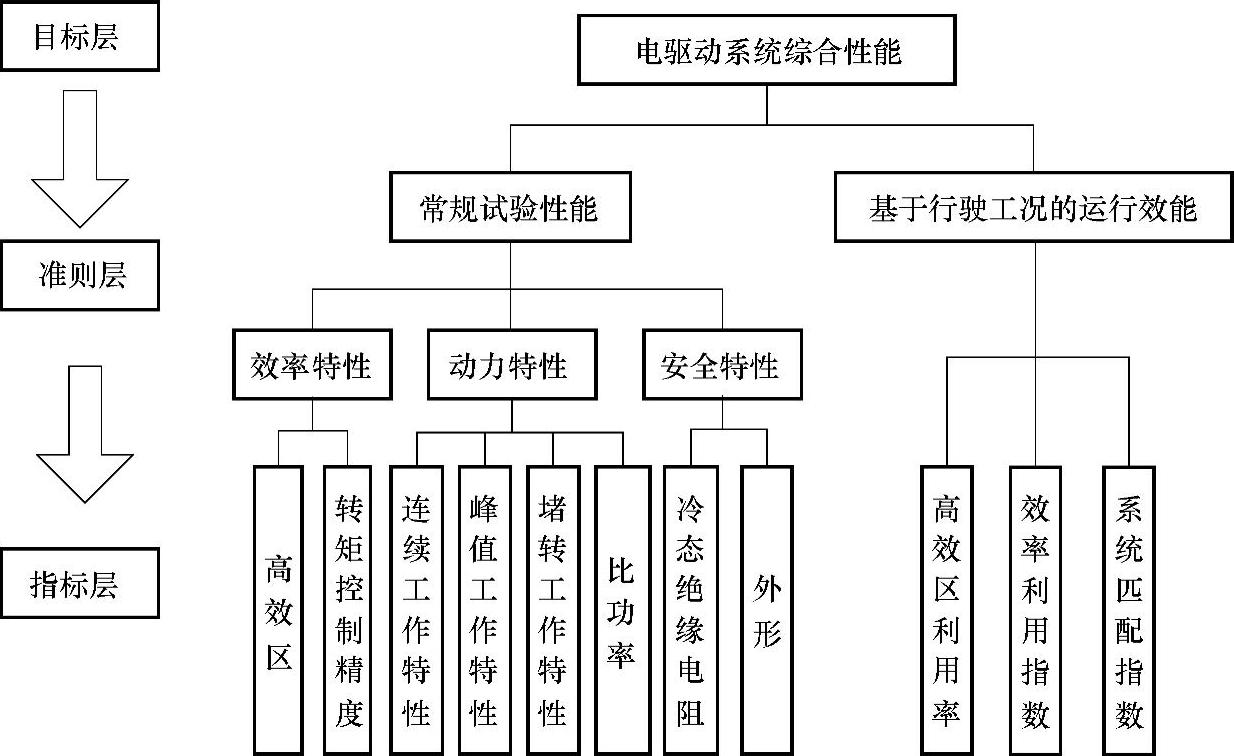
图3-22 电驱动系统评价指标
隶属函数的确定本质上是客观的,但又允许一定程度上的主观行为和人为技巧,主观行为应体现专家的经验、观点和某些公认的准则。针对研究对象的不同、研究问题性质的不同,隶属函数可以通过不同的方法来确定,如模糊统计法、三分法、二元对比排序法、专家评分法等。目前常用的隶属函数包括矩形分布、指数分布、正态分布、梯形分布、柯西分布、岭形分布等。
电驱动系统评价指标体系中既有效益型指标,又有成本型指标和区间型指标。对应隶属函数可分成三种形式:升型指标、降型指标和中间型指标,即指标的隶属度分别随指标值单调增加、单调下降或先增后降。通过对电驱动系统综合性能评价指标的特点进行研究分析,对属于升降型的指标,鉴于半岭形分布的良好的渐入渐出特性以及在大量实际运用中的良好性质,采用了以升半岭形模糊分布和降半岭形模糊分布为主的隶属函数;对属于中间型的指标,则选用正态型模糊分布。(https://www.daowen.com)
根据统计测试的13套电驱动系统,系统效率>80%的区域(高效区),其平均值为61.2%,高于此数值的点有7个,其平均值为73.9%,低于61.2%这一整体平均值的数值点有6个,其平均值为46.4%,高效区最高值为87%。因此,用以上四个值46.4%、61.2%、73.9%、87%模糊子集的代表值,采用岭形分布构造高效区隶属函数为

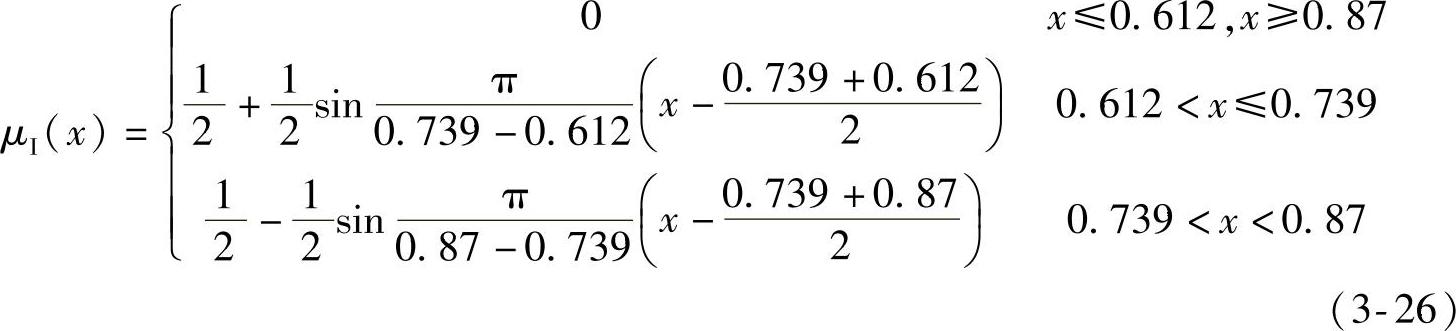
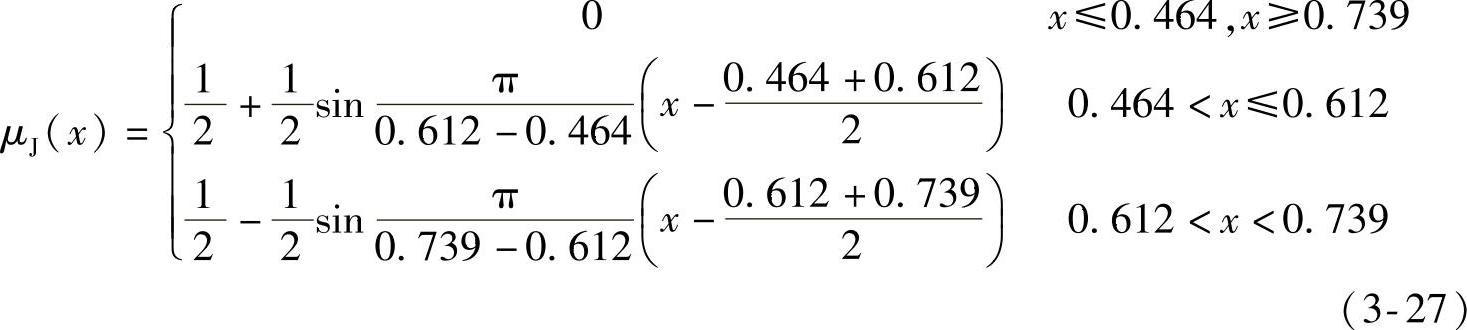

图3-23所示为电驱动系统高效区隶属函数示意图。
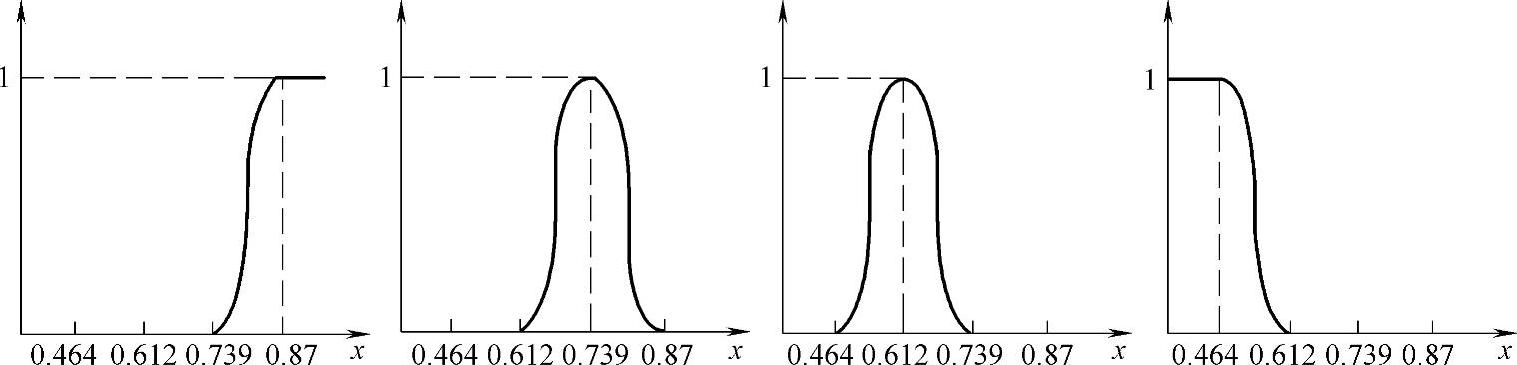
图3-23 电驱动系统高效区隶属函数示意图
由于实际中控制精度难以精确统计,合同中一般规定位于某区间即可,因此,控制精度隶属函数的确立主要依据合同指标用降半岭形模糊分布描述,其隶属度随指标值的增加而下降,即

式中,a1为期望值;a2为容许值。当不存在期望值或容许值时,可设a1=max(x),a2=min(x)。
图3-24所示为电驱动系统控制精度隶属函数示意图。
(2)动力特性指标隶属函数的建立
对于连续和峰值工作特性,按不同绝缘等级电机的温升限值用降半岭形模糊分布描述。目前常用电驱动系统大多为H级,温升限值为125K,由于峰值工作特性测试时间较短,统计16套电驱动系统最低温升不小于10K,因此其隶属度为
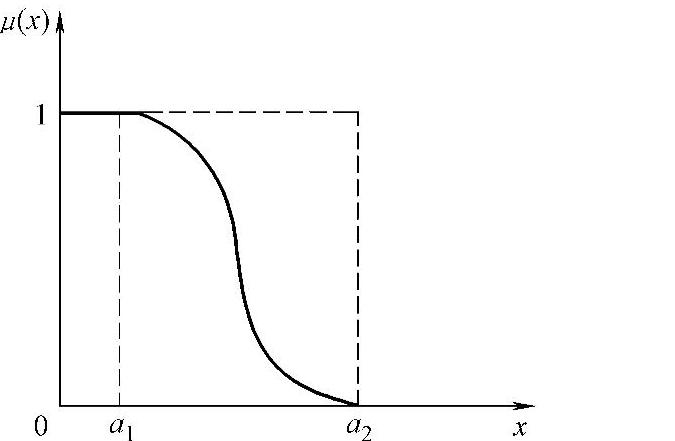
图3-24 电驱动系统控制精度隶属函数示意图

堵转工作特性主要是依据合同指标中规定的堵转转矩和额定转矩,通过升半岭形模糊分布描述,即

式中,T2为合同规定的堵转转矩;T1为额定转矩。
比功率指标比较特殊,一般情况大一些比较有利,但由于目前技术约束和实际使用的情况,它也无需太大,否则将增加成本。根据统计测试的16套电驱动系统,比功率取值区间大致为[0.5,1.33],以合同规定值x0为最理想值,其隶属函数由两条S形曲线组成,且高于x0的满意度比低于x0的满意度稍大,依此构造比功率近正态分布其隶属函数为
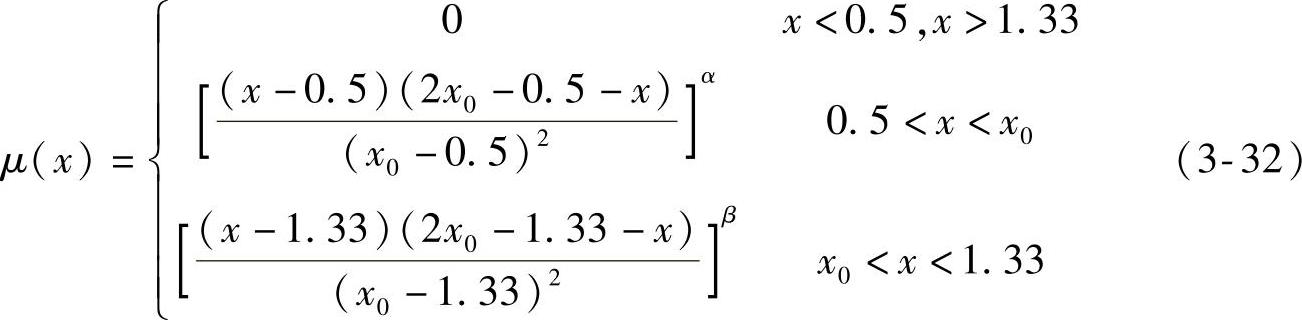
图3-25所示为比功率近正态分布图,取α=3,β=2。
(3)安全特性指标隶属函数的建立
从统计的16套电驱动系统冷态绝缘电阻测试来看,用500V兆欧表测试电机及控制器的绝缘能力基本都超过500MΩ,但也存在未达到合同规定值的情况,由于数据比较集中,因此根据合同规定值R确立隶属函数为
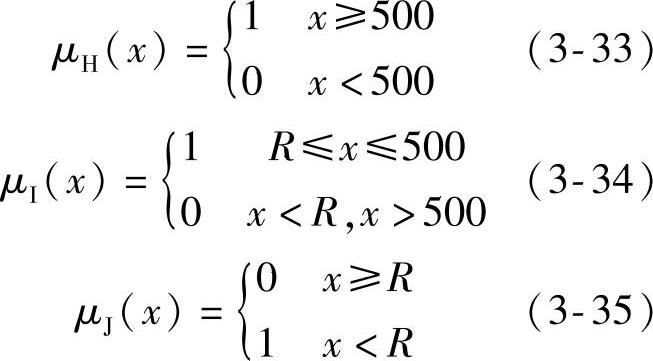
图3-26所示为冷态绝缘电阻隶属函数示意图。
外形评价指标合同中定义的指标值往往比较模糊,如一般要求重量小于某值即可,对于这类指标的描述应是一个渐变的过程,即在考虑误差测试范围内隶属度变化较慢,超出此区间越大该指标满意度越低,因此,定义部分幂函数分布隶属函数为
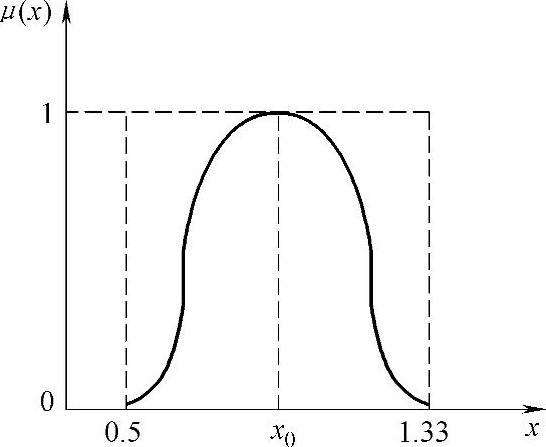
图3-25 比功率近正态分布图
式中,a2为合同中的规定值;[Δl,Δh]为允许的误差范围。
图3-26 冷态绝缘电阻隶属函数示意图
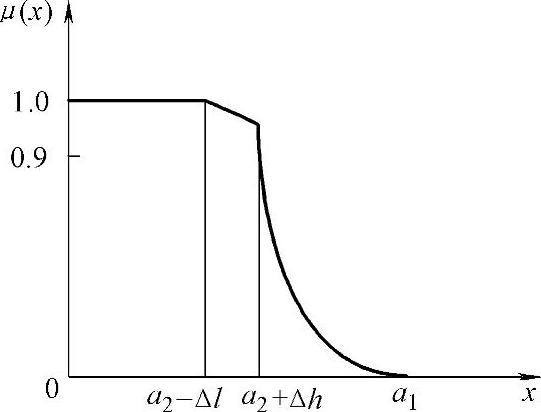
图3-27 比功率部分幂函数分布示意图
图3-27所示为比功率部分幂函数分布示意图。
(4)运行效能指标隶属函数的建立
运行效能指标由于属于新提出的指标,并没有数据可以参考,因此主要根据实际情况采用升半岭形分布描述其隶属函数。
3.基于兼容度准则综合性能评价方法
通过传统评价方法局限性分析可知,传统方法可以有效地表述同一类型电驱动系统的综合性能,但不能有效地表述不同类型电驱动系统的综合性能以及评价指标的变化趋势,而其单一的决策模式更加限制了评价方法的有效性,大大降低了准确性和可操作性。因此,结合电驱动系统评价方法的特点,改进距离测度工具和决策模式,提出更能够全面反映电驱动系统性能的评价方法。
(1)测度工具的改进
灰关联度也可以度量模糊集之间的接近程度。设X0={x0(k)k=1,2,…,m}为参考序列(系统特征序列),Xi={xi(k)|k=1,2,…,m}(i=1,2,…,n)为比较序列,则xi(k)在各指标下与x0(k)的关联系数为

式中,  为两级最小差;
为两级最小差;  为两级最大差;ρ为分辨系数,一般取ρ=0.5。
为两级最大差;ρ为分辨系数,一般取ρ=0.5。
定义比较序列Xi对参考序列X0的灰关联度ξ为

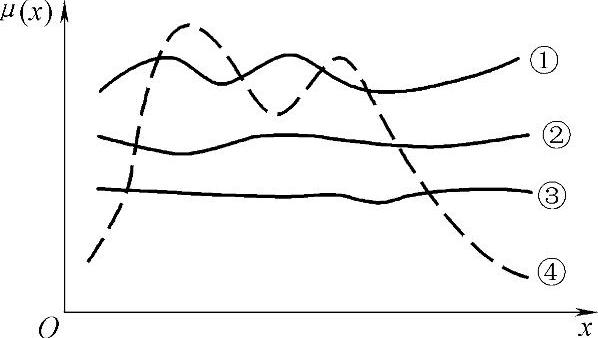
图3-28 灰色关联度示意图
灰色关联度用于趋势变化分析,它根据因素之间发展趋势的相似或相异程度来衡量因素间接近的程度。关联性实质上是曲线几何形状的差别,几何形状越相似,则变化趋势越接近,关联程度也越大。但关联系数公式就是参考点和比较点之间距离的一种函数,是对离散函数空间的一种接近测度,只能反映曲线几何形状的差别,但是不能反映曲线间的位置关系。图3-28所示为灰色关联度示意图,通过定性分析,曲线①、②的相似程度大于曲线①、④的相似程度,因此曲线①、②的关联度大于曲线①、④的关联度,但曲线①、②的相似程度与曲线①、③的基本相同,得出的关联度也应是相近的。但曲线②比③距①更近些,可见仅利用关联度并不能完全反映模糊集之间的接近程度。
从上面的分析可以看出,虽然距离测度在确定两曲线之间相似接近程度时存在缺陷,但它们在某种程度上却反映了曲线间的位置,能够表述同种类型电驱动系统评价指标的变化趋势,而灰色关联度又恰好可以反映曲线几何形状的相似性,能够表述不同类型电驱动系统评价指标的变化趋势。为了使评价结果符合现代决策规则,提高评价结果的可信度,使测度工具能够适应同种类型和不同类型电驱动系统评价,对于电驱动系统综合性能评价而言,由于其没有相对独立的参考序列标准,因此计算评价方案灰色关联度时按照传统的折中多属性决策,以理想解M+和M-为参考序列,方案Ai与理想解M+的关联度ζ+越大,方案越佳;方案Ai与理想解M-的关联度ζ-越小,方案越佳。假设方案Ai以隶属度μi从属于理想解M+,以1-μi从属于理想解M-,建立优化模型确定隶属度为

式中,μ=(μ1,μ2,…,μn)为系统的最优解向量。
令∂F/∂μi=0,可以得到

μi表示方案灰色关联度优属于理想方案的程度,μi越大,决策方案越优。
将这两种反映模糊集间接近程度的度量综合考虑,提出了“综合接近度”,定义为

式中,α为权重系数,可根据评价电驱动系统的具体类型确定。
(2)决策模式的改进
为了尽量减小决策模式的差异,提高评价方法的有效性,应建立一种从众多备择方案中产生优化方案的方法,实现现代科学的决策。根据多元统计分析理论,评价方案间的相关程度可通过等级相关系数表示为

式中,n为评价对象数;a(i)k为第k号对象在第i方案中的排序次数;h为通过不同决策方法得到的评价方案数。
评价方案的兼容度实质是指该评价方案与其他评价方案的等级相关系数的加权平均值,数学表达式为

式中,wj为第j个评价方案的权重,通常在对各个评价方案没有特别偏好时都取  。
。
(3)基于兼容度准则的评价方法
基于兼容准则的电机驱动系统综合性能评价方法就是从原h个评价方案{a(j)k}的基础上,生成一个新评价方案y={yk},使其兼容度最大,即

其物理意义:如果每一评价方案看成是n维欧式空间的一个点,求与h个评价方案有最大兼容度的评价方案可以归结为在n维欧氏空间中,求与h个点按欧氏距离二次方和达极小值的点。即解如下的极值问题

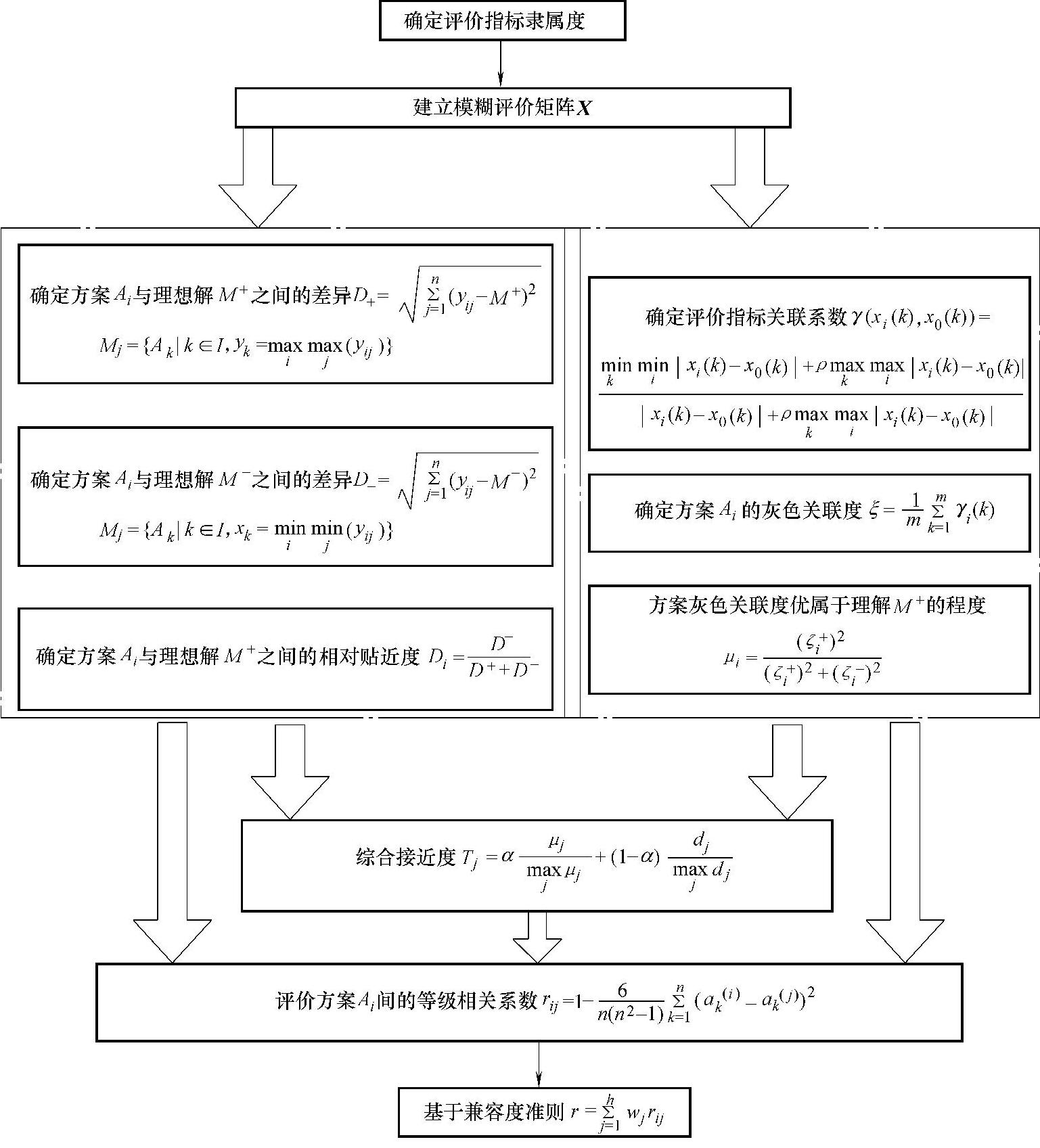
图3-29 基于兼容度准则的综合性能评价方法流程
由此可见,求与h个评价方案有最大兼容度的评价方案,等价于在n维评价方案空间中,寻找最小二乘意义下对h个点的最佳逼近点。
显然,若每种评价方法是独立的,某个电驱动系统方案的兼容度越大,则该电驱动系统评价结果的代表性越强,可靠性越高。图3-29所示为基于兼容度准则的综合性能评价方法流程。
4.电驱动系统综合性能评价
以表3-2所示的整车配套的两套电驱动系统为评价对象,通过实测的常规性能和仿真得到的运行效能,结合合同中的规定值以及上述不同评价性能指标隶属函数计算评价指标隶属度,对比评价同一电驱动系统在不同行驶工况下和不同电驱动系统在同一行驶工况下的综合性能。表3-5所示为电驱动系统综合性能评价指标值及其隶属度。
表3-5 电驱动系统综合性能评价指标值及其隶属度
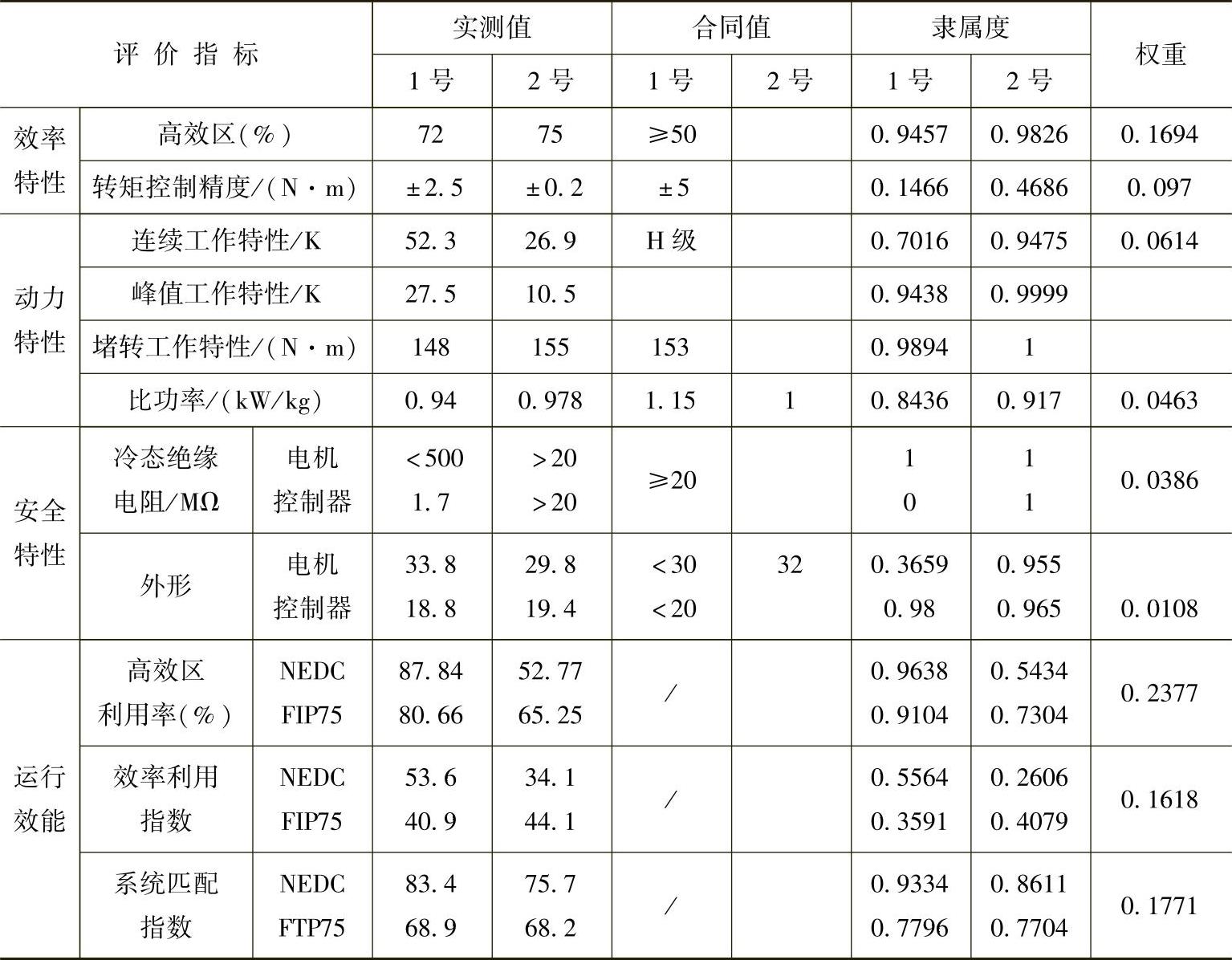
根据表3-5中的隶属度和权重,以1号电机NEDC行驶工况、1号电机FTP75行驶工况、2号电机NEDC行驶工况、2号电机FTP75行驶工况为四种情况,组成评价方案集A={A1A2A3A4},计算电驱动系统综合性能模糊评价矩阵为

图3-30所示为各评价方案综合性能对比图。从图中可以看出:
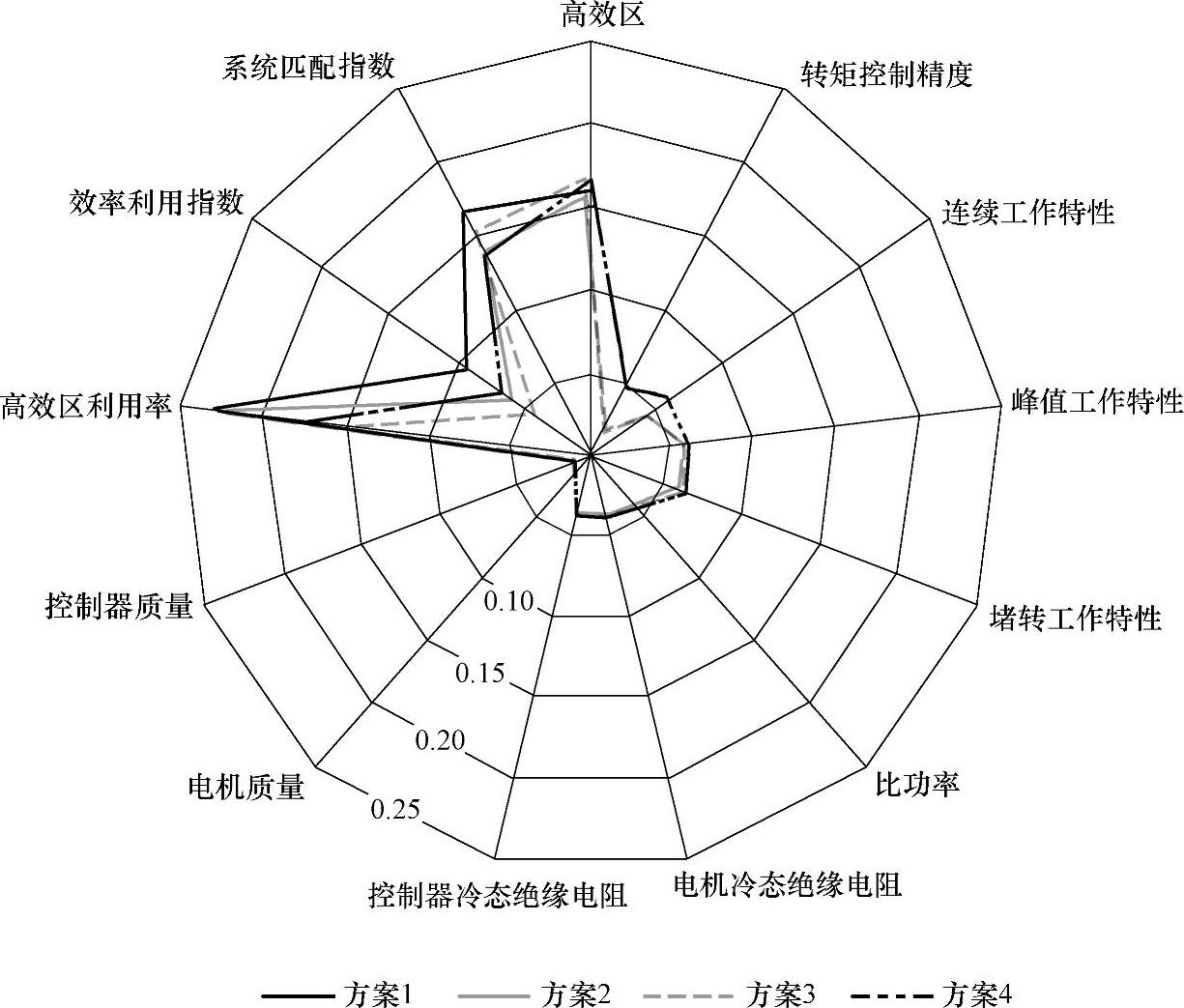
图3-30 评价方案综合性能对比图
1)NEDC行驶工况下,尽管1号电驱动系统高效区小于2号,但1号电驱动系统高效区的利用率大于2号,说明1号电驱动系统的效率区间分布更加适合,从效率利用指数可以看出1号电驱动系统的最高效率大于2号电驱动系统,2号电驱动系统的常规测试性能普遍优于1号,但由于运行效能权重较大,所以NEDC工况下1号电驱动系统综合性能应高于2号。
2)FTP75行驶工况下,尽管2号电驱动系统的高效区利用率低于1号,但2号电驱动系统效率利用指数大于1号,效率特性的分布与行驶工况更加匹配,同时2号电驱动系统的常规测试性能优于1号,其综合性能应优于1号电驱动系统。
按照传统模糊折中决策方法计算各方案与理想解之间的相对贴近度为
D=[0.684 0.584 0.331 0.522]
方案灰色关联度优属理想解的程度为
μ=[0.505 0.436 0.513 0.544]
方案与理想解之间的综合接近度为
T=[0.964 0.828 0.714 0.881]
各种决策方法测度算子不同,方案排序名次也不同。表3-6为根据各种决策方法确定的方案排序名次。
表3-6 方案排序名次
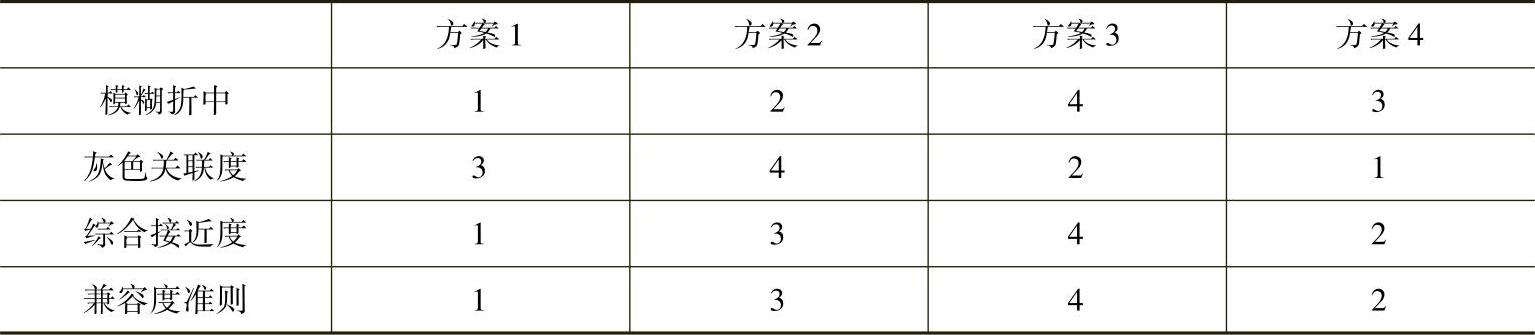
基于兼容度准则的电驱动系统综合性能评价方法对评价方案的结果为方案1>方案4>方案2>方案3,与分析的结果相一致,验证了评价方法的有效性,为电驱动系统性能的改进提供了参考依据。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






