1.电动汽车的动力性
电动汽车动力性能仍然通过加速性能、爬坡性能和最高车速性能三个指标来评定。
选择的电机功率应不小于在平坦良好路面上车辆以最高车速行驶时阻力功率之和,即电动汽车以最高车速行驶消耗的功率为

根据GB/T 18385—2005《电动汽车 动力性能试验方法》的规定,电动汽车的最高车速有两项不同的标准特征值:
一是1km最高车速,即电动汽车能够往返各持续行驶1km以上距离的最高车速的平均值。
二是30min最高车速,即电动汽车能够持续行驶30min以上的最高平均车速。
其动力平衡图如图2-10所示。
电动汽车以某一车速爬上一定坡度消耗的功率为

式中,v为电动汽车行驶速度。
电动汽车在水平路面上加速行驶消耗的功率为

式中,δ为汽车的旋转质量换算系数。
汽车的加速能力用汽车原地起步的加速能力和超车加速能力来表示。通常采用汽车加速过程中所经过的加速时间和加速距离作为评价汽车加速性的指标。
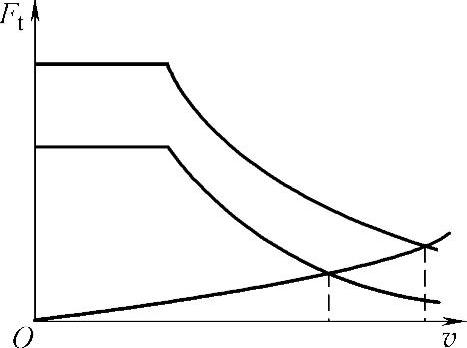
图2-10 电动汽车动力平衡图
总之,电动汽车驱动电机的最大功率应能同时满足汽车对最高车速、加速时间以及爬坡度的要求,所以电动汽车电机的额定功率为

若要满足车辆的爬坡性能要求,则电动汽车行驶方程为

式中,Fg为坡道阻力,Fg=Mgsinα;Fr为滚动阻力,Fr=Mgfrcosα;α为坡道角度。
车辆爬坡度的计算公式为

根据电机转矩可以确定电动汽车的驱动力,然后利用电机转速与汽车行驶速度之间的关系计算车速v。电机转速与汽车行驶速度之间的关系式为

电动汽车的驱动力Ft为

式中,Tp为驱动电机转矩。
2.电传动车辆的功率平衡
汽车行驶时,不仅驱动力和行驶阻力互相平衡,驱动电机功率和汽车行驶的阻力功率也总是平衡的。就是说,在汽车行驶的每一瞬间,驱动电机发出的功率始终等于机械传动损失功率与全部运动阻力所消耗的功率,汽车运动阻力所消耗的功率有滚动阻力功率Pf、空气阻力功率Pw、坡度阻力功率Pi和加速阻力功率Pj。
将汽车行驶方程式经单位换算整理为汽车功率平衡方程式(式中功率单位为kW)为


利用功率平衡图求最高车速时,PM应取驱动电机连续功率曲线上的点求取加速度。求最大爬坡度时和加速能力时,PM可以取持续1~5min工作的功率曲线上之点。
其计算公式为


图2-11所示为是一款电动货车实际的功率平衡图,其中一档2倍过载曲线能够实现车辆瞬间加速和上大坡的实际工况需求。
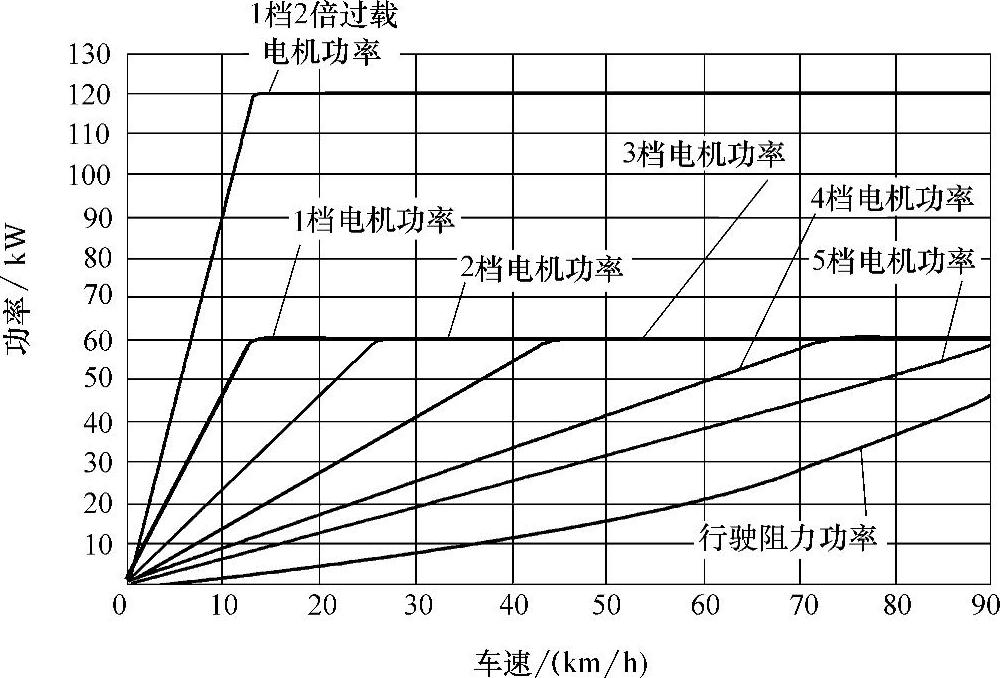
图2-11 电动货车功率平衡图
3.电动汽车的制动性能
汽车的制动性能指汽车能在短距离内停车且维持行驶方向稳定性和下长坡时能维持一定车速的能力。车辆的制动性能显然是影响车辆安全的最重要特性之一,它直接关系到汽车的行驶安全。一些重大交通事故往往与制动距离太长有关。所以,具有良好的制动性能,是汽车行驶安全的重要保障。影响汽车制动性能的因素主要有汽车的制动机构、人体机能以及路面的状况等。另外,在市区运行时,大量的能量消耗在制动中,因此,越来越多的电驱动系统也被引入车辆的传动系统,利用再生制动系统增进了车辆的效率,降低车辆的能耗。
(1)制动力
由于制动片紧压在制动盘上,在制动盘上产生了摩擦力矩。该制动力矩使轮胎与地面在接触表面上产生制动力,可表示为

制动力随着制动力矩的增大而增大,当制动力到达轮胎与地面间的附着力所能支持的最大制动力时,即使制动力矩继续增大,制动力也不再增大。这一受制于附着力的最大制动力可表达为
Fbmax=μbW (2-46)
式中,μb为轮胎与地面间的附着系数;W为车轮的垂直载荷。与牵引情况相似,附着系数随轮胎的滑移而变化,在轮胎滑移率为15%~20%的范围内显示最大值,而后稍呈衰减降至100%的滑移处。
(2)制动力分配
图2-12所示为平坦路面上车辆制动时作用于车辆上的力。与制动力相比,滚动阻力和空气阻力很小,因此在图中忽略。a是车辆制动时的负加速度,可表述为

式中,Fbf和Fbr分别为作用于前后轮上的制动力。
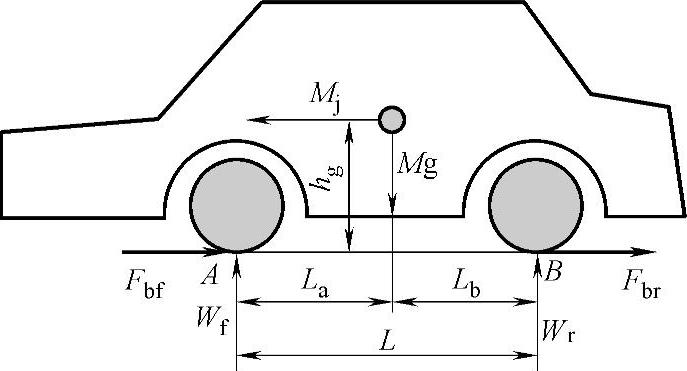
图2-12 制动时汽车的受力图
最大制动力受限于轮胎与地面之间的附着力,同时正比于作用在轮胎上的铅垂方向的负荷。因而,由制动力矩产生的实际制动力也应正比于铅垂方向的载荷,其结果是前后轮同时获得了最大制动力。制动期间,载荷将从后轴转移到前轴。考虑前后轮与地面接触点A和B的力矩平衡关系,可得作用在前后轴上的铅垂方向的载荷Wf和Wr,分别为

 (https://www.daowen.com)
(https://www.daowen.com)
式中,a为车辆制动时的负加速度。
前后轴上的制动力分别正比于铅垂方向的载荷,于是可得

由式(2-48)和式(2-50)联立求解可得作用于前后轴上的理想制动力,如图2-13所示。其中,a表示车辆以附着系数μ在路面上行驶获得的最大加速度。理想制动力分布曲线(简称为I曲线)是非线性的双曲线。若要在任何路面上都能同时使前后轮停止,则作用于前后轮上的制动力必须完全与这一曲线相符。
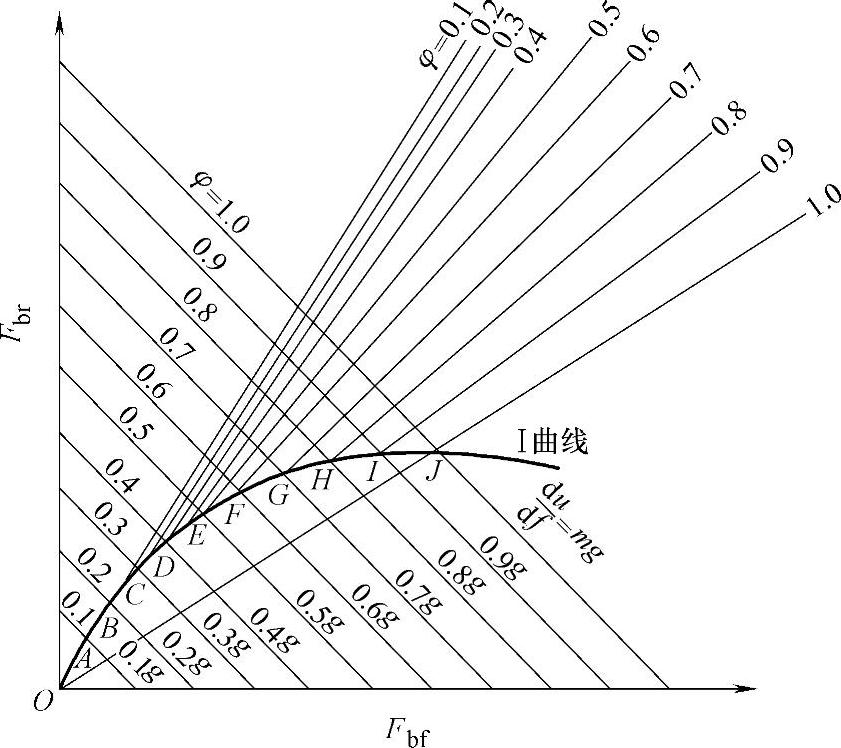
图2-13 作用于前后轴上的理想制动力分布曲线
在车辆设计中,作用于前后轴上的实际制动力分布通常被设计为一个不变的线性比例关系。这一比例关系为前轴上的制动力与车辆总制动力之比,即

式中,Fb为车辆的总制动力(Fb=Fbr+Fbf)。而前后轴上的实际制动力随β而变化,故可将它们表示为
Fbf=βFb (2-52)
和
Fbr=(1-β)Fb (2-53)
于是可得

图2-14所示为理想和实际制动力分布曲线(分别标记为I曲线和β曲线)。
显然,它们仅有一个交点,即仅在此情况下前后轴被同时抱死,称此点处的附着系数为同步附着系数,所对应的制动减速度称为临界减速度。这一交点表明了一个特定的路面附着系数μ0。将式(2-50)中的  用μ0替代,即得
用μ0替代,即得

从而由式(2-55)可导出


车辆制动时,当附着系数小于μ0时(对应于β曲线位于I曲线下方的区间),前轮将首先抱死;相反,当路面附着系数大于μ0时(对应于β曲线位于I曲线上方的区间),则后轮首先抱死。
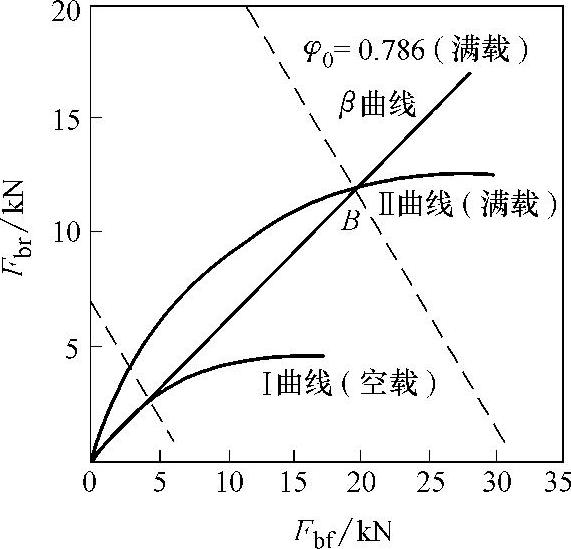
图2-14 理想和实际制动力分布曲线
当后轮首先抱死时,车辆将丧失方向的稳定性,后轮胎承受横向力的能力降低到零。此时,侧风、路面的侧倾或离心力等都会导致产生侧滑力矩,甚至使车头调转;前轮先抱死将会引发方向失控,驾驶人不可能再进行有效的操纵。然而,应该指出,抱死前轮不会引起方向上的不稳定性,这是因为每当前轮发生侧向运动时,由于车辆的惯性力将对后轴偏转中心产生自校正力矩,从而有助于使车辆返回到直线路径。
4.电动汽车的燃料经济性
纯电动汽车和混合动力汽车的燃料经济性能计算有所不同,下面分别进行讨论。
(1)纯电动汽车
纯电动汽车的燃料经济性是指在动力蓄电池完全充电状态下,以一定的行驶工况能连续行驶的最大距离,单位为km。燃料经济性有能量消耗率、比能量消耗率和能量经济性三个指标。
1)能量消耗率(Energy Consumption)。电动汽车经过规定的试验循环后对动力蓄电池重新充电至试验前的容量,从电网上得到的电能除以行驶里程所得到的数值,单位为W·h/km。
2)比能量消耗率。电动汽车能量消耗率与整车质量的比值,单位为W·h/(km·t)。
3)能量经济性。电动汽车以各种预定行驶规范达到的续驶里程与蓄电池再充电恢复到原有的充电状态所需要的交流电能量之比,单位为km/(kW·h)。
对于纯电动汽车的等速行驶时,其功率需求为
式中,PB为电动汽车行驶需求总功率(kW);P∑(v)为车辆行驶驱动功率;ηm(nm、Pm)为电机驱动系统效率;ηt为传动系统效率。
其动力系统时间T内的能量消耗为

式中,EB为能量消耗(W·h);UB(PB)为驱动系统母线电压;IB(PB)为驱动系统母线电流。
其续驶里程为

对于按照某一工况行驶的纯电动汽车,其续驶里程为

其功率需求和能量消耗同样可以按照式(2-58)和式(2-59)计算。
在上述公式基础上可以进行能量消耗率、比能量消耗率和能量经济性的计算,但是在计算时,还需要考虑充电效率ηcha。
(2)混合动力汽车
对于混合动力汽车,由于车辆行驶的能量不仅来自于电池组,还消耗了车载燃料,因此其燃料经济性的评价需要考虑两个方面:燃料消耗量和外界输入电量。为统一标准,采用百公里运行成本评价,即
Chev=CfuelQs+CelectEGrid (2-62)
式中,Chev为混合动力汽车百公里运行成本[元/(100km)];Cfuel为燃油价格(元/L);Celect为工业用电价格[元/(kW·h)];Qs为百公里燃油消耗率;EGrid为电池组百公里电网充电电量均值[kW·h/(100km)]。
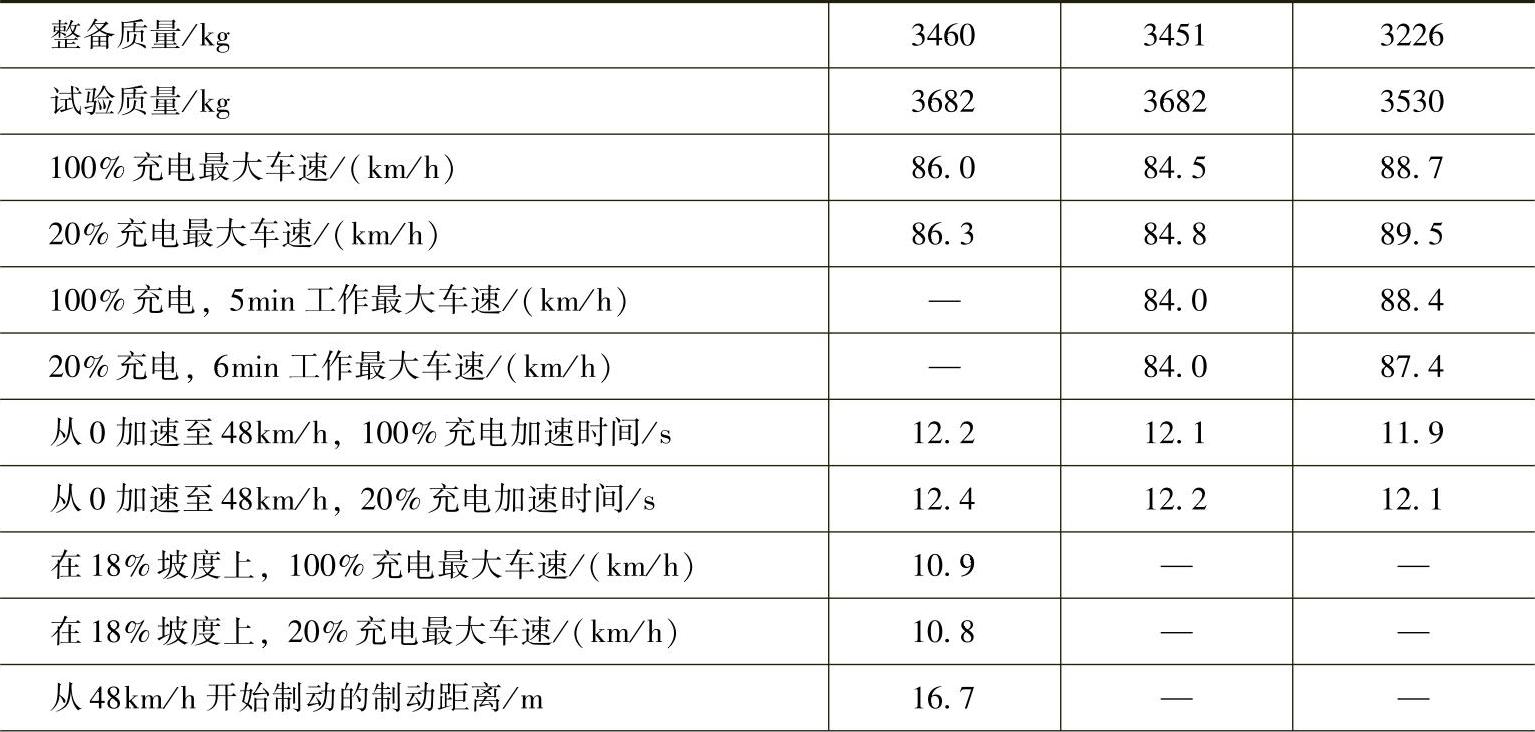
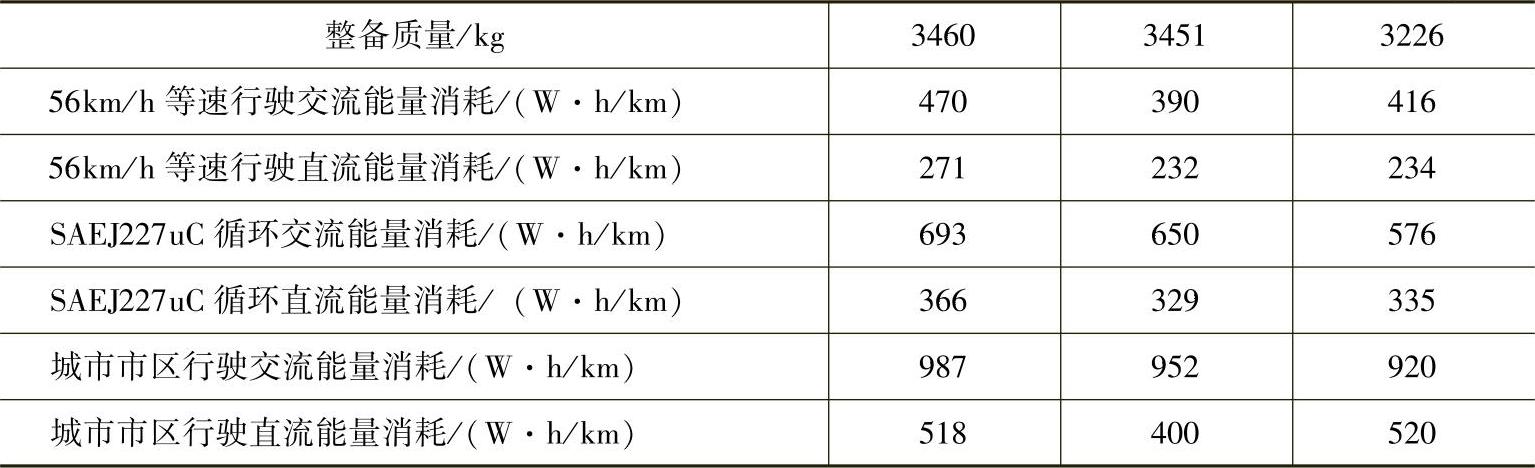
表2-4所示为美国G型厢式电动汽车的实验数据。
表2-4 G型厢式电动汽车实验数据
(续)
单位里程的能耗e(kW/km)在某些文献中称为电动汽车的效率。在另外一些文献中,将电动汽车的能量经济性定义为电动汽车以各种预定行驶规范达到的续驶里程与蓄电池再充电恢复到原充电状态所需要的交流电能量之比,即

设电动汽车行驶时单位里程能耗为e,电动汽车总质量为M(t),电动汽车行驶的比能耗为e0,则有

e=e0M (2-64)
设电动汽车上动力蓄电池组充满电的总能量为E,由电动汽车的续驶里程为

实际情况并不像计算的那样简单,由于空气阻力消耗的能量与质量无关,同时蓄电池存在放电效率、放电深度、放电电流不同的问题,还有自放电问题(有的蓄电池甚至每天自放电率高达10%以上),均影响动力蓄电池组的输出总能量。另外,行驶规范的差别等因素都将影响电动汽车的续驶里程,因此,式(2-65)为电动汽车的续驶里程的近似估算。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





