1.恒液位控制的目标及基本流程图
V形滤池一般采用堰口自由出流,保证滤池各单元格的进水流量基本相同。同时,V形滤池在运行时,各单元格的运行水位保持相同,即采用恒水位的等速过滤,这样能保持滤层孔隙内水流流速基本恒定或缓慢递增,是保证出水水质的最好方法。由于进水阀全开,瞬时进水量上下波动比较大,所以就需要通过控制滤后水阀的开启度,以达到滤池水位的恒定。利用超声波液位计实时监测水位的变化,并传送给PLC。PLC利用PID控制指令的PID算法确定出滤后水阀的开启度,再以此控制滤后水阀,使滤池水位保持相对恒定。图3-61所示为滤池基本的工艺结构。
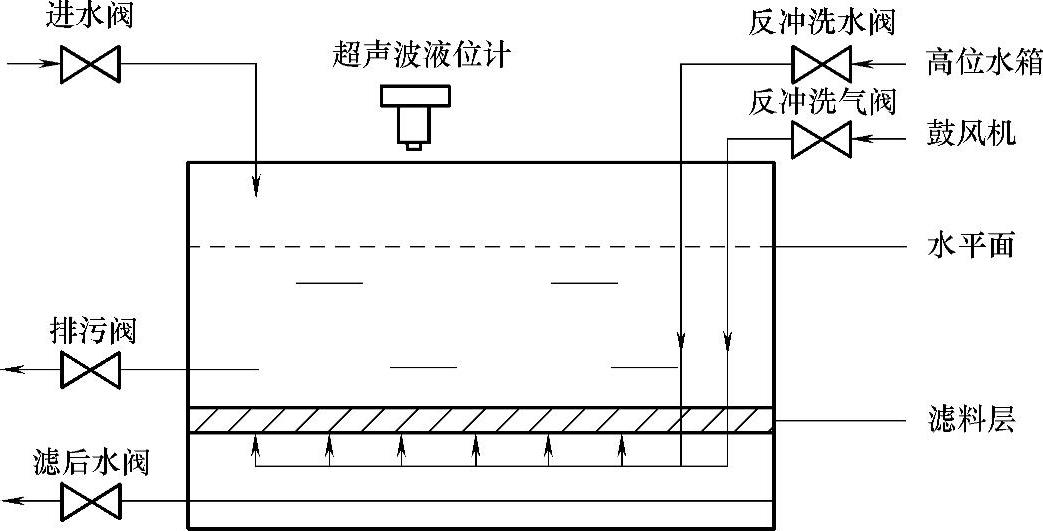
图3-61 滤池基本的工艺结构
滤池水位控制流程如图3-62所示。
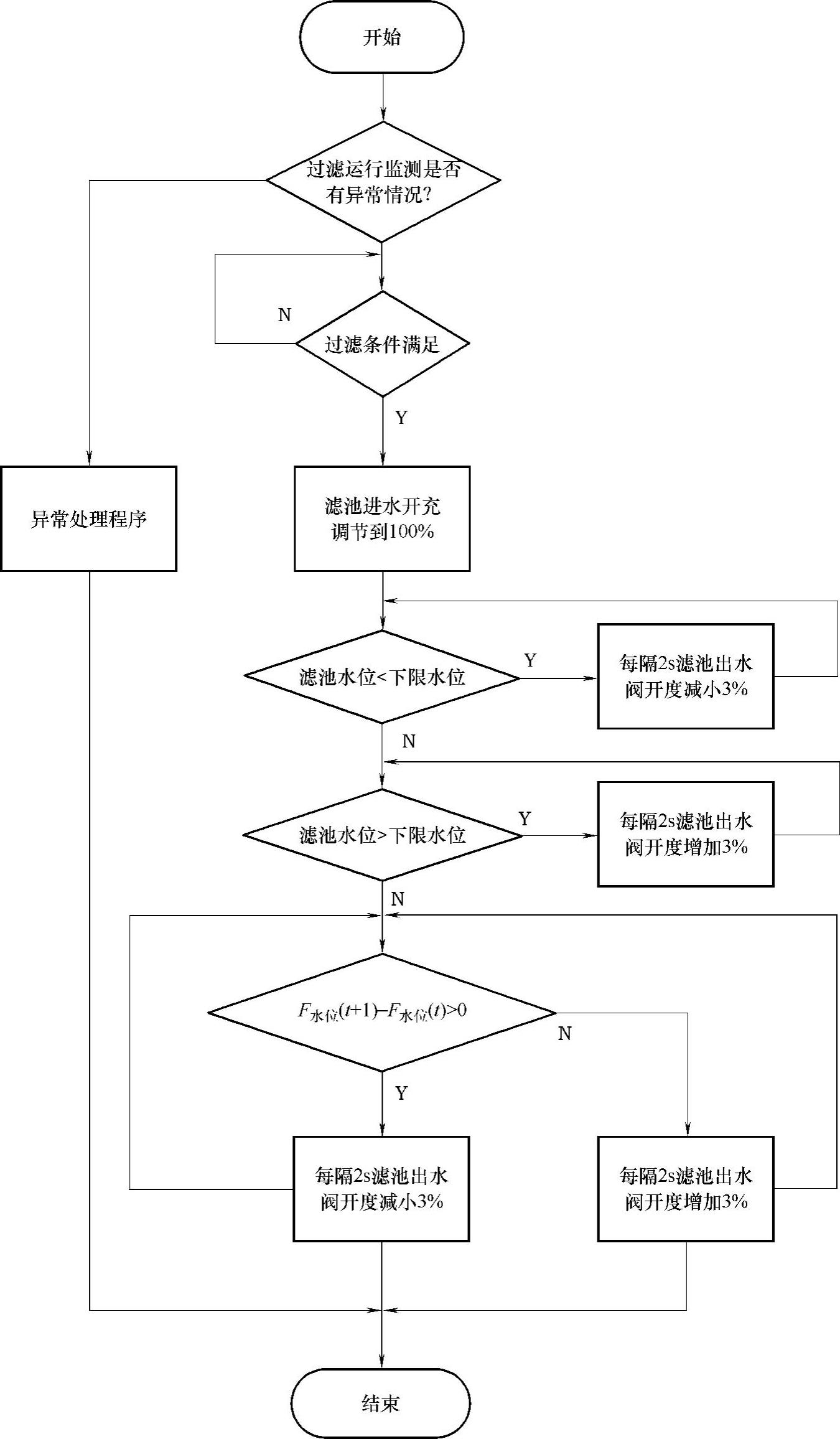
图3-62 滤池恒液位控制流程图
2.恒液位控制的程序实现
首先,从监控界面中读取恒水位设定值(comwrite[5]),如果该设定值低于4000,则认为恒水位设定为4000,如图3-63所示。

图3-63 读取恒水位设定值梯级
如图3-64所示,分别对该恒水位设定值加减100作为水位的上下限。如果水位不在±100的范围内,则进行恒水位控制,如图3-64所示。
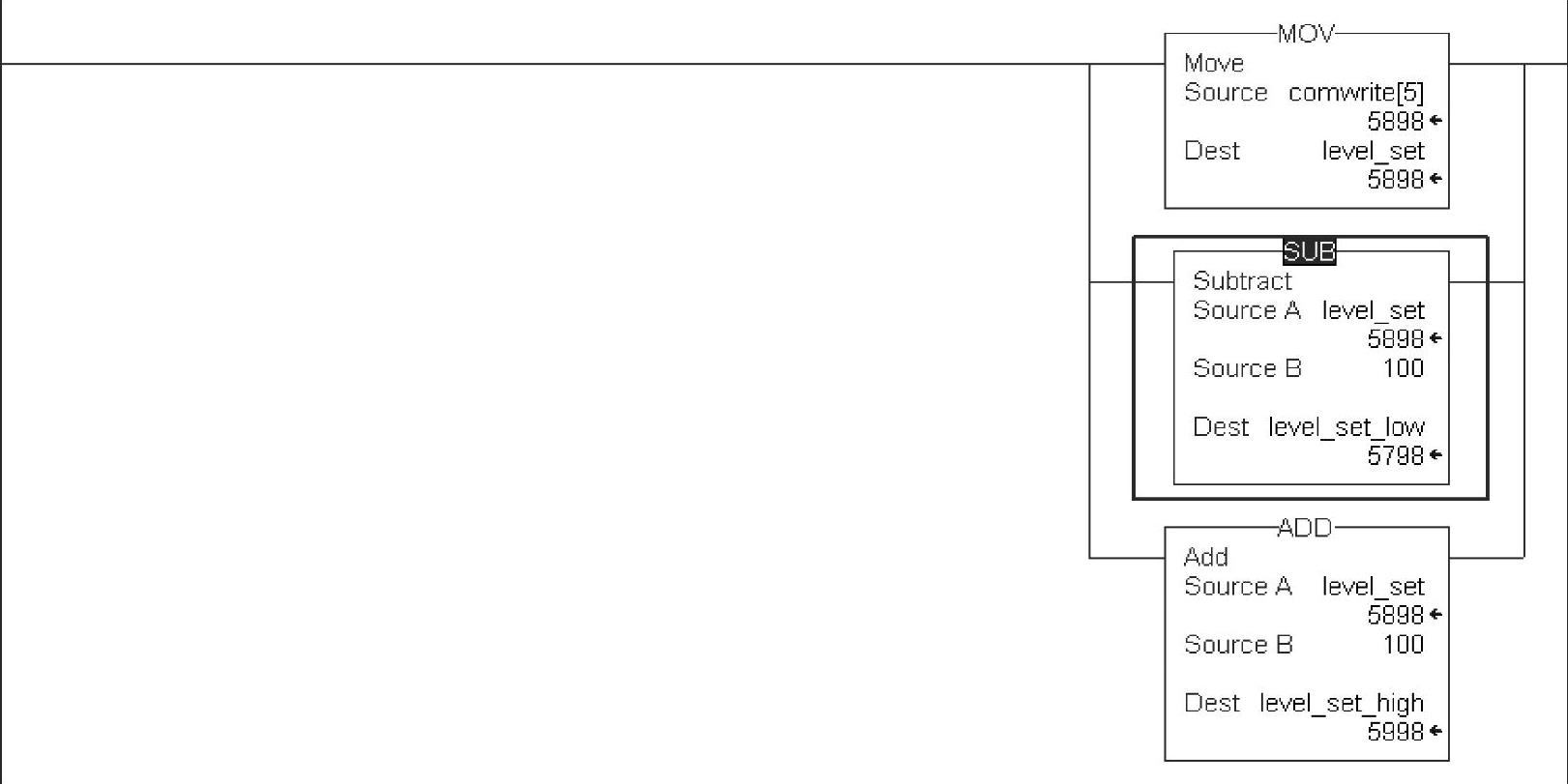
图3-64 设定高低水位梯级
当水位高于设定的高液位或低于低液位时,会产生高低液位报警,如图3-65所示。
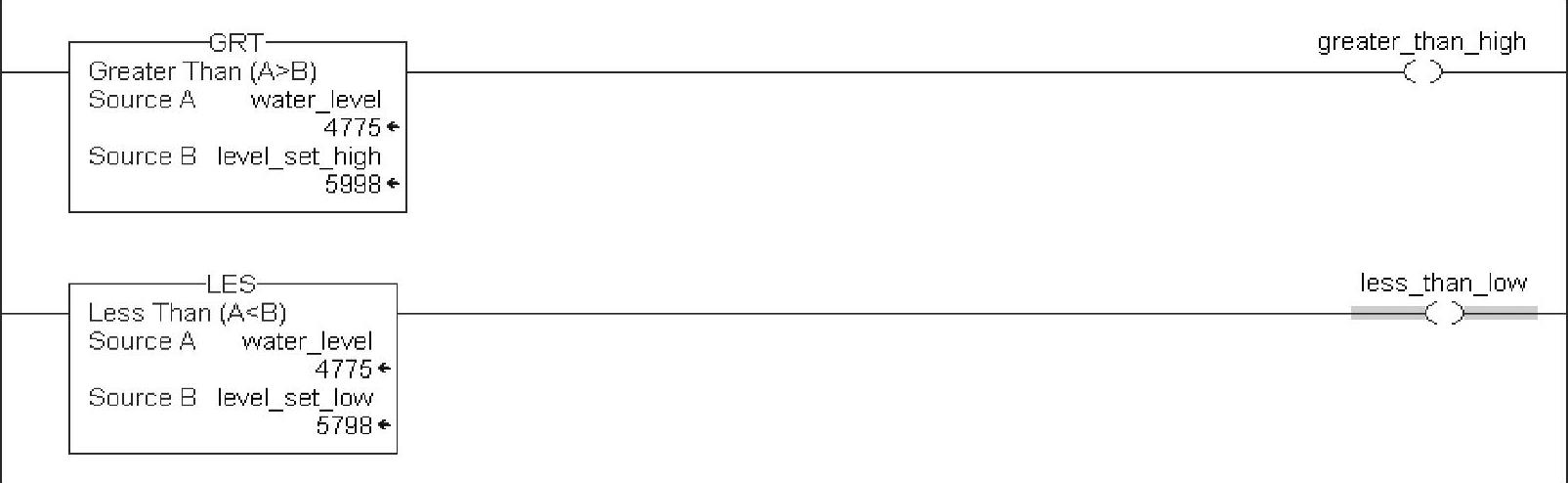
图3-65 高低水位报警梯级
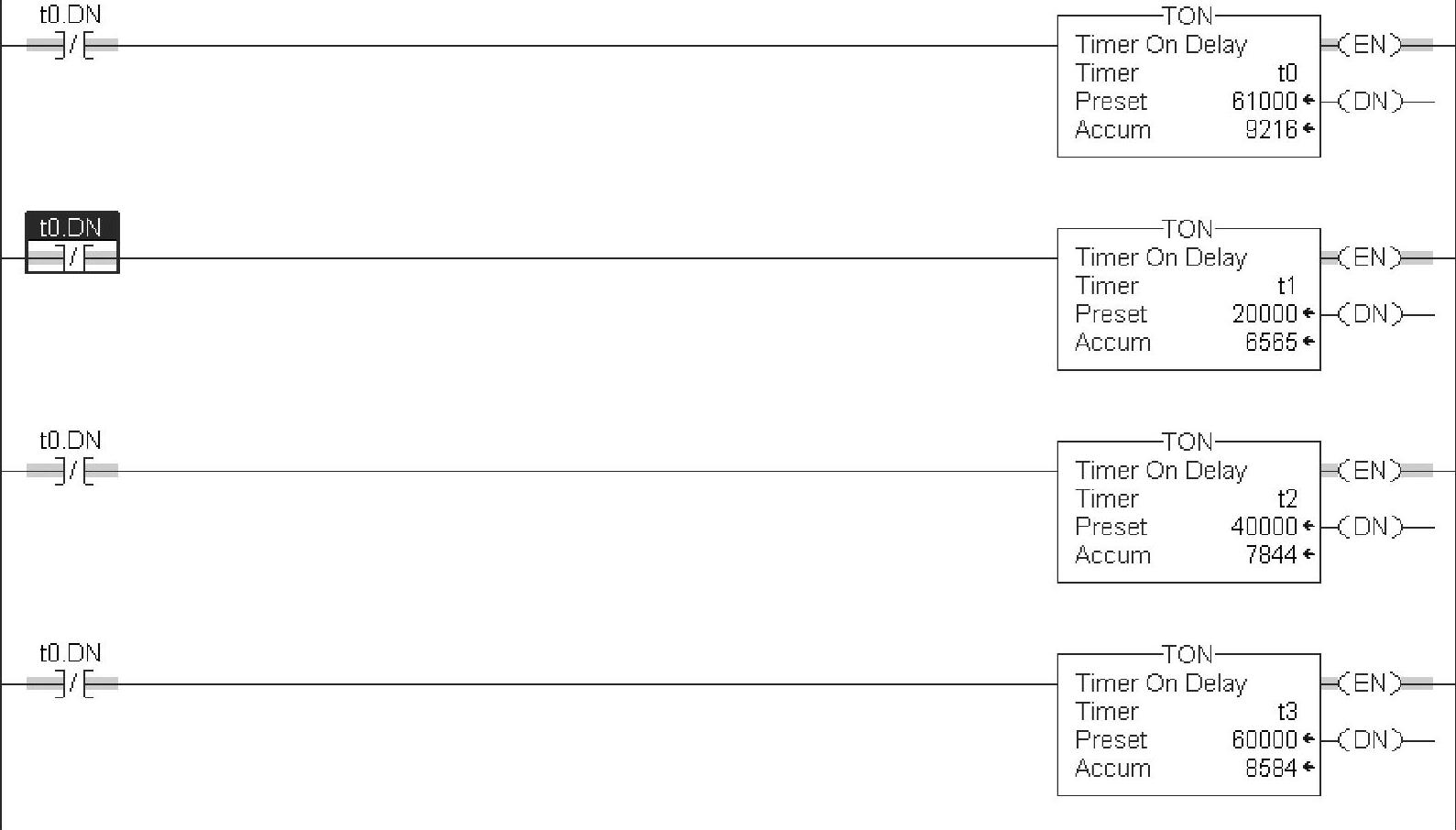
以61s为一个周期,用T0计时器控制其他三个计时器。每隔20s触发一个计时器,如图3-66所示。
 (https://www.daowen.com)
(https://www.daowen.com)
图3-66 液位采集计时器梯级
再用这3个计时器的完成位实现每隔20s就采集一次液位,分别放在water1、water2和water3中,如图3-67所示。
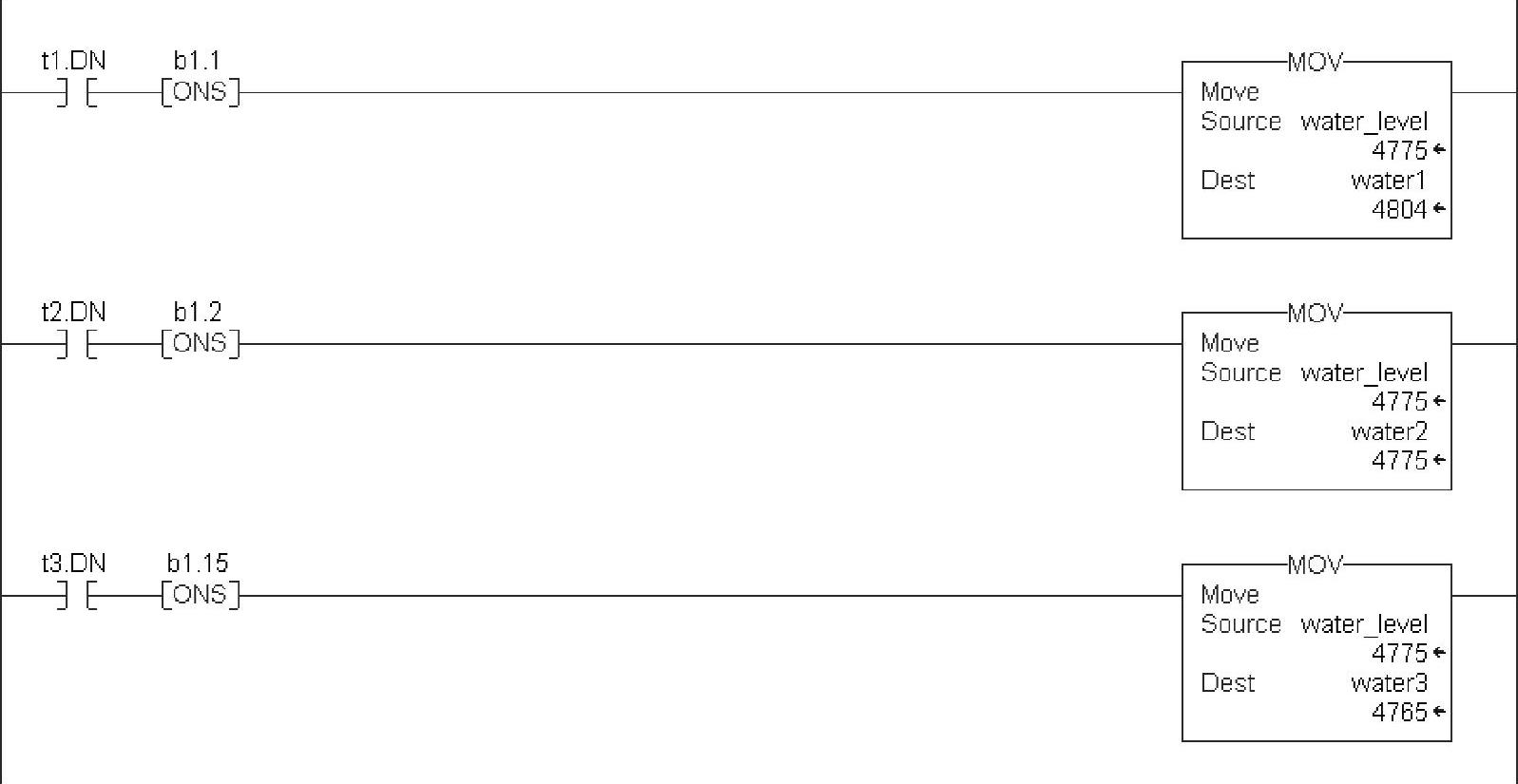
图3-67 液位采集梯级
将3个液位值分别做差,如果第二个液位变化值比第一个值大,那么将产生一个水位上涨过快的报警,如图3-68所示。
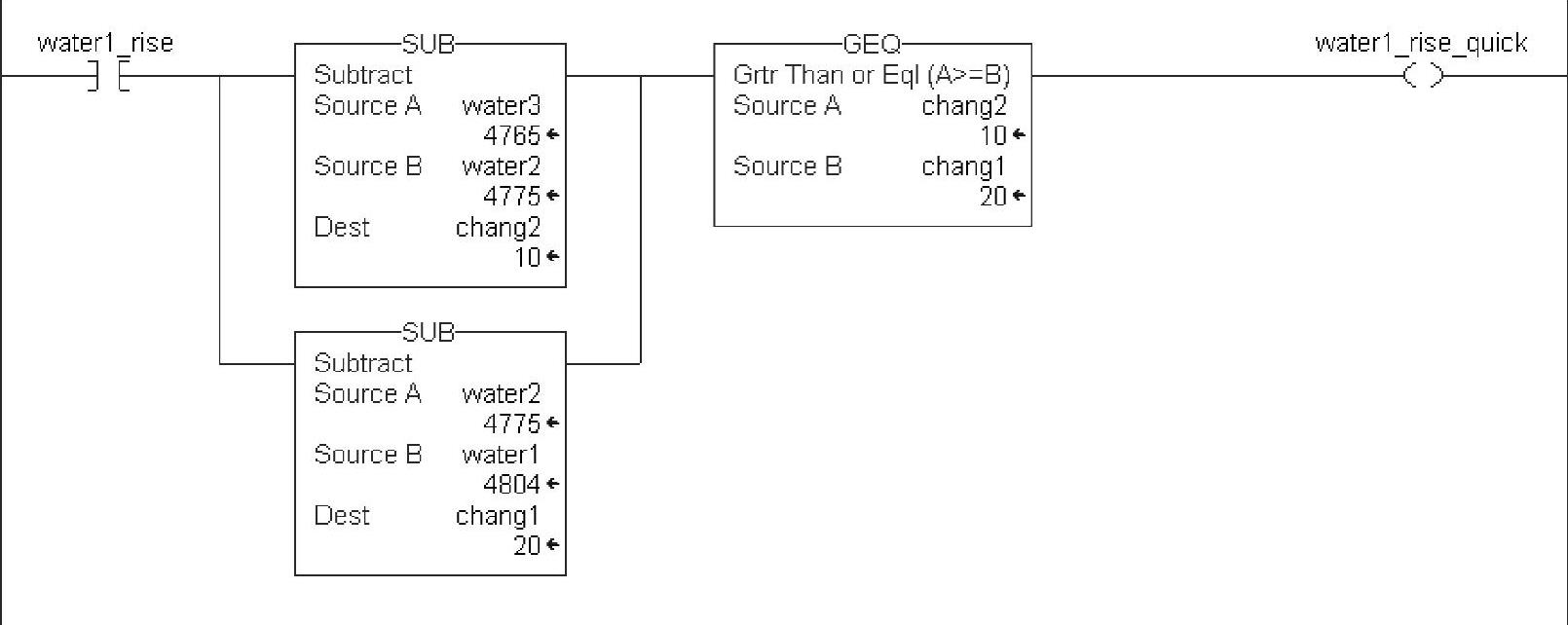
图3-68 水位上涨过快报警梯级
同理,如果第二个液位变化值比第一个小,则会产生一个水位下降过快的报警,如图3-69所示。
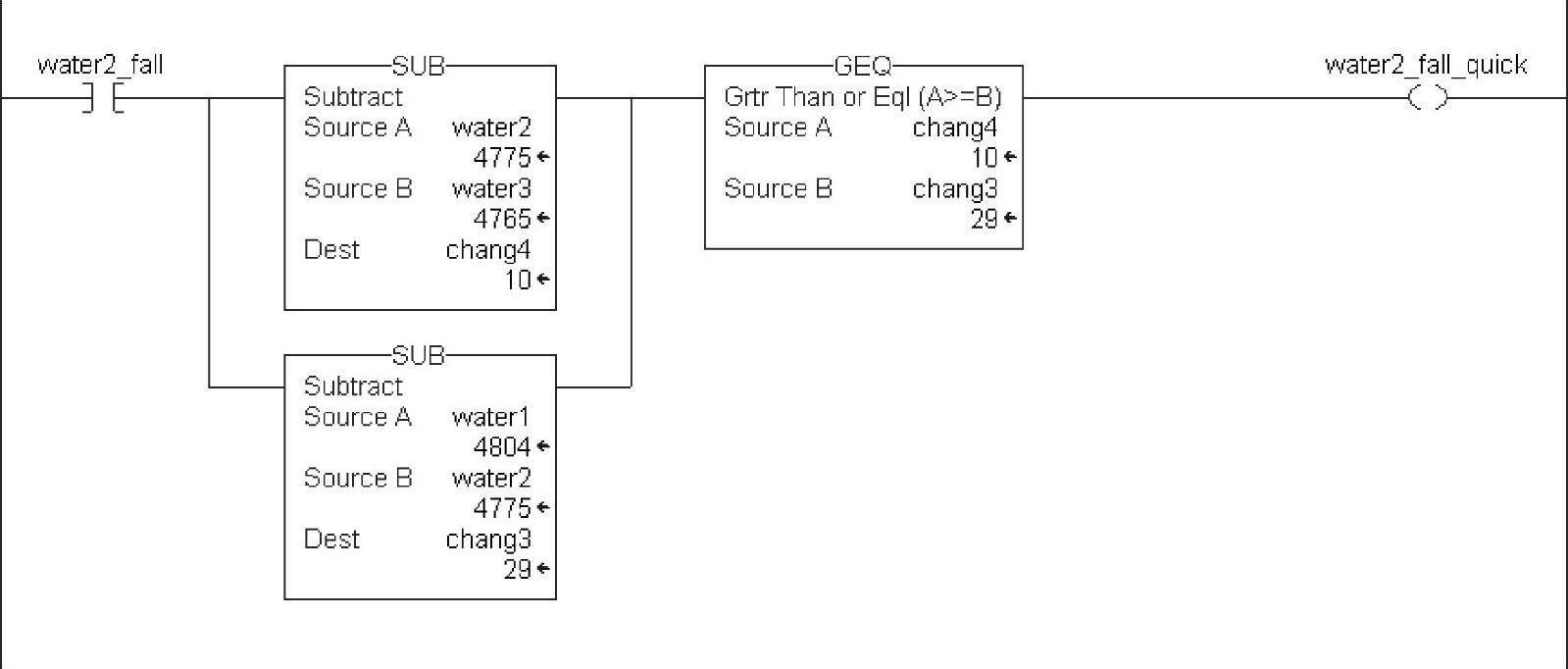
图3-69 水位下降过快报警梯级
可以利用各种液位信号来控制阀门开度以实现恒水位。首先用K1标签作为阀门控制开度变化量。如果当前水位高于设定的高水位,则对当前水位与设定水位作差。如果差值(differenc1)大于200,则将K1值置为600,如果差值小于200,则将K1值置为400,如图3-70所示。
如果当前水位高于高水位,且滤池处于进水状态,则对增加出水阀门的开度。如果水位上涨过快(water1_rise_quick),那么将出水阀门的开度增加900。如果没有水位上涨过快的报警,则将K1的值增加到出水阀的开度上(K1的值由上图的梯级计算),如图3-71所示。
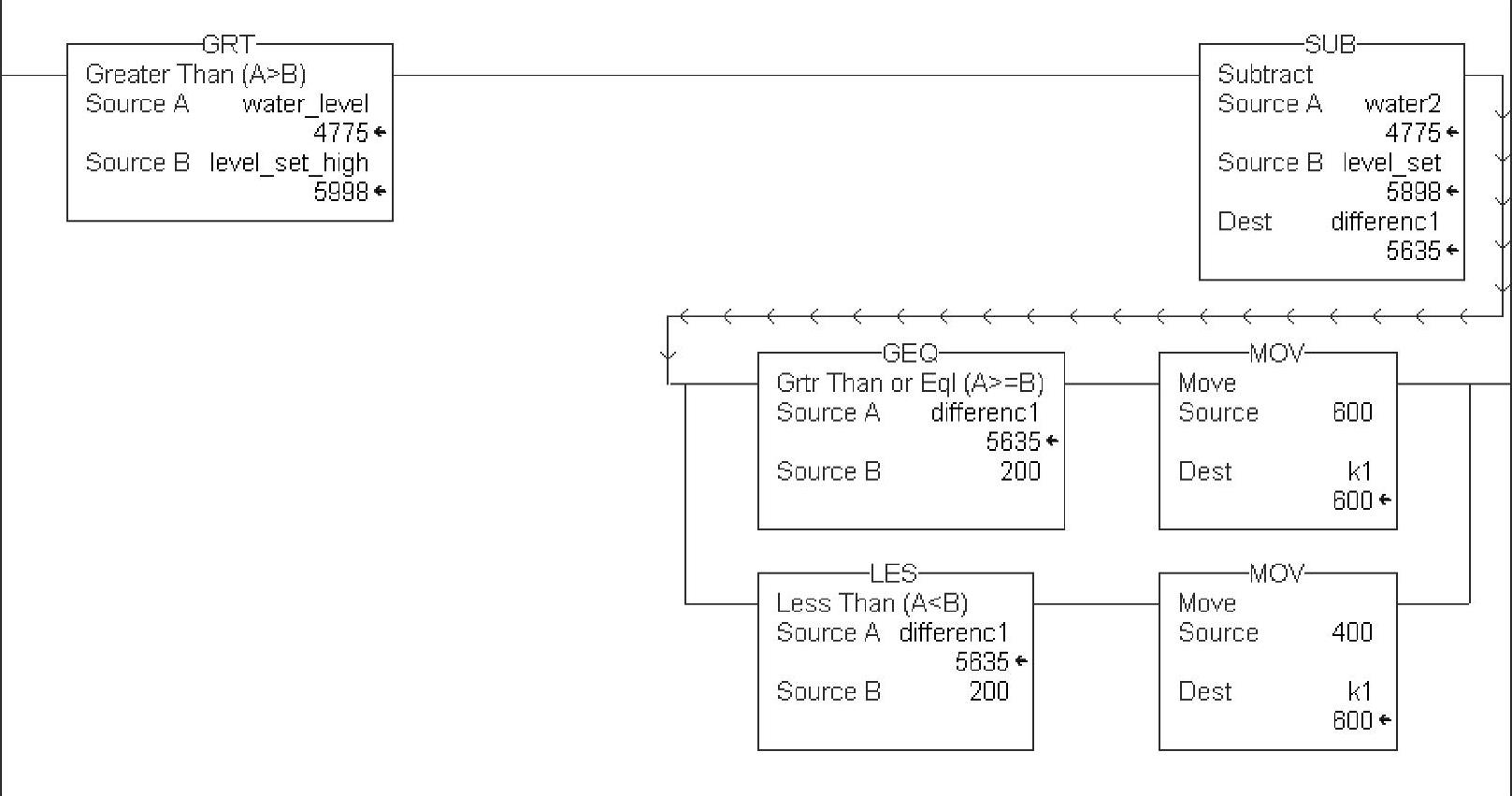
图3-70 阀门开度变化量计算梯级
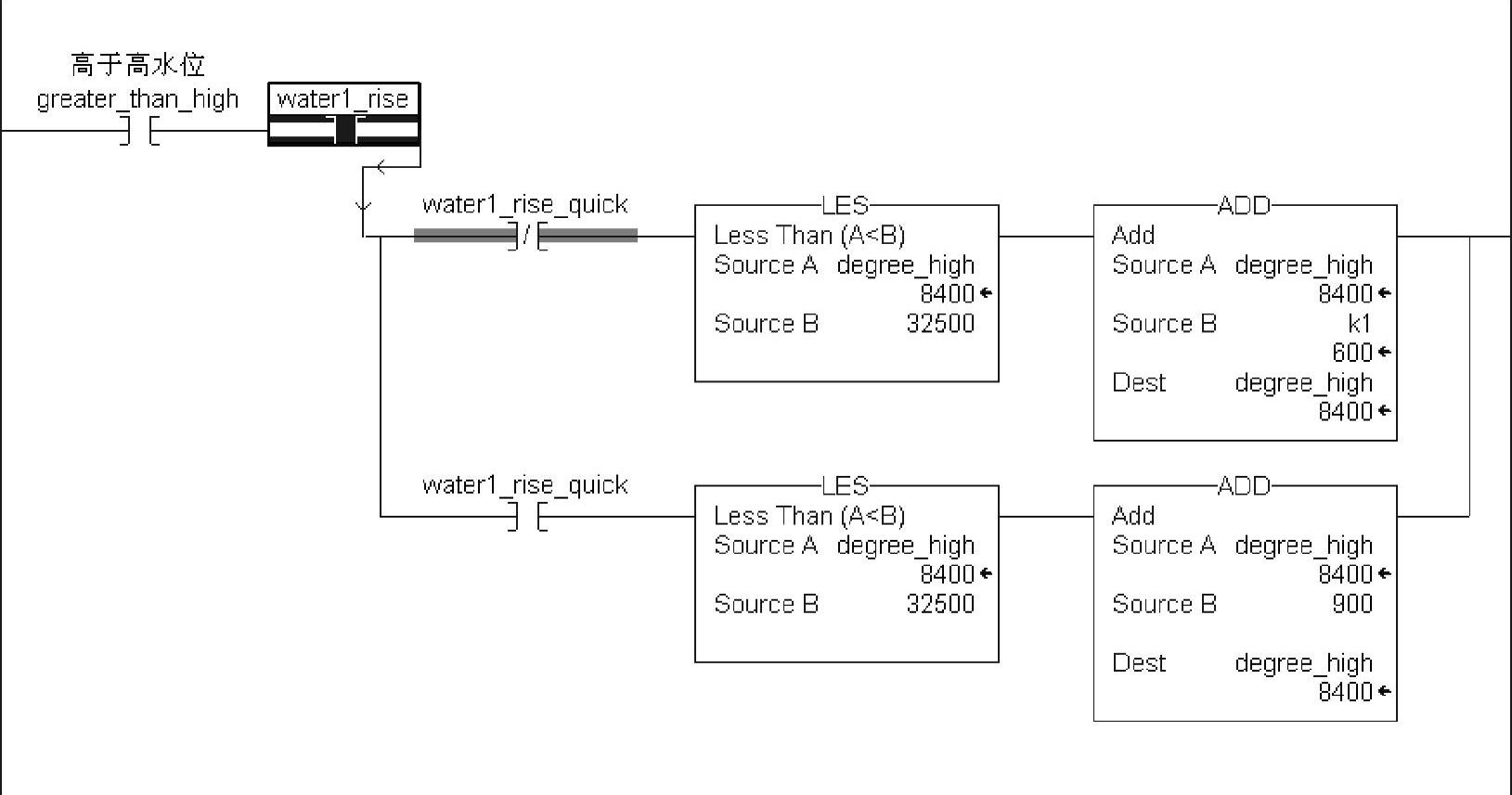
图3-71 阀门开度设定梯级
而当液位低时,进水阀门的开度调整与此类似,只是将ADD指令变成SUB指令减小开度。整套程序就是通过上述算法实现恒液位控制,不断的调整出水阀或进水阀的开度,将液位控制在与设定水位误差不超过100的范围内。
综上所述,滤池就是通过这样的编程思路完成恒液位控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






