利用拉压力传感器和位移传感器,可对油气弹簧在运动到不同位置时的阻力和位置进行测量,在一个试验周期T内,采样得到2n个试验测试数据Data,其中,前n个试验测试数据是所得到的油气弹簧位移x,而后n个试验测试数据是所测油气弹簧的拉压力FD,即

油气弹簧的位移和阻力数组,可分别表示为


(1)位移 由于试验所施加的激励位移信息号是正弦波,因此,油气弹簧的位移可表示为
x=Asin(2πft+φ0) (12-3)
式中,A为激励位移幅值;f为激励位移谐波信号频率;φ0为激励位移谐波信号的初始角。
油气弹簧试验所测得位移数组中的最大值,为油气弹簧试验的最大位移或幅值A,即
A=max{xi} (12-4)
利用采样所得到第1个位移试验数据x1,即时间t=0时所测得的位移,可求得油气弹簧激励位移谐波信号的初始角φ0,即

将式(12-5)和式(12-4)代入式(12-3),即可得油气弹簧试验所施加的谐波激励信号为

如果试验所施加的位移激励信号频率为f,则一个循环的时间周期T为

在一个采样时间周期T内采集n组位移数据,可得采样时间间隔Δt为

因此,在第iΔt时间处所采集的位移可表示为
xi=Asin(2πfiΔti+φ0)(i=1,2,…,n) (12-9)
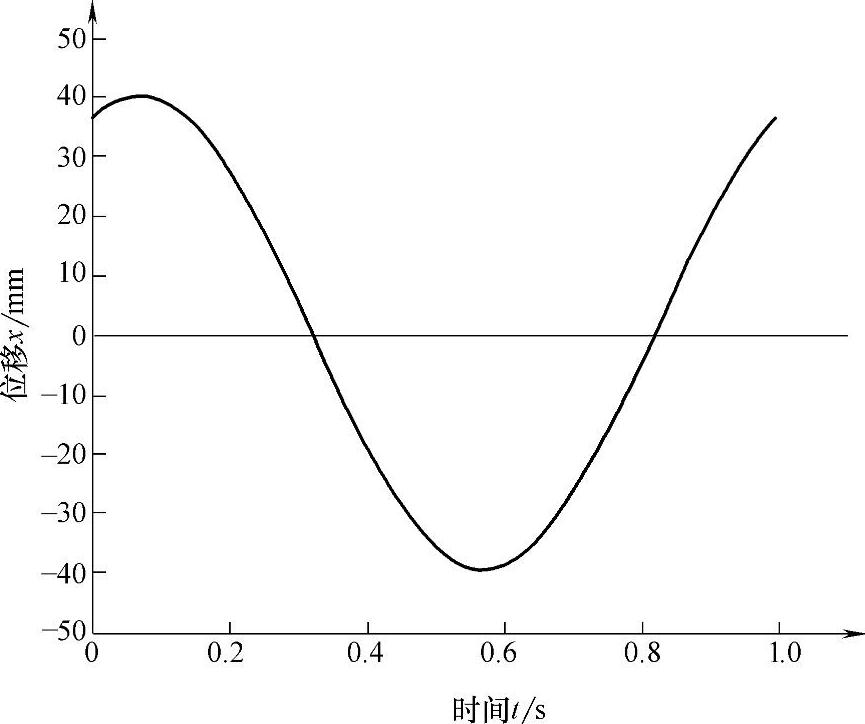
图12-1 油气弹簧位移x随时间t的变化曲线
例如,某油气弹簧试验的加载激励信号的频率f=1.0Hz,数据采样个数为512,最大位移为40mm,根据试验测得的试验数据,利用式(12-5)可求得激励信号的初始相角φ0=66.3349°,则油气弹簧试验测得的位移随时间变化曲线如图12-1所示。(https://www.daowen.com)
(2)速度 对油气弹簧的谐波位移信号式(12-3)求导,可求得谐波激励速度为

因此,在第iΔt时间处的速度可表示为

将式(12-5)、式(12-4)和式(12-8)代入式(12-11),便可得到油气弹簧在第i个位移位置xi点处的速度Vi(i=1,2,…,n),因此,油气弹簧的速度数组可表示为
{Vi}=[V1,V2,…,Vn] (12-12)
由油气弹簧试验所测得的速度随时间的变化曲线,如图12-2所示。
(3)阻力 油气弹簧不论是在压缩行程还是在复原行程,其所测得的阻力FD包含有节流阻尼力、气室弹性力、惯性力和摩擦阻力,因此,油气弹簧所测得的阻力为:
FD=Fd+Fq+Fa+Ff (12-13)
式中,Fd为油气弹簧的节流阻尼力;Fq为油气弹簧气室弹性力;Fa为油气弹簧运动惯性力;Ff为油气弹簧运动摩擦力。
如果忽略油气弹簧运动过程的摩擦力Ff,则式(12-13)可表示为
FD=Fd+Fq+Fa (12-14)
因此,在第iΔt时间处的阻力可表示为
FDi=Fdi+Fqi+Fai(i=1,2,…,n) (12-15)
式(12-15)表明试验所测得的在各点位移处的阻力,是由各点处的节流阻尼力、气室弹性力和动惯性力组成的。
所以,油气弹簧试验所测得的阻力数组,可表示为
{FDi}={Fdi+Fqi+Fai}(i=1,2,…,n) (12-16)
对上述油气弹簧,由试验测得的油气弹簧阻力随时间的变化曲线,如图12-3所示。
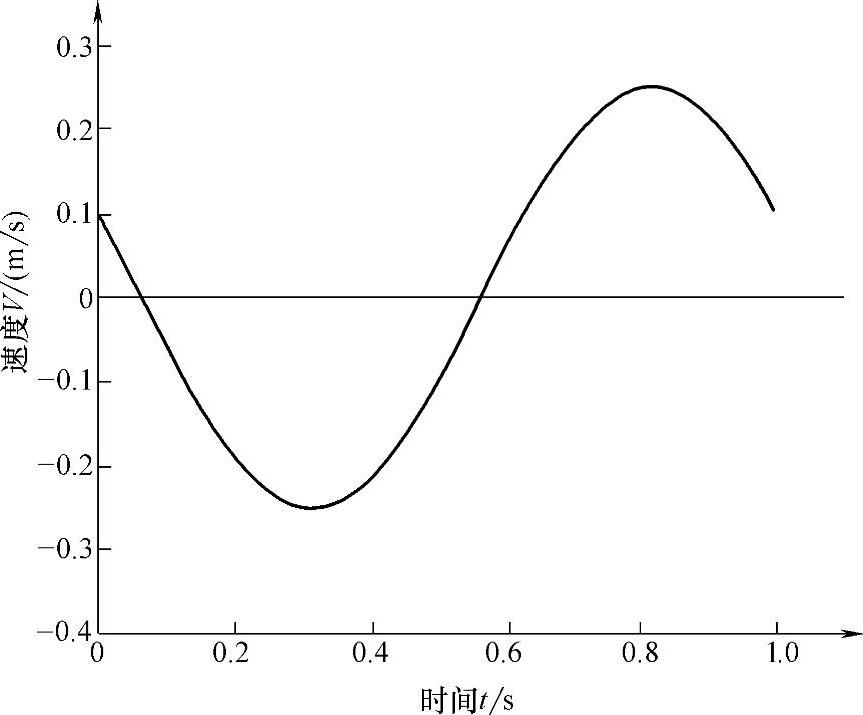
图12-2 油气弹簧速度V随时间t的变化曲线
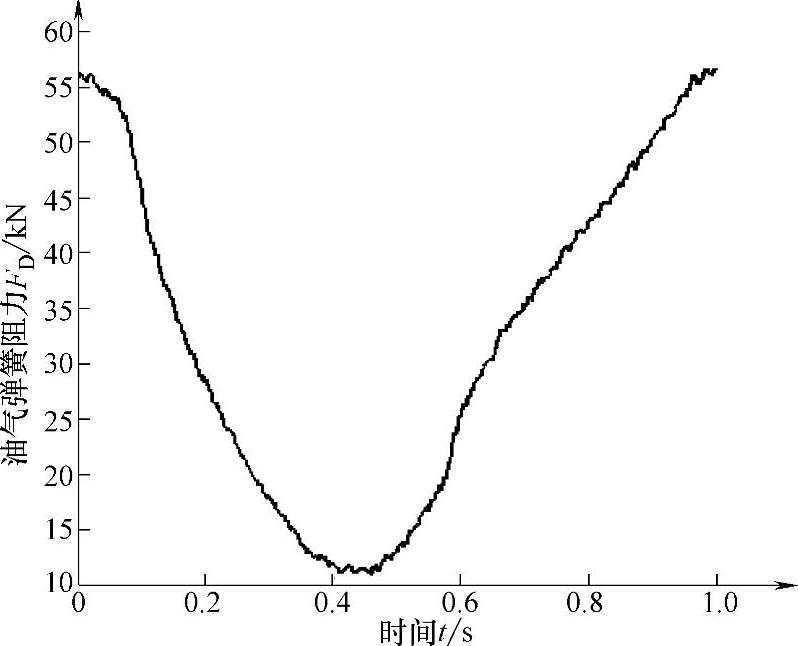
图12-3 试验测得的油气弹簧阻力FD随时间t的变化曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






