1.平面问题的基本方程
现在,我们考虑静力学、几何学和物理学三方面的条件,分别建立三套方程。
(1)平衡微分方程及应力状态 下面,我们首先考虑空间问题的静力学方面,在弹性体内任一点取出一个微分体,根据平衡条件来导出应力分量和体力分量之间的关系式,也就是空间问题的平衡微分方程,并对物体内一点的应力状态进行分析。
如图2-12所示,在物体内任意一点P,取图示微小平行六面体,它的六面垂直于坐标轴,且棱边的长度PA=dx,PB=dy,PC=dz。微小平行六面体各面上的应力分量如图2-12所示。
若以连接六面体前后两面中心的直线为ab为轴距,列出力矩的平衡方程ΣMab=0,可得

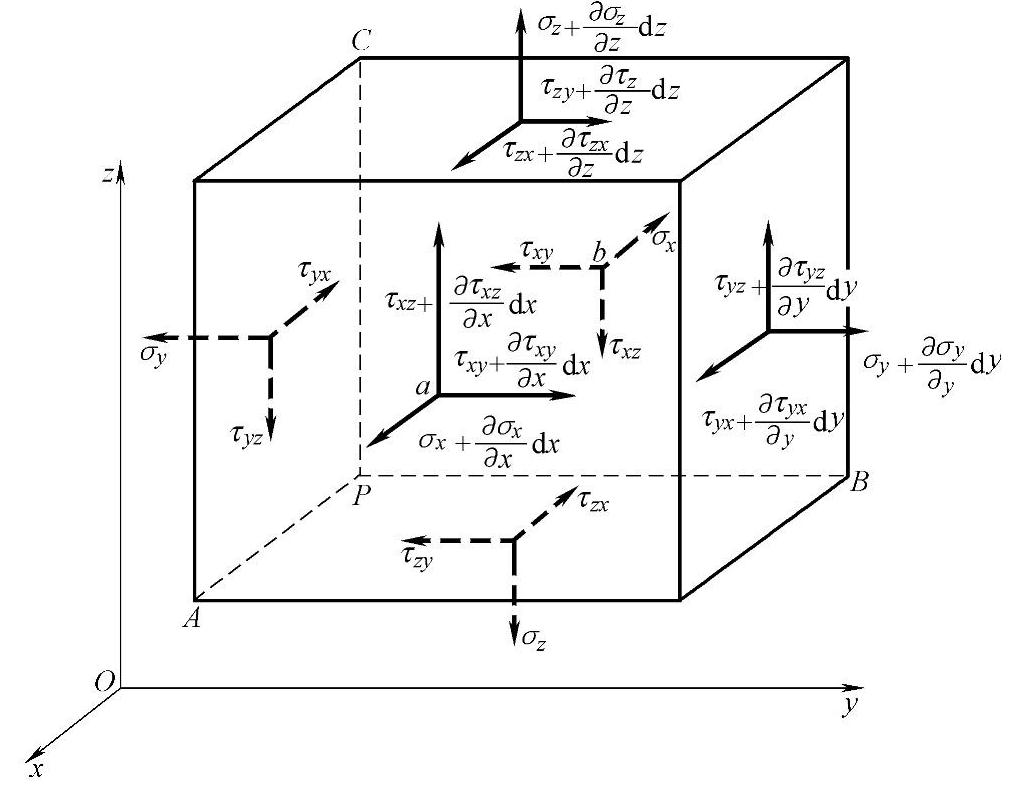
图2-12 微小平行六面体各面上的应力分量
化简并略去高阶微量,得
τyz=τzy
同理可得
τzx=τxz,τxy=τyx
这又一次证明了空间一般情况下切应力的互等关系。
分别以x轴、y轴及z轴为投影轴,列出投影的平衡方程ΣFx=0、ΣFy=0及ΣFz=0,得
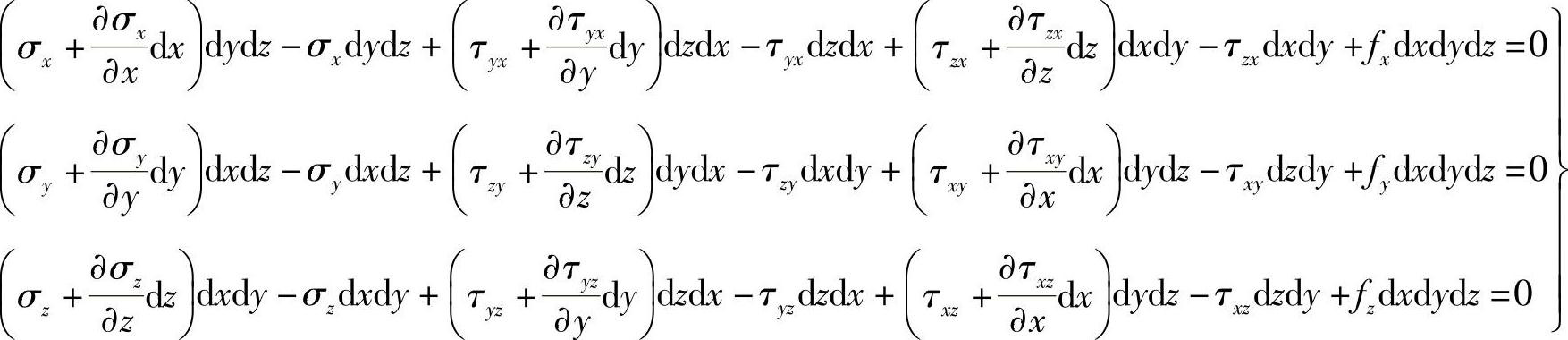
将上述三个方程化简,可得
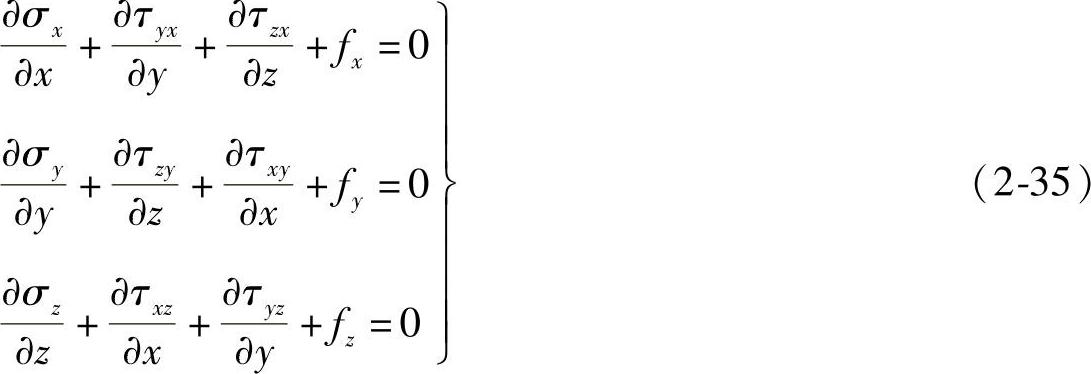
这就是空间问题的平衡微分方程。
现在继续研究空间问题的静力学方面。假定任一点P的六坐标面上的应力分量σx、σy、σz,τxy=τyx,τyz=τzy,τzx=τxz,求经过该点任意斜截面上的应力。为此,如图2-13所示,在点P附近取一个平面ABC,它平行于上述斜面,并与经过点P而平行坐标面的三个平面行程一个微小的四面体PABC。当四面体PABC与点P无限接近时,平面ABC上的平均应力就成为上述斜截面上的应力。
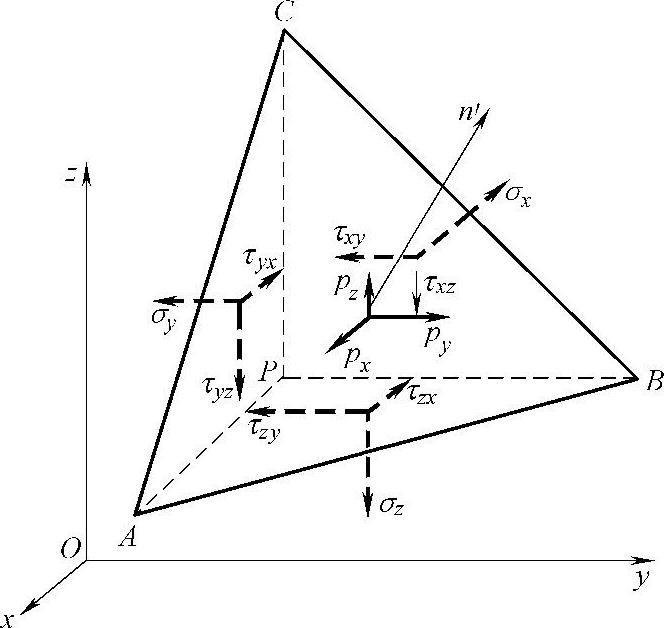
图2-13 四面体斜截面上的应力
令平面ABC的外法线为n′,则方向余弦为
cos(n′,x)=l,cos(n′,y)=m,cos(n′,z)=n
设△ABC的面积为dS,则△PBC、△CPA、△APB的面积分别为ldS、mdS和ndS。四面体PABC的体积用dV代表。△ABC上的全应力p在坐标轴上的投影分别为px、py和pz。根据四面体的平衡条件,并用px和py分别代表斜面AB上的全应力p在x轴及y轴上的投影。设斜面AB的长度为ds,则PB面及PA面的长度分别为lds和mds,则PAB的面积为ldsmds/2。将垂直于图平面的尺寸取为1,由平衡条件ΣFx=0,可得ΣFx=0,即
pxdS-σxldS-τyxmdS-τzxndS+fxdV=0
除以dS,整理得

当四面体PABC与P点无限接近时,由于dV是比dS更高一阶的微量,所以 趋向于零。于是得出式(2-36)中的第一式,其余两式可分别由平衡方程ΣFy=0及ΣFz=0得出
趋向于零。于是得出式(2-36)中的第一式,其余两式可分别由平衡方程ΣFy=0及ΣFz=0得出

设△ABC上的正应力σn,则有
σn=lpx+mpy+npz
将式(2-36)代入,并分别用τxy、τyz和τzx替代τyx、τzy和τxz,可得
σn=σxl2+σym2+σzn2+2mnτyz+2lnτzx+2lmτxy (2-37)
设△ABC上的切应力为τn,则由于

于是有

由式(2-37)和式(2-38)可知,在物体内的任意一点,如果已知坐标面上的六个应力分量σx、σy、σz、τxy、τyz和τzx,就可以求得任一截面上的正应力和切应力。
设经过任一点P的某一斜面上的切应力等于零,则该斜面上的正应力称为在点P的一个主应力,该斜面称为在点P的一个应力主面,而该斜面的法线方向称为在点P的一个应力主向。
假设在点P有一个应力主面存在。这样,由于该面上的切应力等于零,所以该面上的全应力就等于该面上的正应力,也就等于主应力。于是该面上的全应力在坐标轴上的投影成为
px=lσ,py=mσ,pz=nσ
将式(2-36)代入上式,可得

此外,还有方向余弦的关系式
l2+m2+n2=1 (2-39b)
如果将式(2-39a)与式(2-39b)联立求解,就能够得到σ、l、m和n的一组解答,就得到点P的一个主应力以及与之对应的应力主面和应力主向。下面进行求解分析。
将式(2-39a)化为

这是l、m、n的三个齐次线性方程。因为由式(2-39b)可知l、m和n不能全为零,所以这三个方程的系数的行列式应该等于零,即
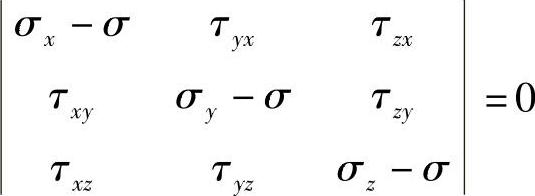
将行列式展开,可得σ的三次的特征方程
σ3-I1σ2+I2σ-I3=0(www.daowen.com)
式中,
I1=σx+σy+σz
I2=σxσy+σyσz+σzσx-τ2xy-τ2yz-τ2zx
I3=σxσyσz+2τxyτyzτzx-σxτ2yz-σyτ2zx-σzτ2xy
特征方程有三个实数根,即σ1、σ2和σ3,代表某点的三个主应力。为了求得与主应力σ1相应的方向余弦l1、m1和n1,可以利用式(2-39c)中的任意两式,如其中的前两式。由此可得
l1(σx-σ1)+m1τyx+n1τzx=0
l1τxy+m1(σy-σ1)+n1τzy=0
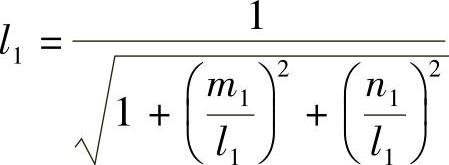
将上列两式均除以l1,可得


可以从上两式中解出比值 和
和 ,结合式(2-39b),可解得l1,即
,结合式(2-39b),可解得l1,即
并由已知的比值 和
和 ,即求得m1和n1。同样,可以求得与主应力σ2相应的l2、m2和n2;以及与主应力σ3相应的l3、m3和n3。
,即求得m1和n1。同样,可以求得与主应力σ2相应的l2、m2和n2;以及与主应力σ3相应的l3、m3和n3。
可以证明:在物体内的任意一点,一定存在三个相互垂直的应力主面和对应的三个主应力σ1、σ2、σ3;三个主应力中最大的一个就是该点的最大正应力,最小的一个就是该点的最小正应力;最大与最小的切应力,在数值上等于最大主应力和最小主应力之差的一半,作用于通过中间主应力并且“平分最大主应力和最小主应力的夹角”的平面上。在物体内的任意一点,三个相互垂直的面上的正应力之和I1是不变量,且I1=σ1+σ2+σ3。
需要指出的是,应力和应力主方向取决于结构外力和约束条件,与坐标系无关。
(2)几何方程 现在来考察空间问题的几何方面。在空间问题中,形变分量和位移分量应当满足下列6个方程,即空间问题的几何方程
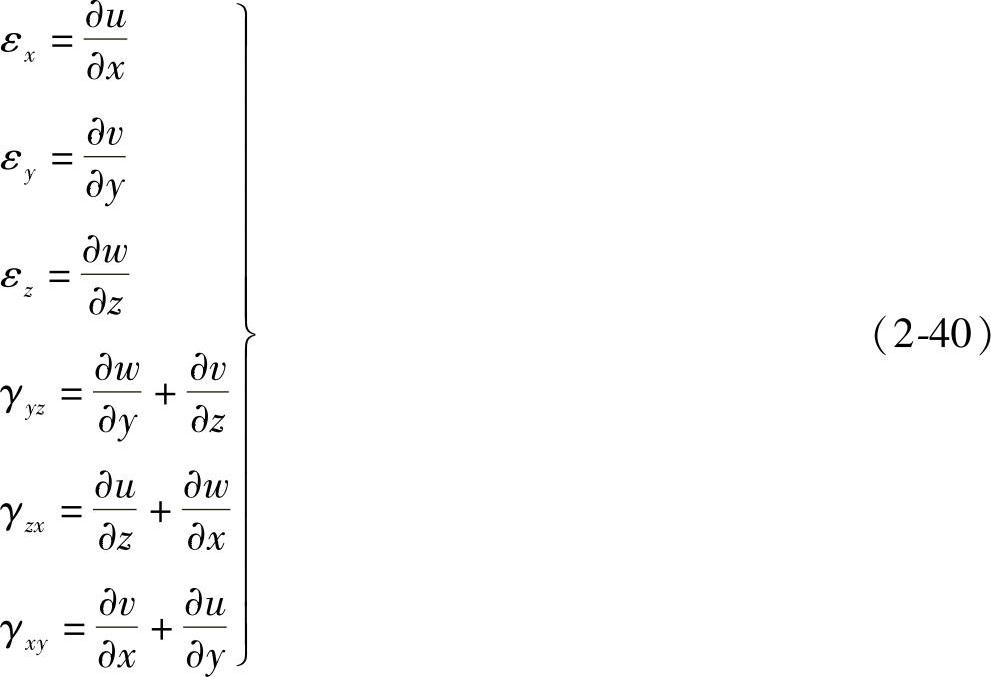
其中,第一式、第二式和第六式已由式(2-7)给出,其余三式可以用同样的方法推导出。
附带说明一下体应变的概念。设有微小的正平行六面体,其棱长为dx、dy和dz。在变形之前,它的体积为dxdydz;在变形之后,它的体积为(dx+εxdx)(dy+εydy)(dz+εzdz)。因此,它的每单位体积的体积改变,也就是体应变,为

由于位移和变形是微小的假定,可以略去线应变的乘积项,则上式简化为
θ=εx+εy+εz
将几何方程(2-40)中的前三式代入上式,得
它表示体应变和位移分量之间的简单微分关系。
(3)物理方程 现在考虑空间问题的物理方面。各向同性体中的形变分量和应力分量之间的关系由式(2-8)给出
这是空间问题物理方程的基本形式,其中形变分量是由应变分量表示的,可用于按应力求解的方法。将式(2-41)中的前三项相加,得

应用式(2-39)并令Θ=σx+σy+σz,则上式可以简写为

前面已经说明,θ=εx+εy+εz是体应变。现在又看到,体应变θ和Θ成正比。因此,Θ=σx+σy+σz也就成为体积应力,而θ和Θ之间的比例常数 也就称为体积模量。
也就称为体积模量。
为了以后用起来方便,下面来导出物理方程的另一种形式,即将应力分量用形变分量来表示。
由式(2-41)中的第一式,可得

由上式解得σx为
将由式(2-42)得来的 代入上式,得
代入上式,得
对于σy和σz,也可以导出与此相似的两个方程。此外,再由式(2-41)求解切应力分量,总共得出如下的6个方程
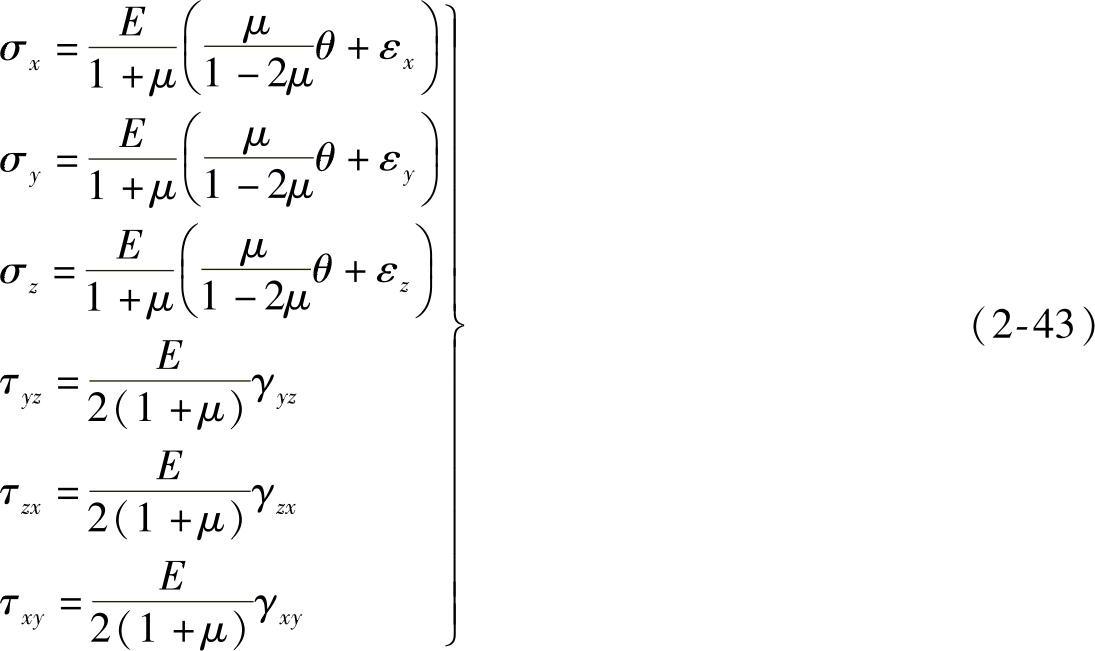
这是空间问题物理方程的第二种形式,其中应变分量是由形变分量表示的,可用于按位移求解的方法。
2.空间问题的边界条件
对于空间问题,与平面问题一样,当物体处于平衡状态时,除了内部各点的应力状态应满足平衡微分方程以外,在边界上应满足边界条件。
(1)位移边界条件 当边界上已知位移时,应建立物体边界上点的位移与给定位移相等的条件。如令给定位移的边界为Su,则有(在Su上)

式中,(u)s、(v)s和(w)s表示位移的边界值,而u、v和w在边界上是坐标的已知函数。
(2)应力边界条件 当物体的边界上给定面力时,则物体边界上的应力应满足与面力相平衡的平衡条件。即若在Sσ部分边界上给定了面力分量fx(s)、fy(s)和fz(s),则可以由边界上任意一点微分体的平衡条件,导出应力与面力之间的关系。为此,在边界上任意一点P取出一个类似于图2-13的微分体。这时,斜面ABC就是变截面,在此面上的应力分量px、py和pz应代换为面力分量fx、fy和fz。结合式(2-36)得出平面问题的应力边界条件(在Sσ上)为

式中,fx(s)、fy(s)和fz(s)在边界上是坐标的已知函数;l、m和n是边界面外法线的方向余弦。
总结起来,对于空间问题,我们共有15个未知函数:6个应力分量σx、σy、σz、τxy(=τyx)、τyz(=τzy)和τzx(=τxz);6个形变分量εx、εy、εz、γxy、γyz和γzx;3个位移分量u、v和w。这15个未知函数在弹性体区域内应当满足15个基本方程:3个平衡微分方程[式(2-35)];6个几何方程[式(2-40)];6个物理方程[式(2-41)或式(2-43)]。此外,在给定约束位移的边界Su上,应满足位移边界条件式(2-44);在给定面力的边界上,还应满足应力边界条件式(2-45)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



