1.半主动悬架系统
随着人们生活水平的不断提高,用户对汽车舒适性的要求也越来越高,传统的汽车悬架系统已不能满足人们的要求。人们希望汽车车身的高度、悬架的刚度、减振器的阻尼大小能随汽车的行驶速度以及路面状况等行驶条件的变化而自动调节,从而实现乘坐舒适性的提高。
1973年,美国加州大学戴维斯分校的D.A.Crosby和D.C.Karnopp首先提出了半主动悬架的概念。其基本原理是:用可调刚度弹簧或可调阻尼的减振器组成悬架,并根据簧载质量的加速度响应等反馈信号,按照一定的控制规律调节弹簧刚度或减振器的阻尼,以达到较好的减振效果。
1975年,Margolis等人提出了由“开关”控制的半主动悬架。1983年,日本丰田汽车公司开发了具有3种减振工况的“开关”式半主动悬架,并应用于丰田Soarer280GT型轿车上。
1986年,Kim Brough在半主动悬架控制方法中引入了Lyapunov方法,改进了控制算法的稳定性。1988年,日本日产公司首次将“声纳”式半主动悬架系统应用于Maximas轿车上,它可预测路面信息,悬架减振器有“柔和”、“适中”和“稳定”3种选择状态。
1994年,Prinkos等人使用电流变和磁流变体作为工作介质,研究了新型半主动悬架系统。2002年,采用美国德尔福(Delphi)公司磁流变减振器的MagneRide半主动悬架系统应用在了Cadillac Seville STS高档车上,此悬架系统能根据行驶情况自动改变减振阻尼。
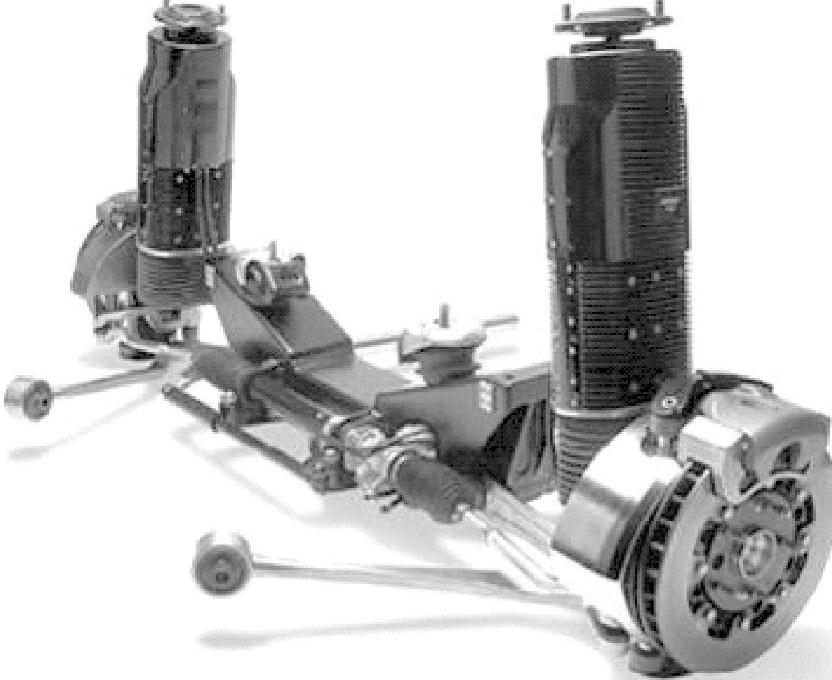
图1-13 半主动悬架系统
半主动悬架由无源但可控制的阻尼元件组成,在车辆悬架中,弹性元件除了吸收和存储能量外,还得承受车身重量及载荷,因此,半主动悬架不考虑改变悬架的刚度而只考虑改变悬架的阻尼。由于半主动悬架结构简单,成本低,在工作时几乎不消耗车辆动力,又能获得与主动悬架相近的性能,因而具有巨大的发展潜力,故应用较广。常用的半主动悬架系统,如图1-13所示。
半主动悬架分为刚度可调和阻尼可调两大类。目前,在半主动悬架的控制研究中,以对阻尼控制的研究居多。阻尼可调半主动悬架又可分为有级可调半主动悬架和连续可调半主动悬架。有级可调半主动悬架的阻尼系数只能取几个离散的阻尼值,而连续可调半主动悬架的阻尼系数在一定的范围内可连续变化。
(1)有级可调减振器 有级可调减振器阻尼可在Ⅱ—Ⅲ档之间快速切换,切换时间通常为10~20ms。有级可调减振器实际上是在减振器结构中采用较为简单的控制阀,使流通面积在最大、中等或最小之间进行有级调节。通过减振器顶部的电动机控制旋转阀的旋转位置,使减振器的阻尼在“软、中、硬”三档之间变化。有级可调减振器的结构及其控制系统相对简单,但在适应汽车行驶工况和道路条件的变化方面有一定的局限性。
(2)连续可调减振器 连续可调减振器阻尼的调节可采取以下两种方式:
1)节流孔径调节。早期的可调阻尼器主要是节流孔可实时调节的油液阻尼器。通过步进电动机驱动减振器的阀杆,连续调节减振器节流阀的通流面积来改变阻尼,节流阀可采用电磁阀或其他形式的驱动阀来实现。这类减振器的主要问题是节流阀结构复杂,制造成本高。
2)减振液黏性调节。使用粘度连续可调的电流变或磁流变液体作为减振液,从而实现阻尼无级变化,是当前的研究热点。减振液只需通过改变电场强度,使电流变液体的粘度改变,就可改变减振器的阻尼力。电流变减振器的阻尼可随电场强度的改变而连续变化,无需高精度的节流阀,结构简单,制造成本较低,且无液压阀的振动、冲击与噪声,不需要复杂的驱动机构,因此采用它作为半主动悬架的执行器是一个非常好的选择。(www.daowen.com)
2.主动悬架系统
传统悬架系统的刚度和阻尼系数,是按经验设计或优化设计方法选择的,一经选定后,在车辆行驶过程中就无法进行调节,因此其减振性能的进一步提高受到限制,这种悬架称为被动悬架。
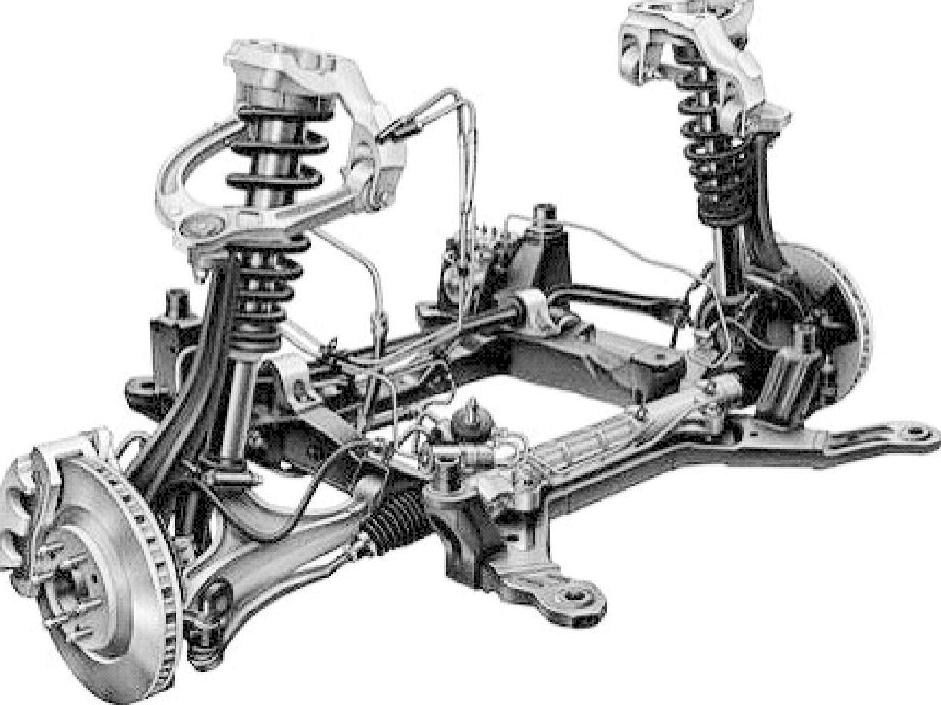
图1-14 MRC电磁主动悬架系统
为了克服被动悬架的缺陷,国外在20世纪60年代就提出了主动悬架的概念,主动悬架就是由在悬架系统中采用有源或无源可控制的元件组成。它是一个闭环控制系统,根据车辆的运动状态和路面状况,中央控制单元(ECU)进行实时运算,而后马上对减振器的控制器发出相应的指令,控制车辆悬架参数,使悬架始终处于最优减振状态,并抑制和控制车身运动。当汽车制动或拐弯时的惯性引起弹簧变形时,主动悬架系统会产生一个与惯力相对抗的力,减少车身位置的变化。目前大部分的主动悬架系统都是通过空气、液压、电磁液这三种方式来实现悬架的可调性的,所以主动悬架的特点就是能根据外界输入或车辆本身状态的变化进行动态自适应调节,因此,系统必须是有源的。图1-14所示为MRC电磁主动悬架系统。
对于磁流变减振器,当接通电流后,磁流变体材料中原来处于分散状态的磁性体便会横向排成一列,使减振器内部的液体形状发生变化,因此,减振器的阻尼会变硬,并且可随着磁场强弱无级变化。磁流变减振器结构简单;其反应速度是微秒级的,每秒可以动作1000次,这是普通主动悬架难以实现的,这样快的反应速度,使它高速行驶时也能应付自如;磁流变减振器对车辆功率要求低(每一减振器最大需要20W),这几乎不会损耗发动机的动力。
主动悬架系统是近十几年发展起来的,由电脑控制的一种新型悬架系统,它具备三个条件:
1)具有能够产生作用力的动力源。
2)执行元件能够传递这种作用力并能连续工作。
3)具有多种传感器,并能将有关数据集中到微电脑进行运算并决定控制方式。
主动悬架系统汇集了力学和电子学的技术知识,是一种比较复杂的高技术装置。例如,法国桑蒂雅车装配了主动悬架系统,该悬架系统的中枢是一个微电脑,5种传感器分别向微电脑传送车速、前轮制动力、加速踏板踏下的速度、车身垂直方向的振幅及频率、转向盘角度及转向速度等数据。电脑不断接收这些数据并与预先设定的临界值进行比较,选择相应的悬架系统状态。同时,微电脑独立控制每一只车轮上的执行元件,通过控制减振器内油压的变化产生抽动,从而能在任何时候、任何车轮上产生符合要求的悬架系统运动。因此,该悬架系统具有多种驾驶模式选择,驾车者只要扳动位于副仪表板上的“正常”或“运动”按钮,轿车就会自动设置在最佳的悬架系统状态,以求最好的舒适性能。
主动悬架系统还具有控制车身运动的功能,当汽车制动或拐弯时的惯性引起弹簧变形时,主动悬架系统会产生一个力与惯性力相对抗,减少车身位置的变化。例如,德国奔驰2000款C1型跑车,当车辆拐弯时悬架系统传感器会立即检测出车身的倾斜和横向加速度,电脑根据传感器的信息,与预先设定的临界值进行比较计算,立即确定在什么位置上将多大的负载加到悬架系统上,使车身的倾斜减到最小。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






