提升机是吊篮的动力装置,其作用是为悬吊平台上下运行提供动力,并且使悬吊平台能够停止在作业范围内的任意高度位置上。
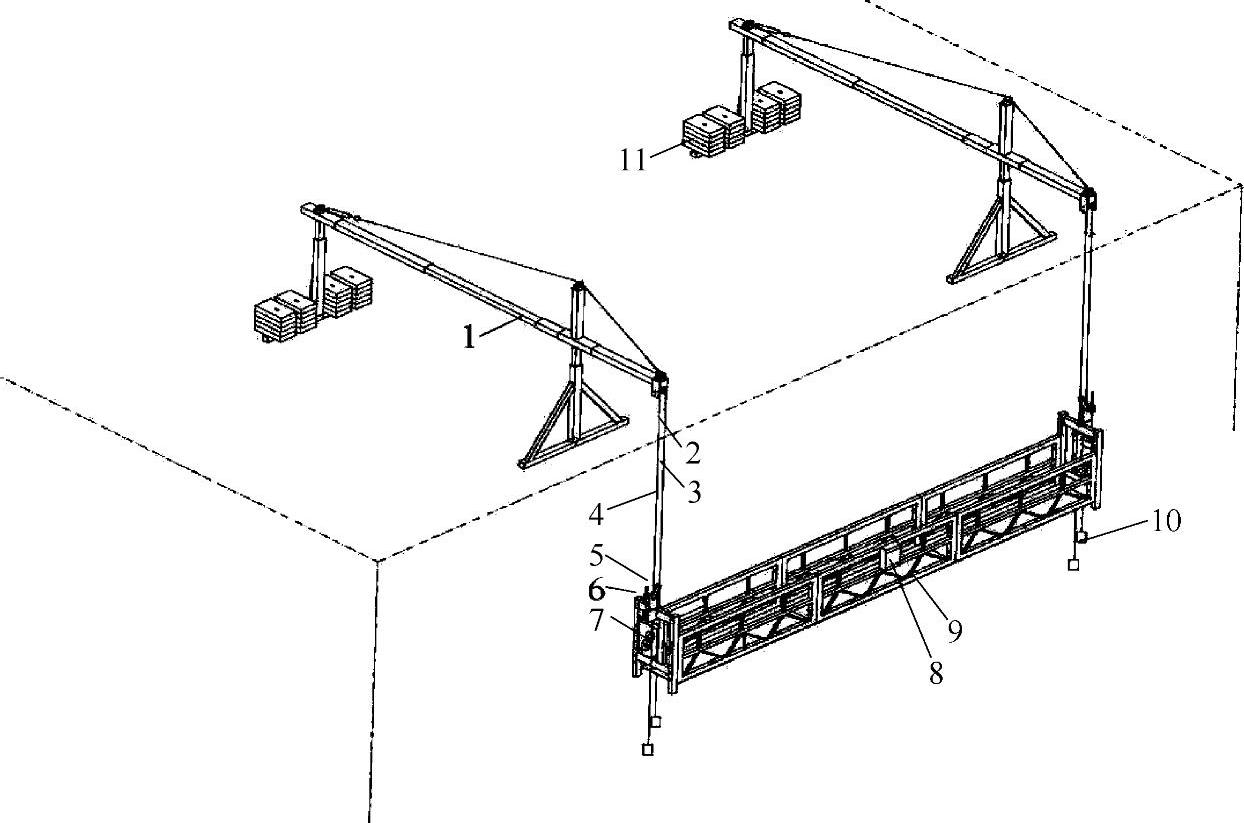
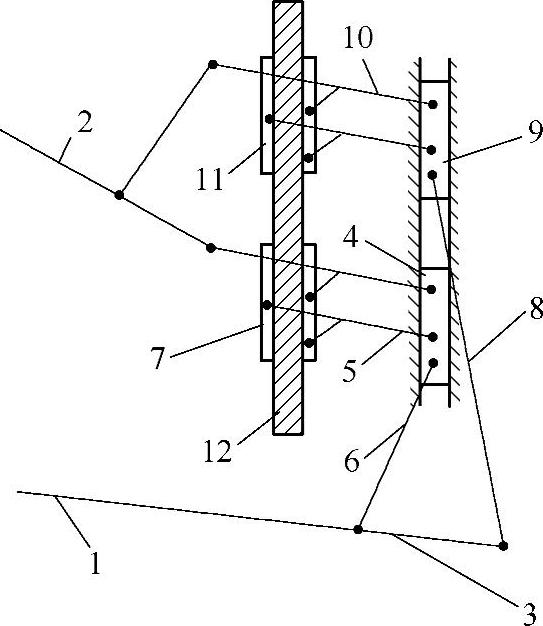
附图4-1 吊篮各基本部件的相互联系和相对位置关系
1—悬挂机构 2—限位块 3—工作钢丝绳 4—安全钢丝绳 5—限位开关 6—安全锁 7—提升机 8—电气控制系统 9—悬吊平台 10—重锤 11—配重
1.提升机的分类
提升机按动力不同,分为电动提升机、气动提升机和手动提升机三种类型。国内大量使用的是电动提升机和一部分手动提升机,气动提升机几乎没有应用。
按提升原理不同,提升机分为爬升式提升机和卷扬式提升机两种类型。
国内吊篮大量使用的是爬升式提升机,卷扬式提升机用量很小。卷扬式提升机大量应用在吊篮的兄弟家族——擦窗机,一种与吊篮作业方式基本相同,专门用于高层建筑外立面清洗的常设备上。
2.电动爬升式提升机
(1)分类与组成 电动爬升式提升机在国内吊篮上应用最广。爬升式提升机按钢丝绳在机内的缠绕方式不同,分为α形绕法和S形绕法两种形式,附图4-2a所示为α形绕法,附图4-2b、c为S形绕法。
电动爬升式提升机由电动机(带制动器)、减速器、绳轮与夹(或压)绳机构和机壳组成,如附图4-3所示。
(2)工作原理 电动爬升式提升机由电动机提供动力,经减速器降低转速并且增加转矩后,带动绳轮旋转。在夹(压)绳机构的夹持作用下,绳轮与缠绕其上的钢丝绳产生摩擦力。在摩擦力作用下,旋转的绳轮便沿着钢丝绳向上爬升,并且通过机壳带动悬吊平台向上运行。在制动器的作用下,绳轮停止转动。此时,由于绳轮与缠绕其上的钢丝绳之间的摩擦力作用,便使绳轮与机壳带着悬吊平台停止在空中。只要摩擦力足够,平台便不会下滑。
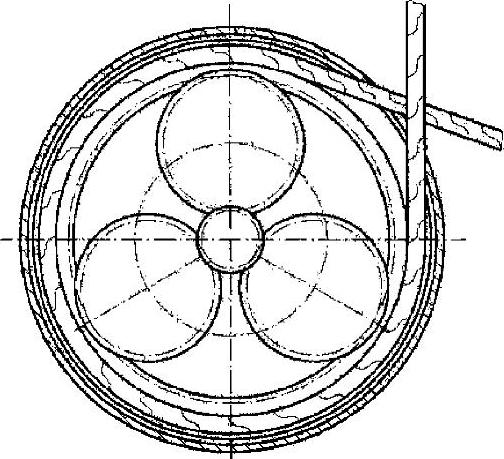
爬升式提升机的绳轮与缠绕其上的钢丝绳之间的相互作用关系如附图4-4所示。
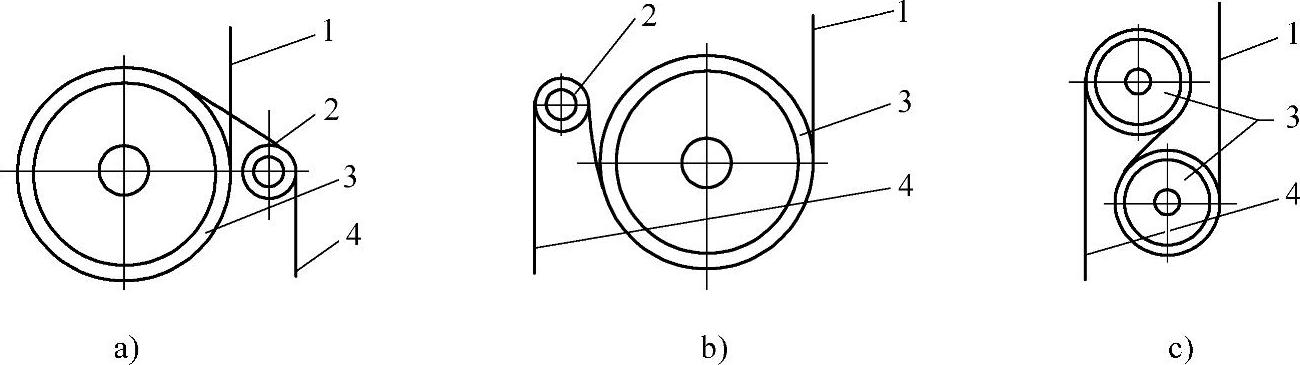
图4-2 钢丝绳在提升机内缠绕方式示意图
a)α形绕法 b)、c)S形绕法
1—入绳 2—导绳轮 3—绳轮 4—出绳
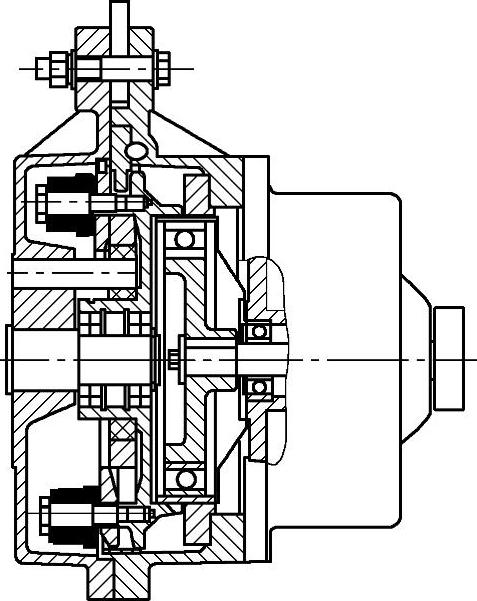
附图4-3 电动爬升式提升机
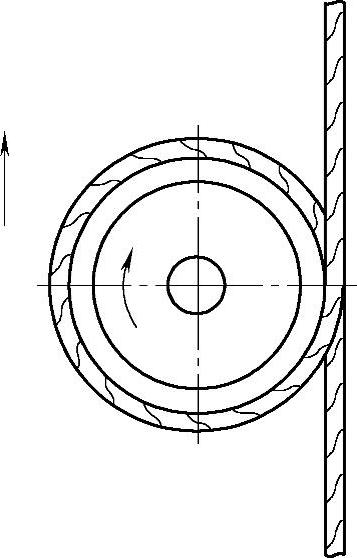
附图4-4 绳轮爬升原理图
绳轮在旋转动力(手动、气动或电动等)作用下,按图示沿顺时针方向转动,在摩擦力作用下,便沿钢丝绳向上爬升。由于绳轮在向上爬升过程中,不断地缠绕着上方的钢丝绳,并且不断地向下方释放缠绕过的钢丝绳,因此在绳轮上始终只缠绕一定包角的钢丝绳,而不会使钢丝绳在绳轮上越卷越多。这便是爬升式提升机的工作原理和工作特点。
(3)典型结构
1)α形爬升式提升机。钢丝绳在提升机内以α形缠绕在绳轮上。钢丝绳从提升机内穿过时只向一个方向弯曲,承受脉动疲劳载荷,与交变载荷相比较,不易疲劳破坏,可延长钢丝绳的使用寿命。
α形爬升式提升机按夹(压)绳方式不同,又细分为径向压绳和轴向夹绳两种典型结构。
附图4-5所示为径向压绳式α形提升机。钢丝绳从上方入绳口进入提升机后,穿入绳轮V形槽内,缠绕绳轮将近一圈后,由提升机右侧出绳口穿出。钢丝绳在机内运动轨迹呈α形。
压绳轮在摆杆的杠杆力作用下,由径向将钢丝绳压向绳轮V形槽。摆杆的杠杆力来自于弹簧弹力和由提升力产生的钢丝绳侧向力。该力使摆杆沿逆时针转动,使压轮产生径向压紧力。
钢丝绳从入绳口进入提升机内的绳轮2与压盘1之间。沿轴向夹紧,并且绕绳轮将近一圈后,由出绳口排出,其运动轨迹亦呈α形。绳轮与压盘之间的轴向夹紧力由十几组圆周均布的碟形弹簧3提供。在绳轮与压盘之间设有胀环4。胀环在偏心轮5的作用下偏向提升机进绳口和出绳口一侧,将此处压盘撑开,加大了此处绳槽的开度。其作用是使钢丝绳在进、出绳口处不被夹紧,便于进绳和出绳。与此处对称的区域为夹绳区。此夹绳方式的特点是,钢丝绳进入提升机后被逐渐夹紧,产生提升力;然后逐渐被放松,由出绳口排出。由于钢丝绳在机内的夹紧和放松是逐渐过渡的,夹持力比较柔和,而且钢丝绳在绳槽内无滑移现象,所以钢丝绳表面磨损小,使用寿命长。
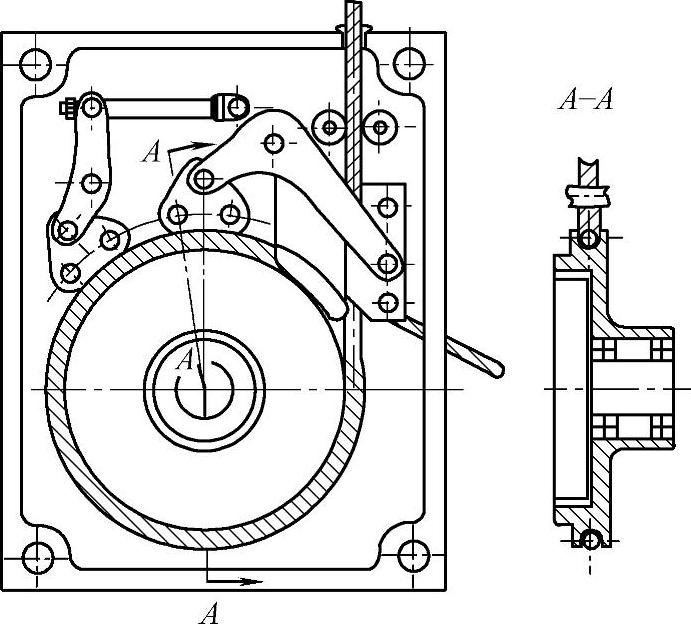
附图4-5 径向压绳式α形提升机
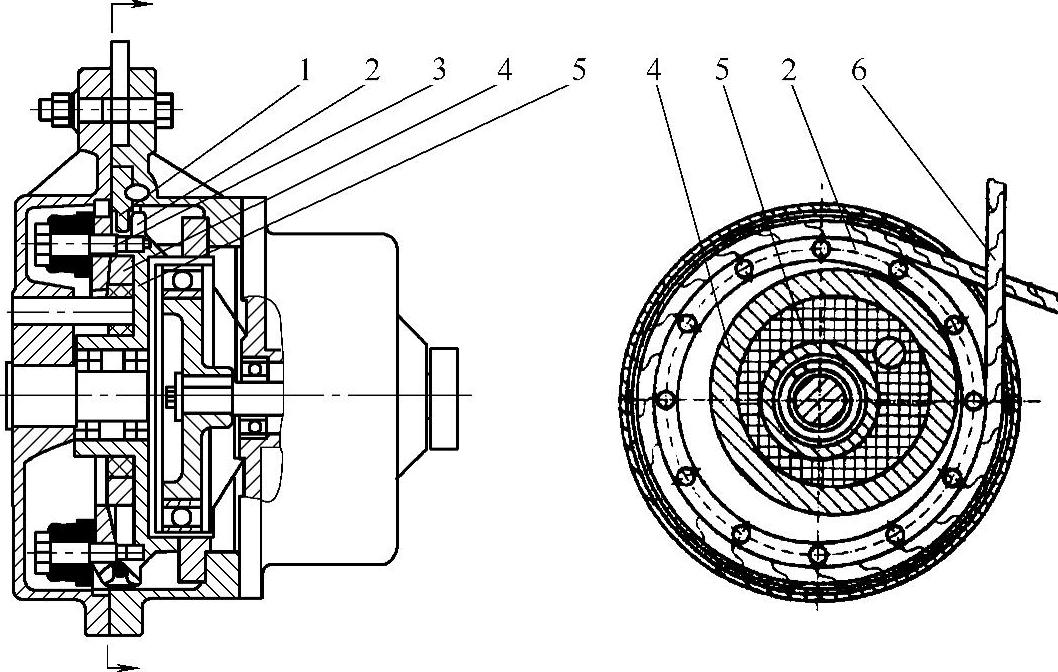
附图4-6 轴向夹紧式α形提升机
1—压盘 2—绳轮 3—碟形弹簧 4—胀环 5—偏心轮 6—钢丝绳
2)S形爬升式提升机。此类型提升机有两个绳轮。钢丝绳在提升机内以S形缠绕在两个绳轮上。钢丝绳在提升机内向两个方向弯曲,承受交变疲劳载荷,容易疲劳破坏。但由于经过两个绳轮缠绕,钢丝绳的包角较大,可提供较大的摩擦力。
附图4-7所示为典型的S形提升机,钢丝绳进入提升机后,先缠绕在下部的绳轮上,边绕边被压紧,然后向上绕过上部绳轮,边绕边放松,最后经出绳口穿出。钢丝绳在机内运动轨迹呈“S”形。在两个绳轮上均设有压盘。其夹绳方式与轴向夹紧式α形提升机的夹绳方式类似。
(4)减速部分
1)爬升式提升机减速部分的特点。提升机的绳轮转速一般在10~15r/min范围内,而电动机转速为1400r/min以上,显然必须经过减速部分减速增扭之后,方可使之匹配。减速比i=n1/n2,其中n1为电动机转速,n2为绳轮转速。由上述关系可知,爬升式提升机的减速比i=90~150。大传动比是爬升式提升机减速部分的特点之一。
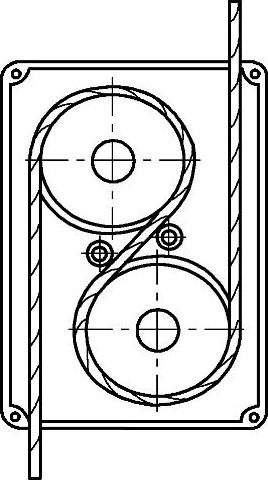
附图4-7 S形提升机
爬升式提升机一般与悬吊平台连接在一起,随悬吊平台一同升降。提升机的自重直接影响吊篮的有效载荷。另外,吊篮属于非常设式设备,需频繁拆装,所以希望各部件都比较轻巧。就提升机而言,减速部分占其自重的比重较大。因此追求结构紧凑、质量轻、效率高的传动方式是爬升式提升机减速部分的另一特点。
为适应爬升式提升机的特点,其减速机构的形式多种多样,应针对最常用的几种减速形式,进行对比选用。
2)圆柱齿轮减速机构。为满足爬升式提升机减速比i=90~150的要求,采用圆柱齿轮定轴传动的减速机构一般需采用三级减速传动,如附图4-8所示。
三级圆柱齿轮传动的优点是加工简单、成本较低,缺点是零件数量多、质量大、噪声大。
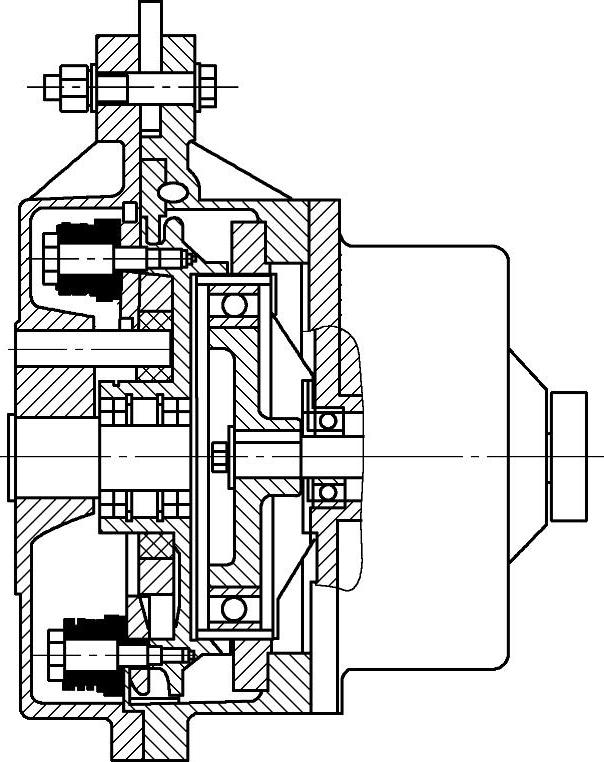
3)行星齿轮减速机构。采用行星齿轮的减速机构,一般只需二级减速传动即可满足传动比要求,如附图4-9所示。
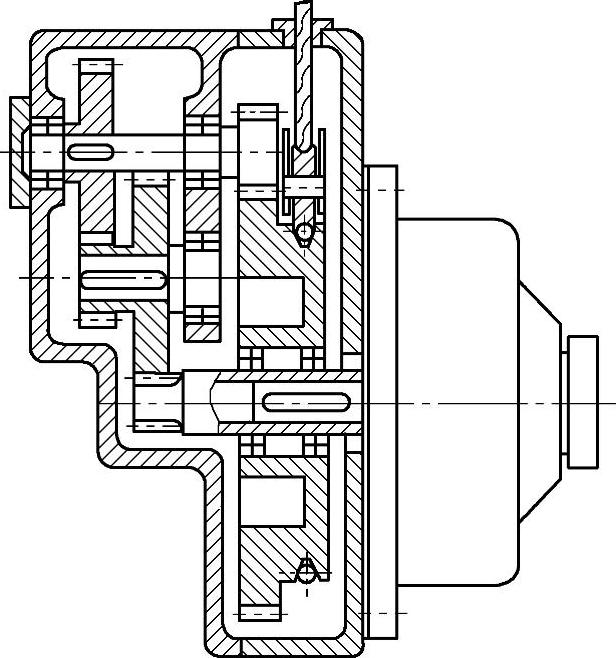
附图4-8 圆柱齿轮减速机构
附图4-9 行星齿轮减速机构
行星齿轮传动的特点:结构比较紧凑,噪声较小,传动效率高:零件数量较多,加工精度要求较高。
4)蜗杆减速机构。采用蜗杆减速机构,一般也只需二级减速传动,如附图4-10所示。(www.daowen.com)
蜗杆传动的特点:结构紧凑,零件较少,成本低,噪声低;但传动效率低,使用寿命短。经过改进蜗轮材料和参数,并且合理选用润滑油之后,蜗杆减速机构的特性大为改善,现被吊篮行业广泛采用。
5)谐波齿轮减速机构。谐波齿轮减速机构只需一级减速传动即可满足速比要求,如附图4-11所示。由谐波发生器、薄壁轴承、柔轮和钢轮等数个零件组成。
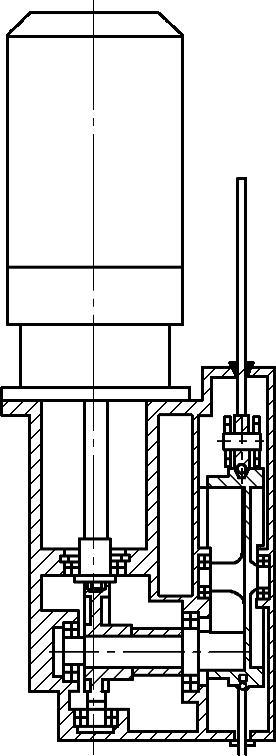
附图4-10 蜗杆减速机构
附图4-11 谐波齿轮减速机构
谐波齿轮传动的特点:结构紧凑,零件少,体积小,质量轻;高频噪声大,加工精度要求高,需专业厂进行加工。
6)其他型式减速机构。如少齿差行星传动和摆线针轮行星传动在爬升式提升机上都有应用。由于需要专业厂进行加工,而且其他优点并不突出,所以较少应用。
(5)动力部分。电动爬升式提升机绝大多数采用制动电动机作为动力,只有少数进口吊篮的提升机采用普通电动机作为动力,而另配制动器。
国产吊篮配备的制动电动机分两大类。一类是普通Y系列立式制动电动机,另一类是盘式制动电动机。
1)普通Y系列立式制动电动机。如附图4-12所示,Y系列制动电动机主要由定子、转子、摩擦盘、衔铁、手动松闸装置、弹簧和励磁线圈组成。
其工作原理是,接通三相电源后,在定子上产生旋转磁场,在转子上产生电磁转矩,使转子带轴旋转。与此同时,经过降压整流后的直流电源接通励磁线圈,使之产生轴向电磁吸引力,吸引衔铁克服弹簧弹力,松开摩擦盘解除制动。断电时,电磁转矩与电磁吸引力同时消失。在弹簧弹力作用下,衔铁压住制动盘。在摩擦力矩作用下,摩擦盘带动电动机轴停止转动。该制动器属于常闭式制动器。
2)盘式制动电动机。如附图4-13所示,盘式制动电动机主要由定子、转子、摩擦片、制动弹簧、轴和手动松闸装置组成。
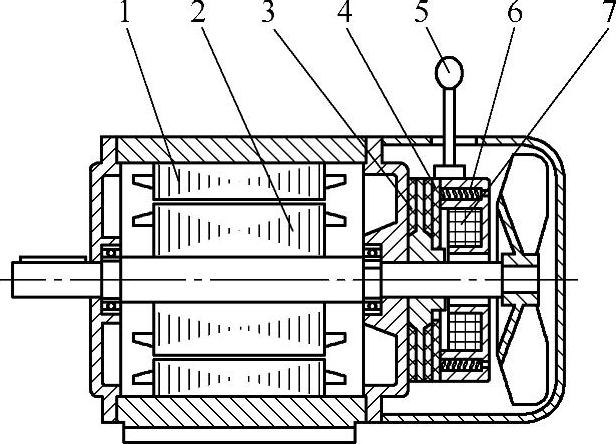
附图4-12 Y系列制动电动机
1—定子 2—转子 3—摩擦盘 4—衔铁 5—手动松闸装置 6—弹簧 7—励磁线圈
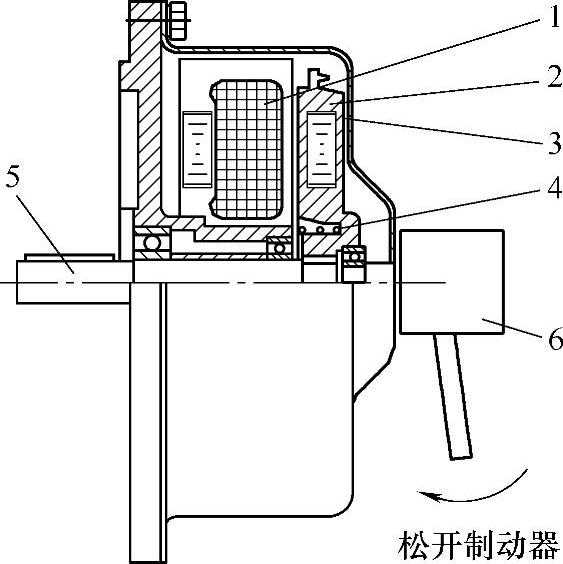
图4-13 盘式制动电机
1—定子 2—转子 3—摩擦片 4—制动弹簧 5—轴 6—手动松闸装置
其工作原理是,接通三相电源后,定子产生轴向旋转磁场,在转子导磁条中感应出电流并产生电磁转矩。与此同时,定子对转子产生轴向电磁吸引力,克服制动弹簧弹力,使摩擦片与机壳分离,解除制动,转子带动电动机轴转动。断电时,电磁转矩与吸引力同时消失。在制动弹簧的作用下,摩擦片与机壳摩擦产生制动力,使电动机立即停止转动。该制动器也属于常闭式制动器。
3.电动卷扬式提升机
电动卷扬式提升机在国产吊篮上几乎没有应用,仅在少数进口吊篮上有所应用。现简单介绍如下。
(1)工作原理 电动卷扬式提升机的基本组成和工作原理与普通卷扬机相似,都是由电动机、减速器、卷筒和制动器组成的。由电动机提供动力,经减速器减速增扭后,带动卷筒旋转,将钢丝绳缠绕在卷筒之上。由钢丝绳产生牵引力,牵引提升机带动悬吊平台升降。
(2)典型结构 与普通卷扬机相比,吊篮专用电动卷扬式提升机体积小、质量轻、机构紧凑、安全可靠,如附图4-14所示。
附图4-14a采用盘式制动电动机作动力,采用行星减速机构减速。钢丝绳缠绕在卷筒上。为使结构紧凑,还将减速机构设置在卷筒内部,以减少整机体积。常闭式电磁制动器设置在盘式电动机尾端,断电时抱死卷筒,使悬吊平台停止在工作位置上。附图4-14b所示的电动卷扬式提升机是普通电动机另配制动器的另一种结构型式。
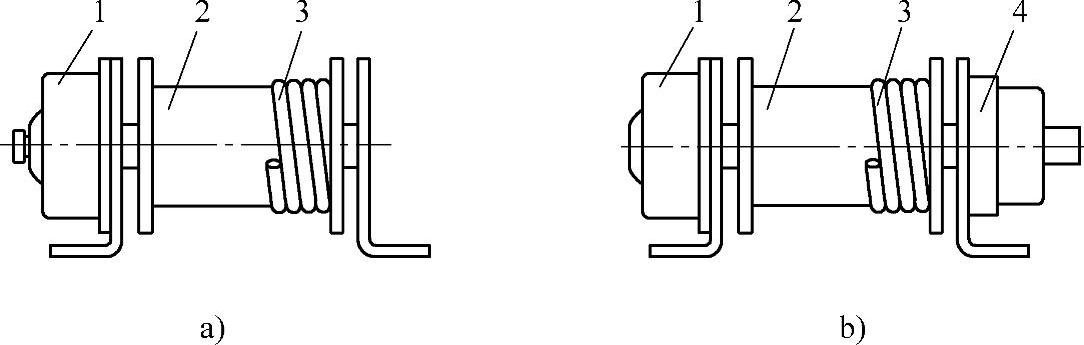
附图4-14 电动卷扬式提升机
1—盘式制动电动机 2—卷筒 3—钢丝绳 4—制动器
4.手动式提升机
手动式提升机以价格低廉、不使用能源的特点在吊篮上有所应用。手动式提升机有两种基本型式,一种是手摇式提升机,另一种是手扳式提升机。
手摇式提升机如附图4-15所示,仅以摇把代替电动机,以人力驱动代替电力驱动。其减速部件传动比小,夹(压)绳部分与电动爬升式提升机相似。
由于手摇提升机的作业效率太低,所以实际中应用不多。
手扳式提升机由起重用手扳葫芦演变而成,近几年经局部改造后应用在吊篮产品上。现着重介绍其工作原理和基本结构。手扳式提升机外形图如附图4-16所示。
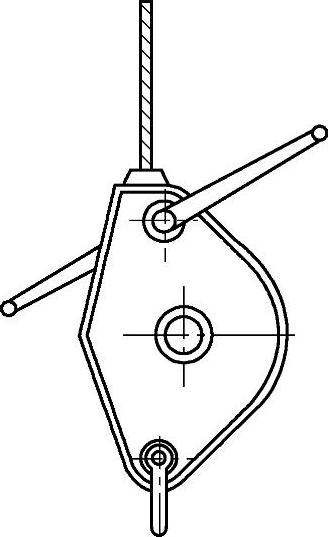
附图4-15 手摇式提升机外形图
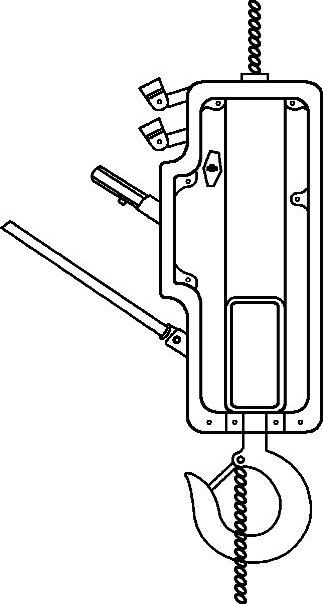
附图4-16 手扳式提升机外形图
手扳式提升机工作原理如附图4-17所示。其工作原理类似于爬树或爬杆,双手和双腿交替夹住树干,一步一步向上攀升。下夹钳和上夹钳轮流夹持钢丝绳。当向下扳动前进杆时,曲柄逆时针转动,带动下连杆使下滑块向下滑动,通过下夹紧杆,使下夹钳夹住钢丝绳,而曲柄逆时针转动,通过上连杆使上滑块向上运动。通过上夹紧杆使上夹钳分开,并且沿钢丝绳向上运行一段距离。相反,向上扳动前进杆时,上夹钳夹住钢丝绳,而下夹钳松开,并且沿钢丝绳又向上运行一段距离。如此往复扳动前进杆时,提升机则带动悬吊平台沿钢丝绳向上爬升。
相反,当往复扳动下降杆时,上、下夹钳则交替沿钢丝绳向下运行。
由此可见,手扳式提升机无论是向上或向下扳动前进杆或下降杆均是有效行程(即提升机均相对钢丝绳运行一端距离),而决定提升机升降方向的是扳前进杆还是扳下降杆。
HSS—16ZY型手扳式提升机的主要参数为:额定载重量为1600kg;行程(每扳动一次,提升机移动的距离)为400mm;手扳力小于或等于450N;扳动角度为60°。
5.提升机安全技术要求
提升机是吊篮的核心部件,其性能及技术状况直接关系到吊篮作业的安全性。国家标准对各类提升机都规定了安全技术要求。
(1)爬升式提升机的安全技术要求 制动器必须使带有125%额定载重量的悬吊平台,在不大于100mm滑移距离内停止运行;在承受静力试验载荷(即150%额定载重量)时,制动器作用15min,滑移距离不大于10mm;必须设有在断电时使悬吊平台平稳下降的手动滑降装置;传动系统在绳轮之前禁止采用离合器和摩擦传动;绳轮直径与钢丝绳直径之比不应小于20;电动机堵转转矩不低于180%的额定转矩;应具有良好的穿绳性能,不得卡绳和堵绳;所有转动的外露部分应设置机罩或防护装置。
附图4-17 手扳式提升机工作原理
1—前进杆 2—下降杆 3—曲柄 4—下滑块 5—下夹紧杆 6—下连杆 7—下夹钳 8—上连杆 9—上滑块 10—上夹紧杆 11—上夹钳 12—夹板
(2)电动卷扬式提升机的安全技术要求 禁止使用摩擦传动、带传动和离合器;必须设置手动升降机构;钢丝绳在卷筒上的固定应安全可靠,安全圈数不应少于3圈,并且能承受1.25倍钢丝绳额定拉力;必须设置钢丝绳的防松装置;钢丝绳在卷筒上应排列整齐;卷筒的最小卷绕直径为钢丝绳直径的19倍;排绳机构应使钢丝绳安全无障碍地通过,并正确地缠绕在卷筒上;制动器应能使125%额定载重量的悬吊平台停住。
(3)手动式提升机的安全技术要求 必须设有闭锁装置;当提升机变换升降方向时,应动作准确,安全可靠;施加于手柄的操作力不应大于250N。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







