控制部分以PIC16F877A单片机为核心,设计了新型悬吊作业平台安全锁试验台控制系统。应用该系统可实现检测过程的自动化操作,对悬吊作业装备安全锁的锁止位移、锁绳角度、自由坠落时锁绳制动距离、安全钢丝绳瞬间冲击力等性能指标实现实时显示和打印输出。下面给出其具体设计思路及模块工作原理的介绍。
1.自动检测装置控制系统设计方案
由于本系统实现功能较复杂,使用单一主控单元无法实现其全部控制功能。系统总体框图如图6-12所示,系统的主控单元可以分为时钟编号主控单元和检测主控单元。时钟编号主控单元由液晶显示部分、外部时钟部分、编号输入部分、打印输出部分组成;检测主控单元由信号采集部分、按键输入部分、强电控制部分、液晶显示部分、数据储存部分、打印输出部分组成。打印输出部分为两个主控单元共用。测试时,时钟编号主控单元首先启动,其程序执行完毕后检测主控单元启动。
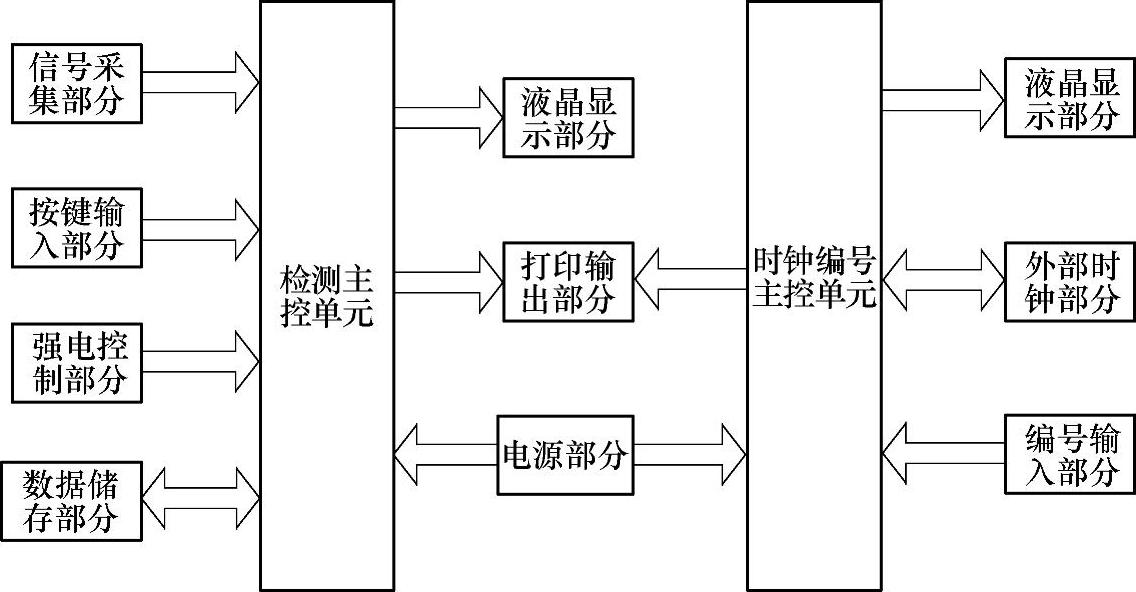
图6-12 系统总体框图
2.系统硬件设计
PIC16F877A单片机内部采用哈佛总线结构、精简指令集技术,指令单字节化、自身集成多种外围模块且具有寻址方式简单、运行速度快、功耗低、驱动能力强等优点。本系统的两个主控单元均采用PIC16F877A单片机。
在编号输入部分中,PIC16F877A单片机通过不间断地扫描时钟芯片和编号键盘来获取时间和实现编号的输入。当编号输入完毕后,单片机对当前时间及输入编号进行打印输出。在检测主控单元部分中,采集部分采集到的数据经PIC16F877A单片机处理后得出测试结果,并把此结果进行显示输出和打印输出。下面分别介绍各个硬件功能模块的设计。
(1)时钟编号主控单元
1)外部时钟模块设计。外部时钟模块为系统提供准确的测试时间。它将当前时间数据发送给单片机,单片机把此数据处理后进行显示、打印操作。这样就可以直观地观测并记录下实时时间和测试时间。本系统采用的时钟芯片为DS1302,它是由美国DALLAS公司推出的一种高性能、低功耗、带RAM的实时时钟芯片。它采用三线接口与PIC单片机进行通信,可以对年、月、日、周日、时、分、秒进行计时,具有闰年补偿功能。工作电压为2.5~5.5V,提供备用电源接口。其接口电路图如图6-13所示。其中Vcc2为主电源,Vcc1为备用电池组。系统掉电后由备用电池组供电,保证时钟的正常运行。
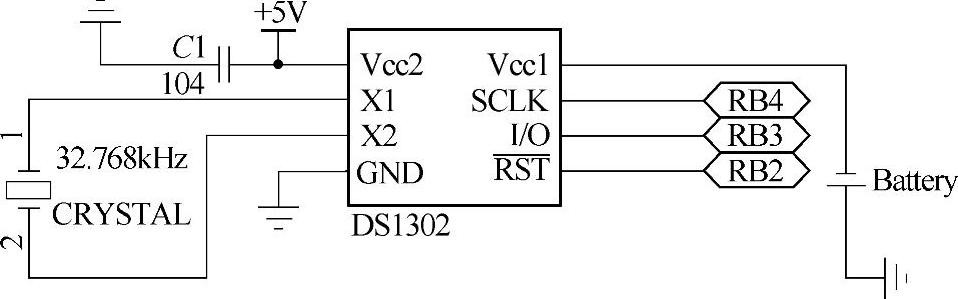
图6-13 外部时钟接口电路图
2)编号输入模块设计。系统通过编号输入模块来输入待测安全锁的编号,方便后续查阅。检测系统使用4×4矩阵键盘作为编号输入模块。单片机通过扫描矩阵键盘的各行各列来确定编号是否输入,其电路原理图如图6-14所示。
3)液晶显示模块设计。系统的液晶显示模块为ST7920芯片驱动的液晶显示器。液晶显示器与单片机按并行方式传输数据。液晶显示器数据线与单片机PORTD端口相连,液晶显示器的控制引脚CS、WR、E分别与单片机RE0、RE1、RE2三个接口相连,其接线图如图6-15所示。
4)打印输出模块设计。系统的打印模块为一个RD-DH48热敏微型打印机。打印机为串口RS-232电平通信,需把单片机TTL电平转换为RS-232标准电平。通信电平转化电路由围绕max232芯片构建,通过max232芯片把单片机TX、RX输出的电平转换为RS-232标准电平。系统的两套主控系统共用一台max323芯片及打印机,其通信原理图如图6-16所示。
(2)检测主控单元
1)信号采集模块设计。系统信号采集模块主要为通过角度和拉力两个传感器,来实现对角度和拉力信号的采集。在安全锁测试过程中,把角度、拉力等各种动态信号输入单片机。采集的信号通过PIC16F877A单片机自带的A/D转换模块进行模数转换,单片机对转换的数据做进一步分析处理。下面两个传感器的设计分别进行介绍。
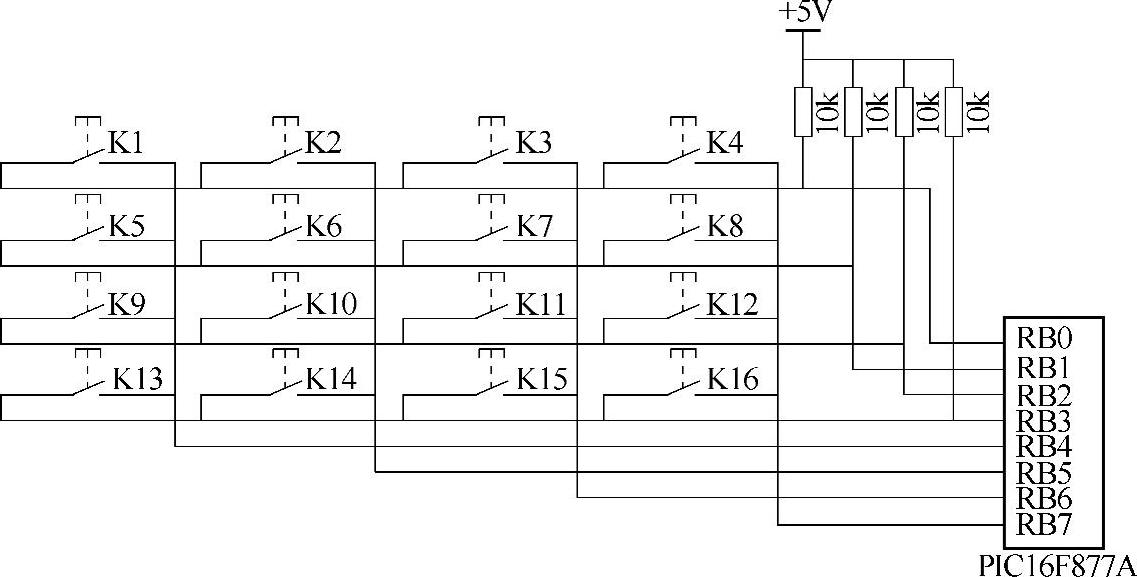
图6-14 编号输入电路原理图
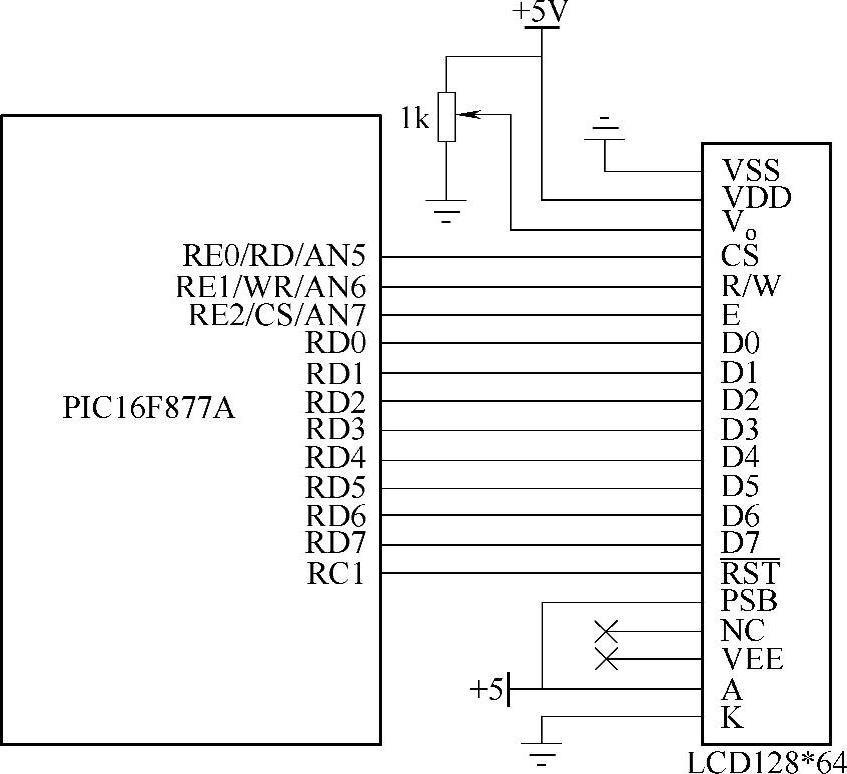
图6-15 PIC16F877A单片机与ST7920液晶显示器接线图
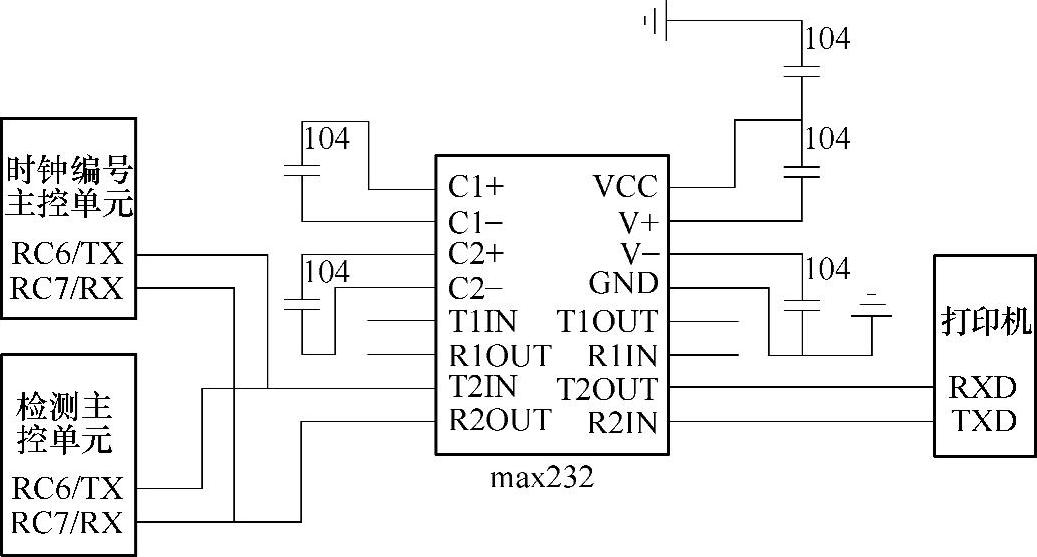
图6-16 两主控单元与打印机通信原理图
①角度传感器设计:通过角度传感器测量安全锁的锁绳角度,并将测得的锁绳角度经过运算得出安全锁的锁绳距离。本系统采用德国HY-LINE公司生产的SCA61T单轴倾角传感器,具有灵敏度高、长期稳定性好,温度特性优良,抗冲击能力强等特点。其输出电压与角度成三角关系,表达式为

式中 α——锁绳角度(°);(https://www.daowen.com)
Vout——SCA61T单轴倾角传感器的输出电压(V)。
锁绳距离与锁绳角度经过相关数学运算,可得出两者的线性关系,表达式为
L=35α (6-19)
式中 L——锁绳距离(mm);
α——锁绳角度(°)。
角度测量电路原理图如图6-17所示。
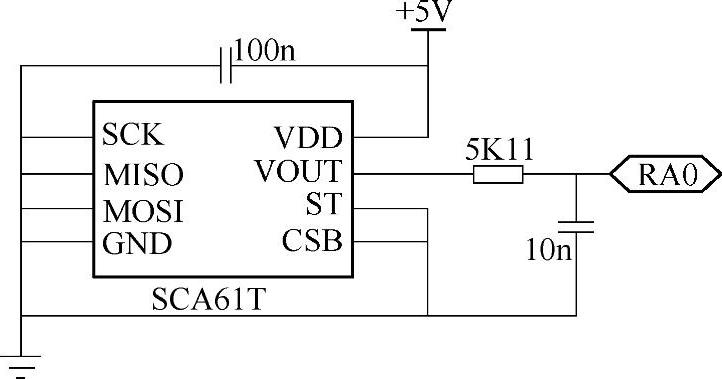
图6-17 角度测量电路原理图
②拉力传感器:拉力传感器采集安全锁坠落瞬间钢丝绳上的拉力值,并传送给单片机。本系统选用RSS02称重传感器采集拉力信号。拉力传感器内部有应变片,如果发生形变将会改变电阻值,将这个应变片置于一个电阻桥式电路中,外加一定电压,当发生形变时,在桥式电路的节点上便会产生电压的变化。电压的变化比较微弱,所以要经过变送器滤波放大成0~5V。
2)液晶显示模块设计。系统通过液晶显示模块显示当前的实时状态,实现系统的人机交互,增强了系统的可操作性。系统选用具有320×240的高分辨率的
5.7inRA8806芯片液晶屏。该款液晶屏功能强大,支持水平和垂直字型放大、粗体字和行与行间距设定、支持图文混排,包含中文字库和ASCII字体的ROM。数据总线与单片机PORTD口并行连接,其控制引脚RS、/WR、/RD、/CS1、RST分别与单片机RE0、RE1、RE2、RC0引脚相连。其接线图如图6-18所示。
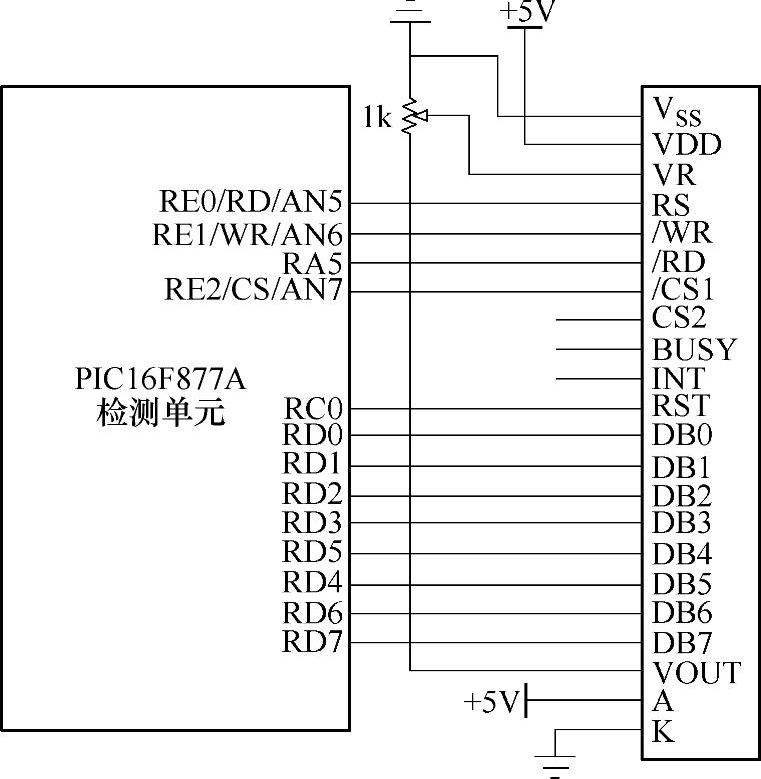
图6-18 PIC16F877A单片机与RA8806液晶显示器接线图
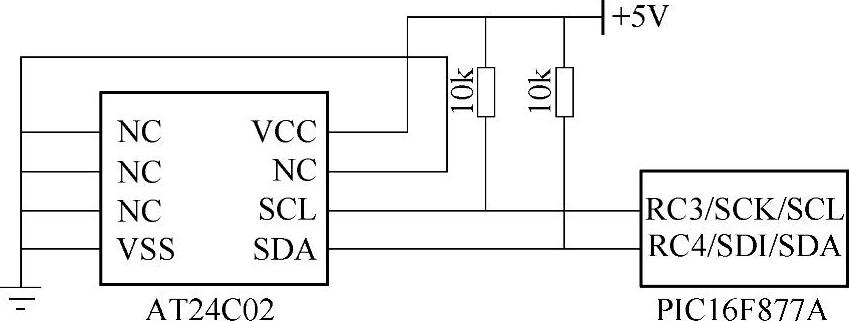
图6-19 数据储存电路原理图
3)数据储存模块设计。系统具有设置水平基准面的功能,即可人工设置水平基准。人工设置的水平基准数据需要储存以便调平时读取,且当掉电、复位时数据不会丢失,故设计外设E-2PROM。选用24C02芯片作为外扩E2PROM,它是一款容量为32kB的串行E2PROM芯片,通过I2C协议与单片机进行通信,其电路原理图如图6-19所示。
4)强电控制模块设计。系统需驱动电动机正反转、状态指示灯等相关强电部分,选用固态继电器作为系统的执行器件。系统将单片机输出的电压和电流信号经ULN2003AN芯片放大后驱动固态继电器,设计也实现了控制端和负载端的隔离。PIC16F877A单片机的RC1、RC2、RB1、RB2四个引脚控制四个继电器。RC1控制电动机正转,RC2控制电动机反转,RB1控制红色状态指示灯,RB2控制绿色状态指示灯。当系统准备就绪时绿色指示灯亮,当在测试过程中时红色指示灯亮。引脚输出电平为“1”时,经反相放大器ULN2003作用,继电器输入电压为“0”,继电器闭合执行相应动作;引脚输出电平为“0”时,继电器输入电压为“1”,继电器断开。
5)打印输出模块设计。检测主控单元的与时钟编号主控单元共用一台max232芯片,与同一台打印机进行通信。
3.系统软件设计
整个系统的软件采用C语言模块化方式进行编写,时钟编号主控单元系统程序设计分为DS1302时钟读取模块、按键扫描模块、液晶显示模块、打印模块;检测单元系统程序设计分为系统初始化模块、系统调平模块、系统动作模块、AD转换模块、显示模块、打印模块、片外储存模块。图6-20和图6-21所示为两单元系统软件流程图。
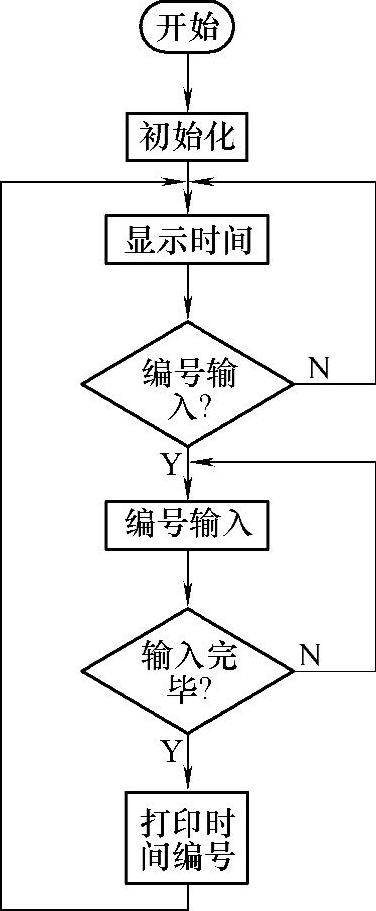
图6-20 时钟编号单元系统软件流程图
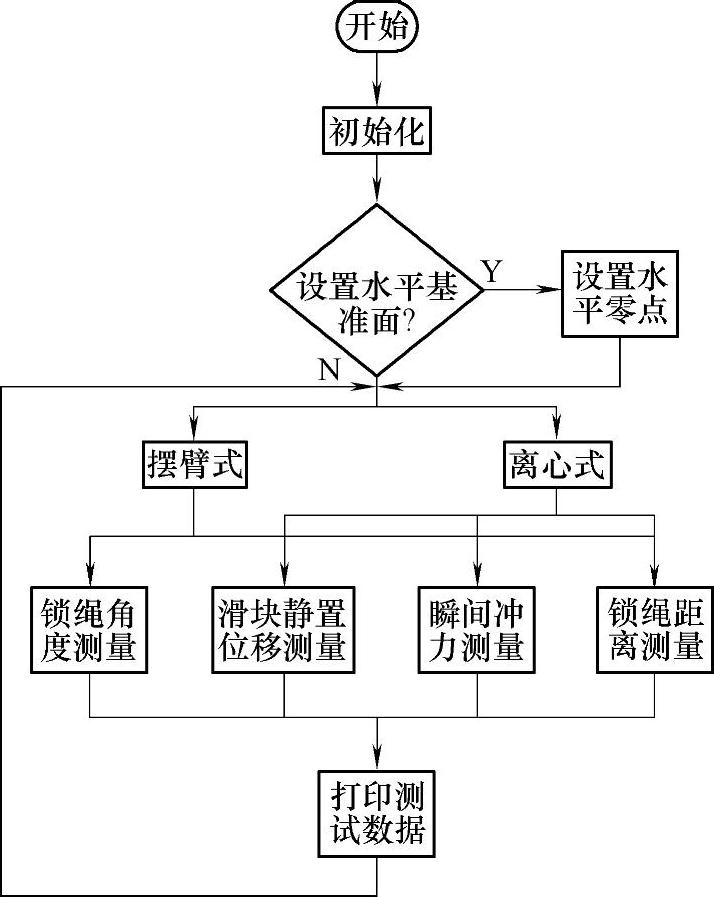
图6-21 检测单元系统软件流程图
系统测试开始时,时钟编号主控单元首先启动,单片机对各模块进行初始化操作。初始化完成后,扫描DS1302时钟芯片读取时间数据,并在液晶屏上显示。而后对编号键盘进行扫描,扫描结束后,若无按键按下则返回扫描DS1302时钟芯片,程序流程结束,下一次循环开始;若有按键按下,单片机则将此按键数据记录并实时显示在液晶屏上。当完成一个数据输入后,系统进行输入完毕判别。若经判别输入完毕,打印机自动打印当前时间和输入的编号;若经判别未输入完毕,则返回编号输入程序继续输入,直至判别输入完毕后打印机自动打印。打印完毕后,程序流程结束,继而返回扫描DS1302芯片,下一次循环开始。时钟编号主控单元工作完毕后,检测单元开始进行检测。单片机首先对系统各模块进行初始化操作。初始化中包括对测试平台的自动调平,初始化完毕后,系统进行是否人工设置水平基准面判别。若操作人员对初始化时自动调平的结果满意,即可进入后续检测程序;若对自动调平结果不满意,可进入人工设置水平零点模式。人工水平零点设置完毕后,系统自动将当前的角度数据储存到存储模块中,下次自动调平则以此角度数据为基准进行调平。人工设置水平基准面完成后,根据待测安全锁的种类选择相应的测试模式。若待测安全锁为摆臂式,系统进行锁绳角度测量、滑块静置位移测量、瞬间冲击力测量和锁绳距离测量;若待测安全锁为离心式,进行滑块静置位移测量、瞬间冲击力测量和锁绳距离测量。测量全部完成后,打印机将打印测试数据,程序流程结束,继而返回检测模式判别程序,下一次循环开始。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






