有限元分析方法是将结构细分成有限个单元,每个单元以节点相连,两相邻单元共用节点的位移、斜率、曲率必须一致,而两节点之间的位移则与节点位移和变形函数相关。将载荷作用于节点,不论结构多么复杂,利用有限元法将其离散化,建立的方程式均为统一的矩阵形式。以静态强度分析为例,系统方程式[11-14]如下
[K]{X}={F} (3-1)
式中 [K]——刚度矩阵,表示节点载荷{F}与节点自由度位移{X}的相关性。
有限元法将结构(或物理系统)分割成单元,并接合在一起形成网架结构,相邻元素有共同的节点,元素内部的变形位移量(或物理量)近似地以节点位移量(或物理量)的内插函数表达。作用在结构(或物理系统)上的外力及力矩作用在节点上,因此由节点的作用效应及节点反应关系式构成了结构(或物理系统)的离散化方程式,在已知作用外力及力矩(或外激效应)时,求解此方程式,得到结构在各节点的位移(或物理量)。
其分析计算的思路可归纳如下:
(1)物体离散化 将某个工程结构离散为由各种单元组成的计算模型,这一步称作单元剖分。离散后单元与单元之间利用单元的节点互相连接起来;单元节点的设置、性质、数目等应视问题的性质、描述变形形态的需要和计算精度而定。一般情况下,单元越细则描述变形情况越精确,即越接近实际变形,但计算量也越大。所以,有限元中分析的结构已不是原来的物体或结构体,而是同样材料的由众多单元以一定方式连接成的离散物体。这样一来,用有限元分析计算所获得的结果只是近似的。如果划分单元数目足够多而又合理,则所获得的结果就与实际情况足够接近。
(2)单元特征分析
1)选择位移模式。在有限元法中,选择节点位移作为基本未知量时称为位移法;选择节点力作为基本未知量时称为力法;取一部分节点力和一部分节点位移作为基本未知量时称为混合法。位移法易于实现计算机自动化,所以在有限元法中位移法应用范围最广。当采用位移法时,物体或结构离散化之后,就可把单元中的一些物理量如位移、应变和变力等由节点位移来表示。这时可以对单元中位移的分布采取一些能逼近原函数的近似函数予以描述。通常,在有限元法中我们将位移表示为坐标变量的简单函数,这种函数称为位移模式或位移函数。
2)分析单元的力学性质。根据单元的材料性质、形状、尺寸、节点数目、位置及其含义等,找出单元节点力和节点位移的关系式,这是单元分析中的关键一步。此时需要应用弹性力学中的几何方程和物理方程来建立力和位移的方程式,从而导出单元刚度矩阵,这是有限元法的基本步骤之一。
3)计算等效节点力。物体离散化后,假定力是通过节点从一个单元传递到另外一个单元的,但是对于实际的连续体,力是从单元的公共边界传递到另外一个单元中去的。因此,这种作用在单元边界上的表面力、体积力或集中力都需要等效地移到节点上去,也就是用等效的节点力来替代所有作用在单元上的力。
4)单元组集。利用结构力的平衡条件和边界条件,把各个单元按原来的结构重新联系起来,形成整体的有限元方程为
[K]{X}={F} (3-2)
式中 [K]——刚度矩阵,表示节点载荷{F}与节点自由度位移{X}的相关性。
5)求解位置节点位移 解有限元方程式得出位移,可以根据方程组的具体特点来选择合适的计算方法。
1.静力分析中的计算载荷与载荷工况
作用在施工平台结构上的外载荷有:起升载荷、结构自重载荷、突然起动制动时的冲击载荷、风载荷以及人为斜拉悬吊平台产生的载荷。这些载荷的共同作用构成了静力分析的计算载荷。下面分别对每种载荷进行数值计算:
(1)起升载荷Q 本节以ZLP800型高空作业施工装备的平台为计算模型,额定载荷为800kg,进行静力分析时按照最大起升量计算,则起升载荷为
Q=m重g=800×10N=8000N (3-3)
(2)结构自重载荷W 施工平台的自重主要包括悬吊平台、悬挂机构、提升机、钢丝绳,其中平台部分包括提升机的质量为650kg,悬挂机构的质量为450kg,钢丝绳按照32.4kg/100m计算。利用ANSYS软件,根据达朗贝尔原理计算惯性力(包括重力),在对施工平台结构进行分析时,输入重力加速度,系统会自动计算出结构的自重,均匀地施加在结构上。
作用于悬挂机构上的自重载荷(钢丝绳按照100m计算)
W=(m台+m重)g=(650+32.4)10N=6824N (3-4)
(3)风载荷PW 施工平台在高空作业时要承受一定的风载荷,根据GB19155—2003的规定,在设计施工平台结构时,应考虑风载荷的影响:在工作状态下,应能承受的基本风压值不低于500Pa;在非工作状态下,当施工平台安装高度不高于60m时,应能承受的基本风压值不低于1915Pa,每增高30m,基本风压值增加165Pa;施工平台的固定装置结构设计风压值应按1.5倍的基本风压值计算[15]。
施工平台在高空作业时,风载荷作用于悬吊平台钢架结构以及作业人员上,使悬吊平台在工作平面内轻微晃动,起升钢丝绳跟随悬吊平台一起摆动,将使钢丝绳与竖直方向产生一个倾角,进而将对悬挂机构产生横向载荷作用。倾角越大,悬挂机构受到的横向载荷就越大。风载荷的计算可根据国家标准GB19155—2003中规定的风压值以及GB/T 3811—2008《起重机设计规范》中给出的风载荷计算方法进行计算得到,当起升钢丝绳的长度较大时,钢丝绳上所受的风载荷也应予以考虑。
对于ZLP800型高空作业施工装备平台,其悬吊平台部分长度为7.5m,宽度为0.69m,两侧围栏高度为1.1m,按照工作时可承受的最大风压为500Pa计算,悬吊平台宽度方向的结构充实率按0.549计算,长度方向结构充实率按0.24计算,则可以分别得到悬吊平台上宽度方向和长度方向的风载荷[16]为
Pw=CPiA (3-5)
式中 C——风力系数;
Pi——工作状态的计算风压(N/m2);
A——构件垂直于风向的实体迎风面积(m2)。
故可计算得到悬吊平台的风载荷为  。
。
钢丝绳上的风载荷按照风力系数计算,钢丝绳长度按照100m计算,每个施工平台工作时有两根钢丝绳承受风载荷,故计算得  。
。
则总的风载荷为

(4)人为斜拉悬吊平台产生的横向载荷 人为导致的悬吊平台偏移对悬挂机构产生的作用力可以通过钢丝绳的偏移角度来计算,设钢丝绳在YOZ平面内的偏移角度为α,在XOY平面内的偏移角度为β。
对于本机型悬吊平台,自重加上额定载重量总和为1450kg,如果钢丝绳的偏移角度为α=5°或β=5°,再考虑施工平台的动载荷系数为1.25,则人为斜拉悬吊平台产生的载荷为
PMZ=1.25(Q+W)tanα=1.25×(8000+6824)N×tan5°≈1621N (3-6)
根据GB 19155—2003的规定,以及对施工平台在施工现场使用情况的了解,本章主要对以下四种载荷工况进行静力学分析,额定载荷均布;125%额定载荷均布(承受动力试验载荷);额定载荷偏置(标准中规定试验偏载荷是指重心位于悬吊平台一端总长度1/4处的额定载重量所产生的重力);横向载荷作用(风载荷及人为造成的横向载荷,考虑到风载荷和人为造成的横向载荷同时出现的可能很小,因此进行分析加载时选择二者中较大的一个作为横向载荷进行求解计算)。
2.整机有限元模型额定载荷静力分析
对施工平台整机有限元模型进行静力学分析,需要对模型进行约束处理。由于悬吊平台通过钢丝绳与悬挂机构进行连接,所以整机的约束包括悬挂机构及平台两部分。在进行约束过程中,需要采用刚性的钢丝绳将这两部分连接起来,进而解决结构可能出现的欠约束问题,通过调整约束形式能准确客观地反映设备在运行中的真实状态。在静力分析过程暂不考虑悬吊平台、钢丝绳振动对结构产生的冲击效应。根据理论计算及力学分析得到,在整个承载作用传递中悬挂机构承受了包括起重量在内的整个悬吊平台重量,其承受载荷最大,结构也最容易出现危险,因此悬挂机构有限元模型静力学分析是整机的研究重点。
施工平台结构有限元静力分析的加载及求解过程:
1)定义有限元分析类型。在ANSYS软件中用于定义静力学分析的选项为A-nalysis Type>Static。
2)约束的处理。施工平台整机系统工作时,悬挂机构固定于建筑物屋顶相对较平整的地方,悬挂机构前端悬臂段伸出屋顶边缘一段距离。悬吊平台通过起升钢丝绳与悬挂机构相连接,连同提升机、安全锁等构成施工平台的起升系统,悬吊平台与建筑物外立面接触点安装有靠墙轮机构,当施工平台沿竖直方向上下运动时,靠墙轮机构会使悬吊平台较平稳地实现升降运动。
在整机运转过程中,悬挂机构属于固定装置,也是起升载荷的主要承载机构,从整机的安全性、稳定性、可靠性等角度考虑,悬挂机构的作用尤为重要。对施工平台整机系统进行有限元静力分析时,由于施工平台整机主要由悬挂机构、钢丝绳及悬吊平台组成,钢丝绳属于柔性体,通过提升机-钢丝绳系统把各部分连接构成整个起升系统。外载荷作用于悬吊平台,载荷通过平台传递到钢丝绳,再传递到悬挂机构,同时悬挂机构又承受平台自重,最终由额定载荷及平台自重共同构成了起升载荷,并以集中力的形式作用于悬挂机构前悬臂梁的钢丝绳悬吊点处,也就是说,悬挂机构是载荷的最终承受者。
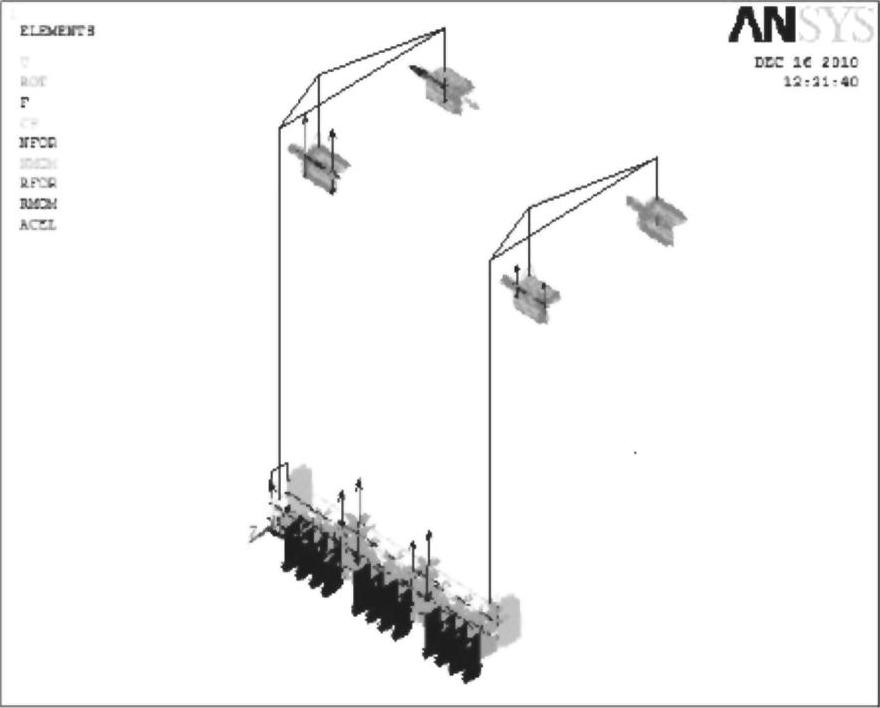
图3-1 整机模型静力分析加载图
依据ANSYS静力分析方法,对整机模型在额定载荷作用下的位移应力情况进行求解计算,整机模型静力分析加载图和额定载荷下整机模型静力分析位移云图如图3-1、图3-2所示。
从图3-1、图3-2中可以看到整机结构受额定载荷时的变形情况,图中反映的是整体位移,而本章静力学分析的目的是找出结构在多种工况下最危险的情况,因此应该有针对性地以某一部分作为研究对象,来分析其强度、刚度等力学特性。
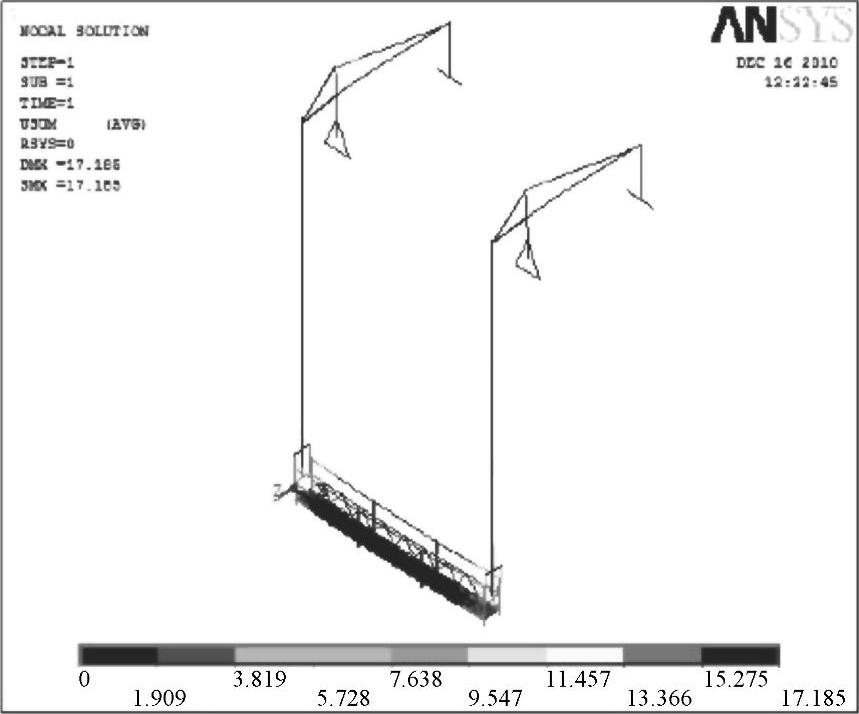
图3-2 额定载荷下整机模型静力分析位移云图
从上述分析中可以看出,对施工平台整机有限元模型进行静力学分析,需要对模型进行约束处理。由于悬吊平台通过钢丝绳与悬挂机构进行连接,单纯约束悬挂机构并不能使整机结构达到静定状态,如果不约束悬吊平台,则结构处于欠约束状态,ANSYS无法进行求解计算。如果将悬吊平台施加约束,又不能准确客观地反映出设备在运行中的真实状态。同时,静力分析过程暂不考虑悬吊平台、钢丝绳振动对结构产生的冲击效应。根据理论计算及力学分析,可以知道在整个承载链中,针对悬挂机构的静力学分析十分必要。为了优化分析过程,节省计算时间及计算机资源,对施工平台整机结构静力学分析的模型进行进一步等效简化处理,分别针对上述四种载荷工况,制订了以下几种简化方案:
1)悬吊平台受均布的额定载荷作用,这种情况下,将均布的额定载荷以等效力的形式平均分配到两根起升钢丝绳,进而以集中力的形式施加于悬挂机构前端悬吊点处。两悬挂机构受载情况相同,分析其中一侧即可。该工况下悬挂机构所承受的起升载荷为:
P起=(W+Q)/2=(6824+8000)N/2=7412N (3-7)
ANSYS静力求解结果如图3-3~图3-6所示。

图3-3 悬挂机构约束加载情况
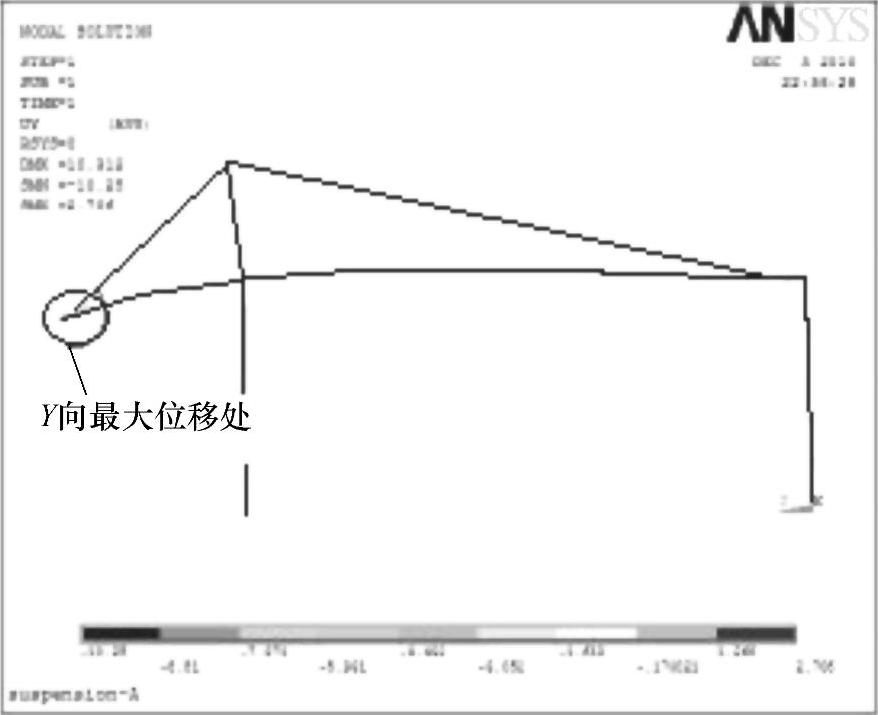
图3-4 工况一载荷作用下的竖向位移UY
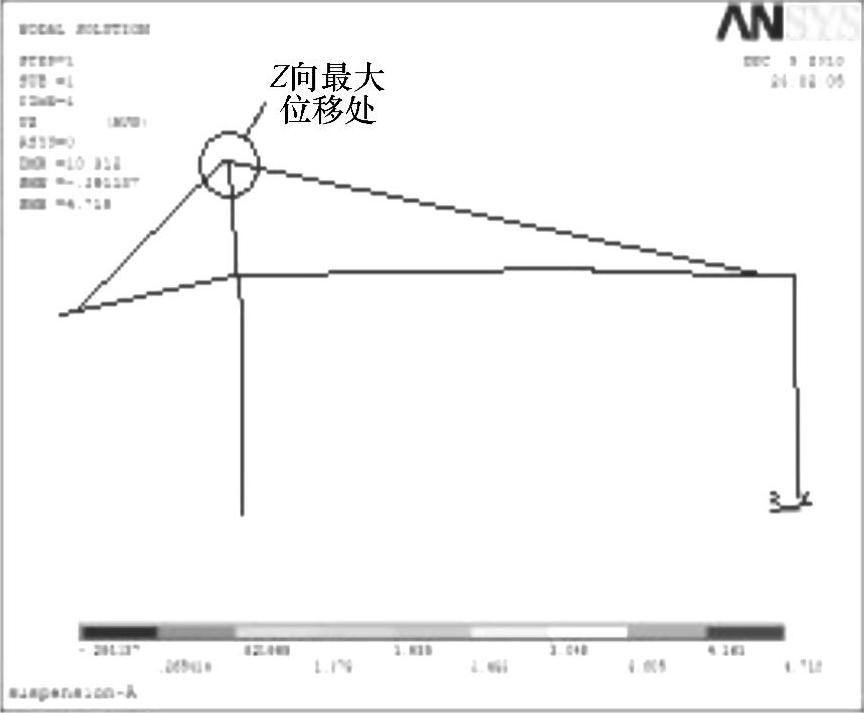
图3-5 工况一载荷作用下的竖向位移UZ
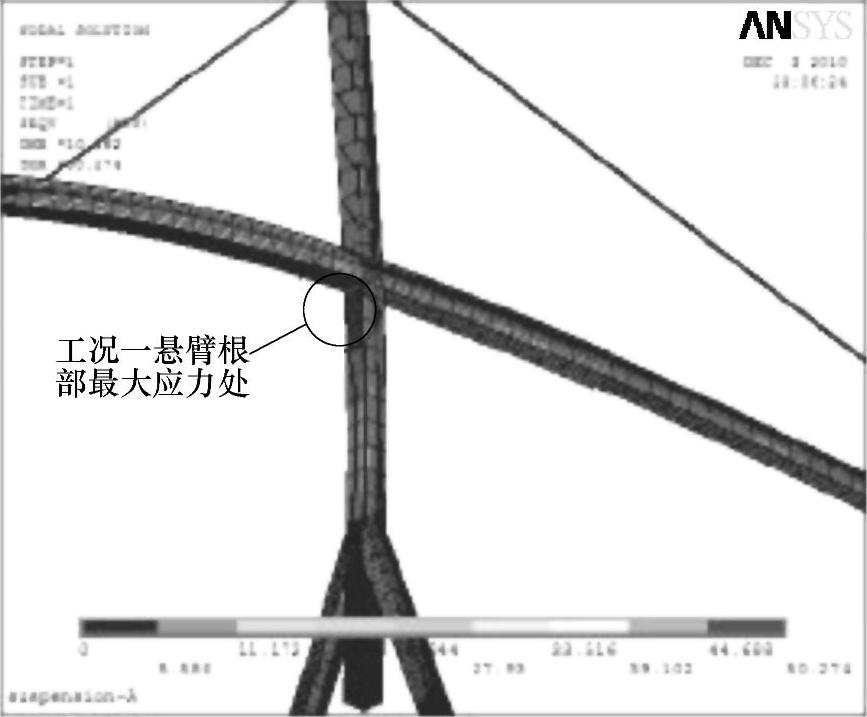
图3-6 工况一载荷作用下的应力图
2)标准规定施工平台在动力试验时,应有超载25%额定载重量的能力,因此对承受125%的额定载重量的工况进行分析。载荷均布于悬吊平台,两悬挂机构的受载情况相同,分析其中一侧即可。该工况下悬挂机构所承受的超载载荷为
P起=(W+125%Q)/2=(6824+1.25×8000)N/2=8412N (3-8)
ANSYS静力求解结果如图3-7~图3-9所示。
3)悬挂机构承受的横向载荷主要有风载荷和人为造成的横向载荷。当高空作业施工装备中平台在有风天气中作业时,悬吊平台需要承受一定的风载荷,同时起升载荷也同样存在,这时候悬挂机构在竖直及水平方向上同时受载。在利用AN- SYS进行分析计算时,先将风载荷对悬吊平台的作用力等效到悬挂机构上,分析时将两个方向的载荷同时加在悬挂机构前端悬吊点处。(https://www.daowen.com)
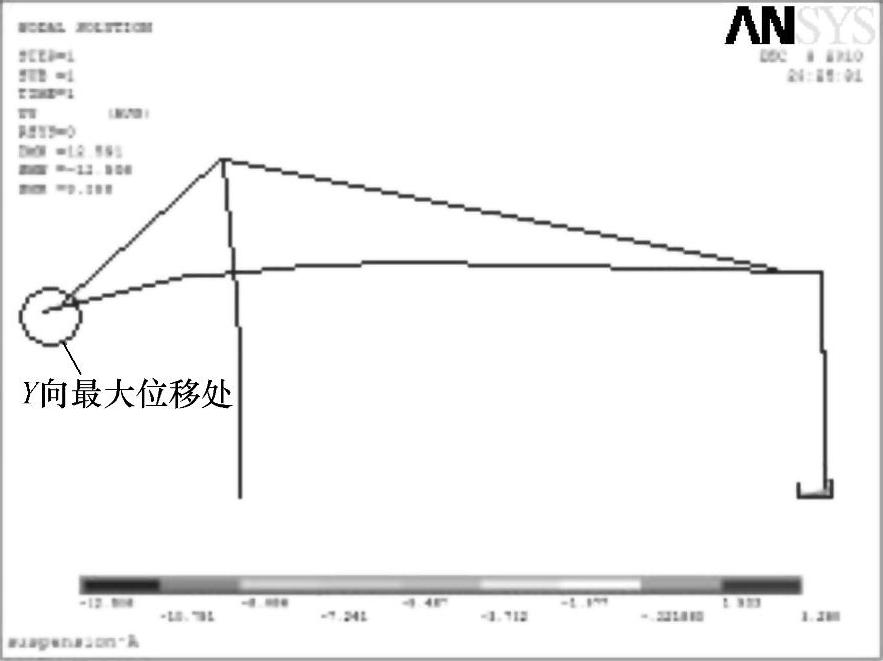
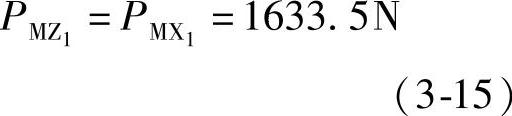
图3-7 工况二载荷作用下的竖向位移UY
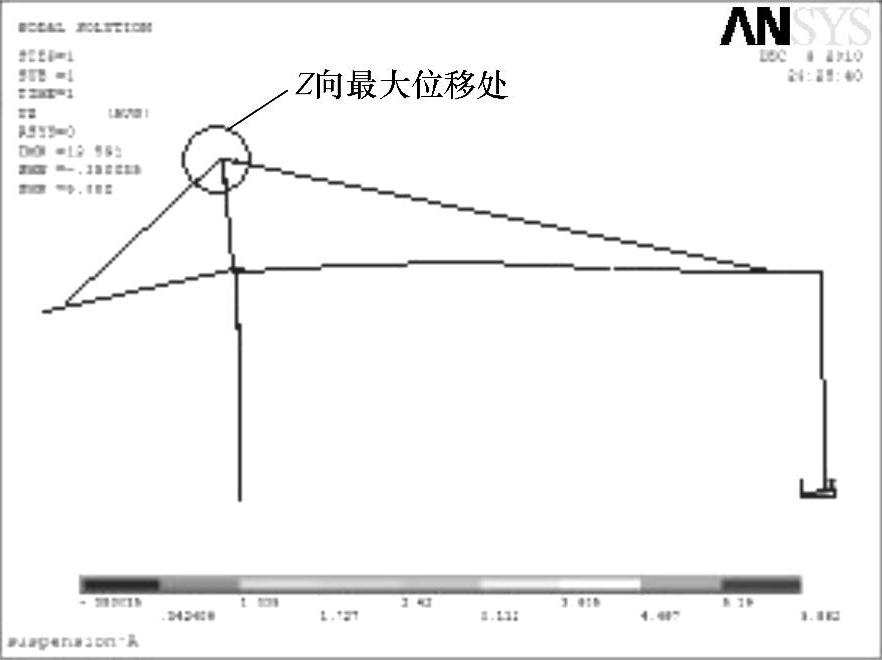
图3-8 工况二载荷作用下的竖向位移UZ
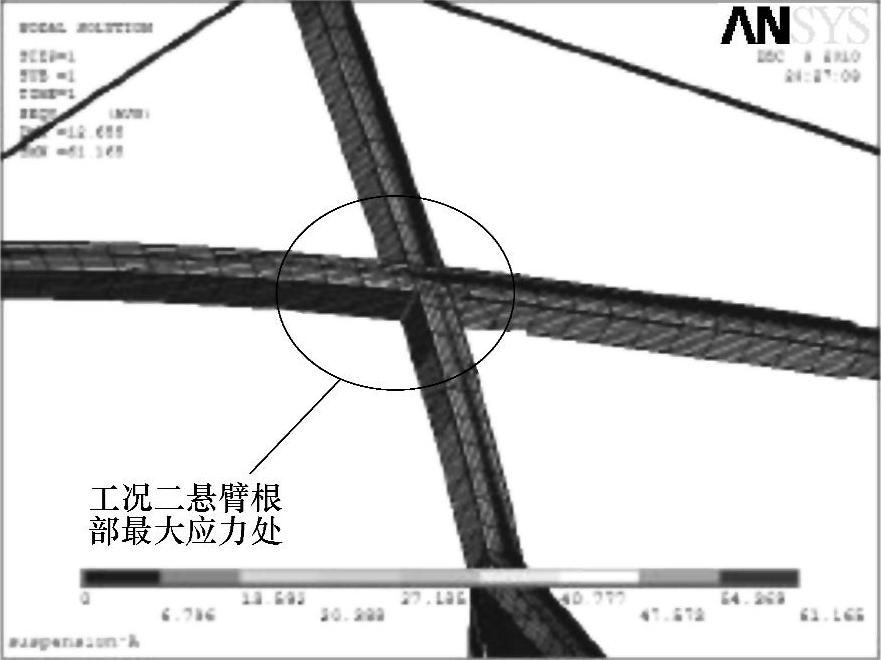
图3-9 工况二载荷作用下应力图
P起=(W+125%Q)/2=(6824+1.25×8000)N/2=8412N (3-9)

人为造成的悬吊平台偏移所产生的横向载荷为
PMZ=PMX=1621N (3-12)
每个悬挂机构受载为

当悬吊平台偏移角度α=10°或β=10°,则人为导致的横向载荷为:
PMZ=PMX=1.25(Q+W)=1.25×(8000+6824)N×tan10°=3267N (3-14)
每个悬挂机构受到的横向载荷为
当人为造成悬吊平台偏移的角度大于6°时,人为造成的X方向水平载荷大于该方向的风载荷,Z方向的水平载荷主要是风载荷的作用力。只有当人为造成悬吊平台偏移的角度超过13°时,人为造成的水平载荷才大于风载荷。
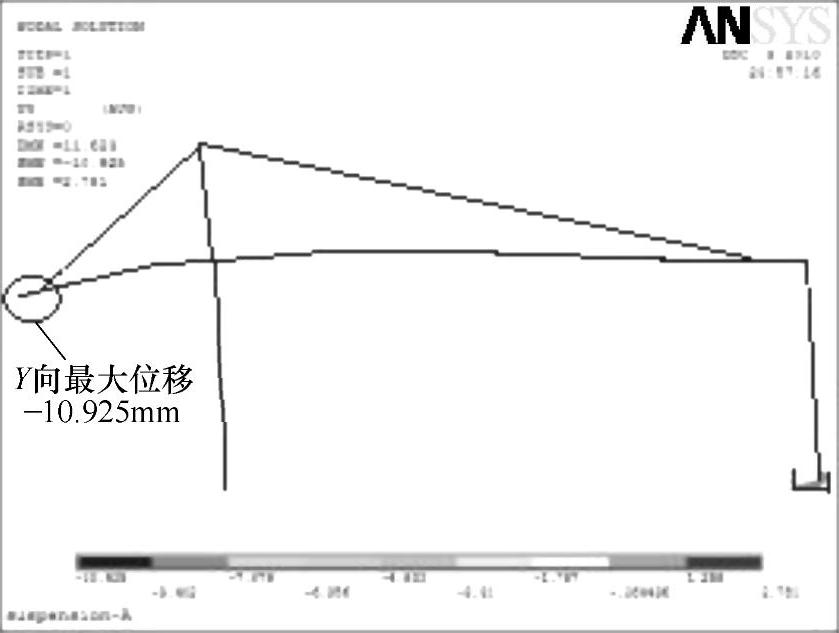
图3-10 +Z向水平力作用下Y向位移
当悬吊平台承受Z向水平载荷作用时,ANSYS静力学结果如图3-10~图3-15所示。
图3-11 +Z向水平力作用下Z向位移
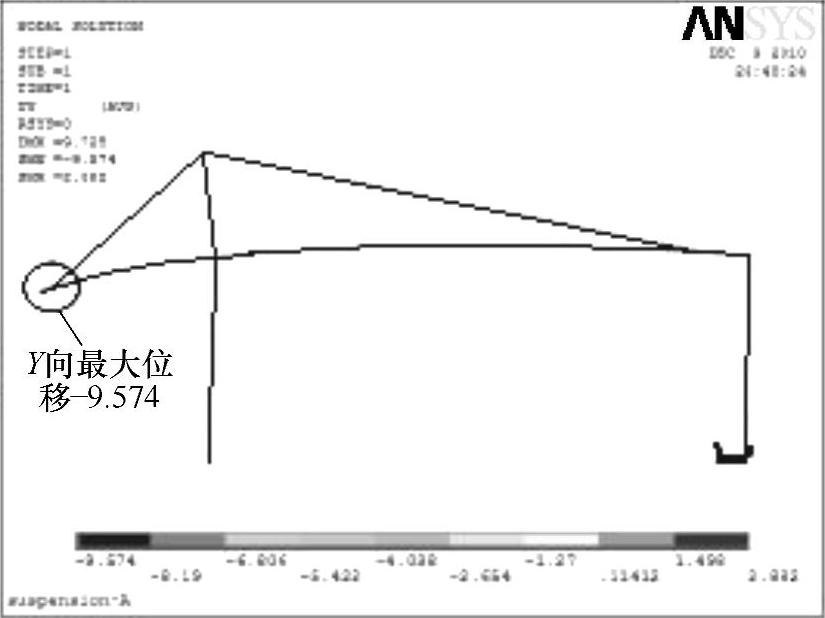
图3-12 -Z向水平力作用下Y向位移
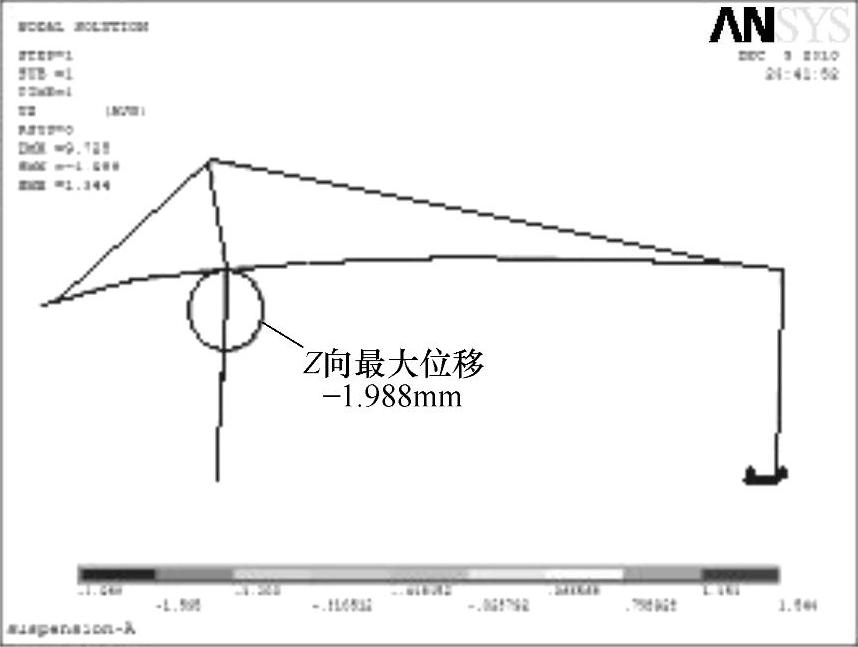
图3-13 -Z向水平力作用下Z向位移
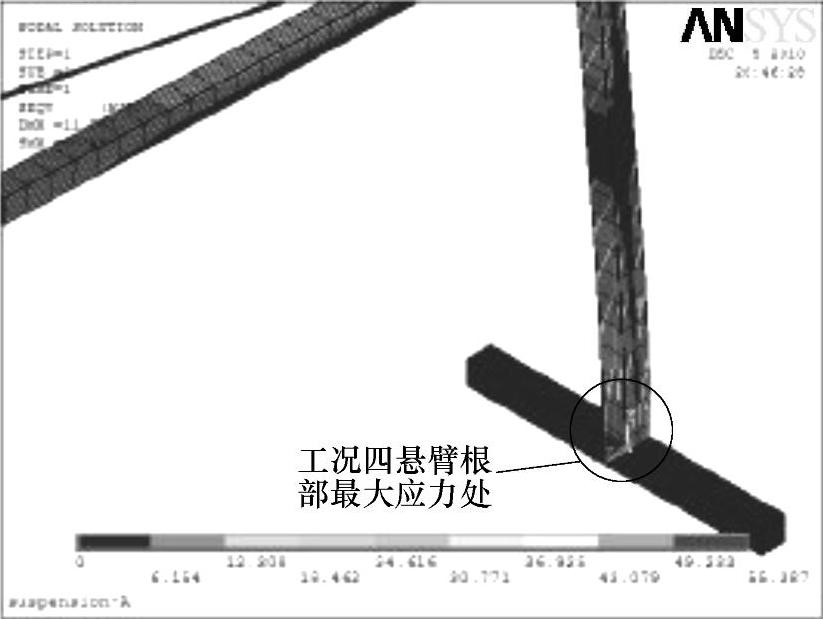
图3-14 +Z向水平力作用下应力图
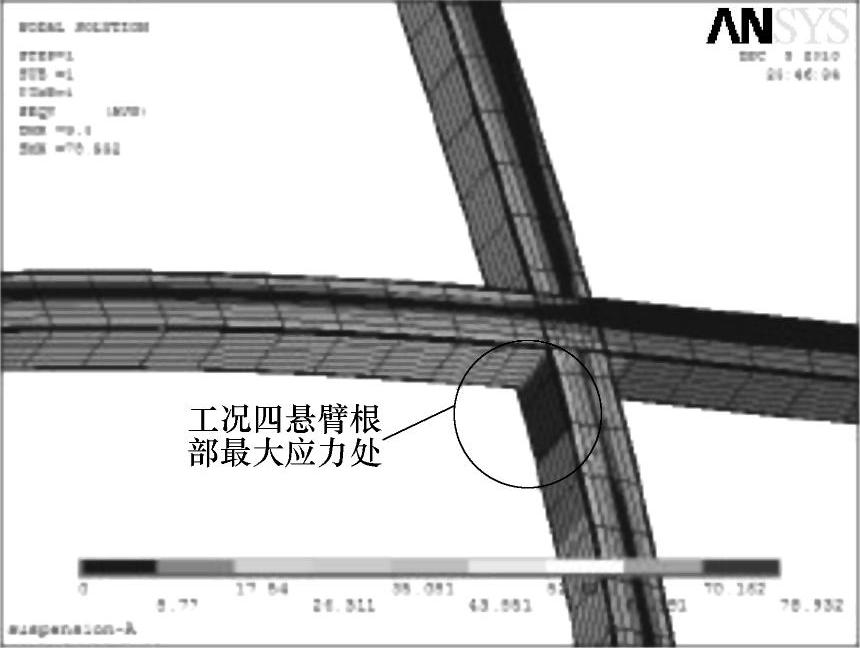
图3-15 -Z向水平力作用下应力图
当悬吊平台承受X向水平载荷作用时,ANSYS静力学结果如图3-16~图3-19所示。
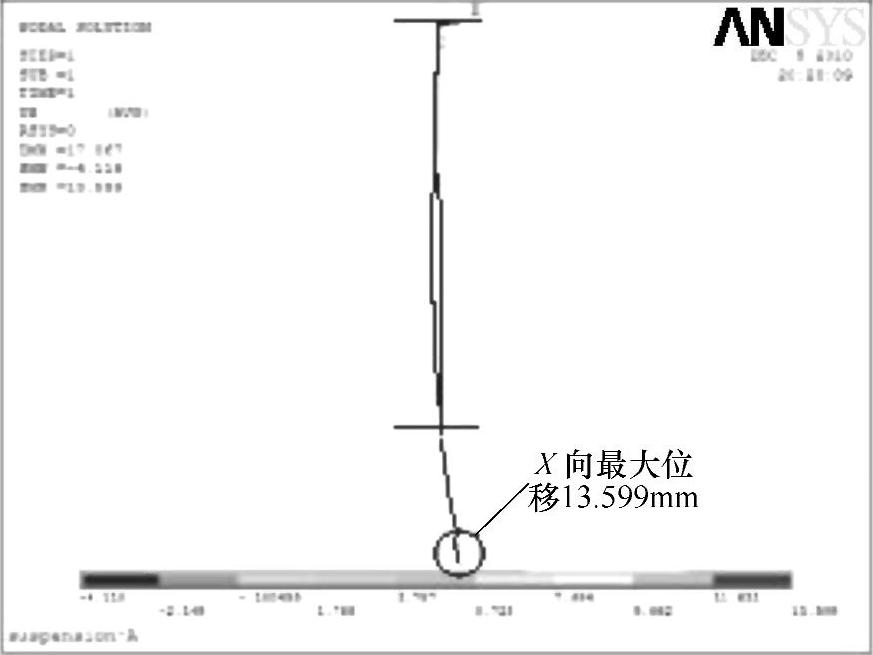
图3-16 +X向水平力作用下X向位移
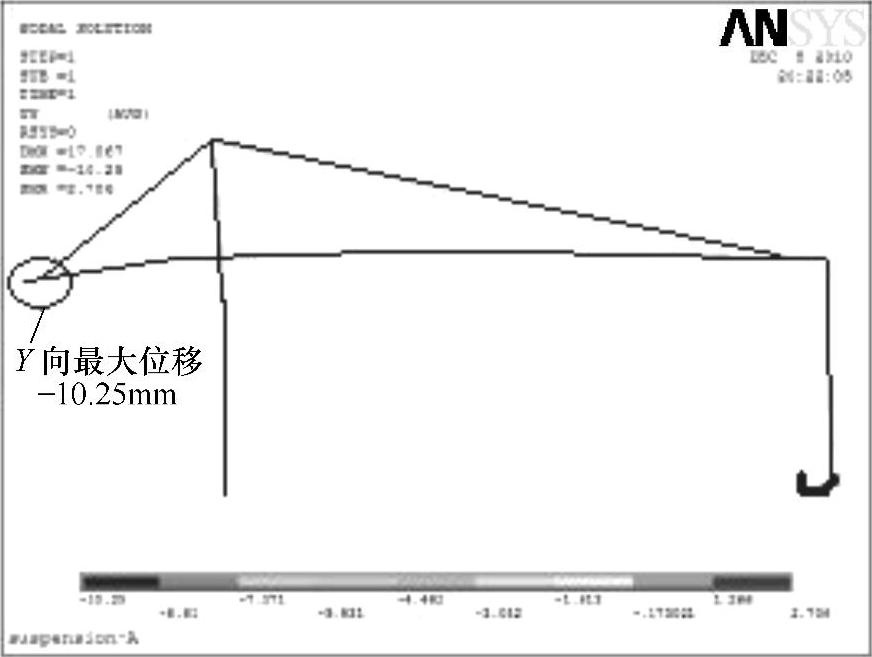
图3-17 +X向水平力作用下Y向位移
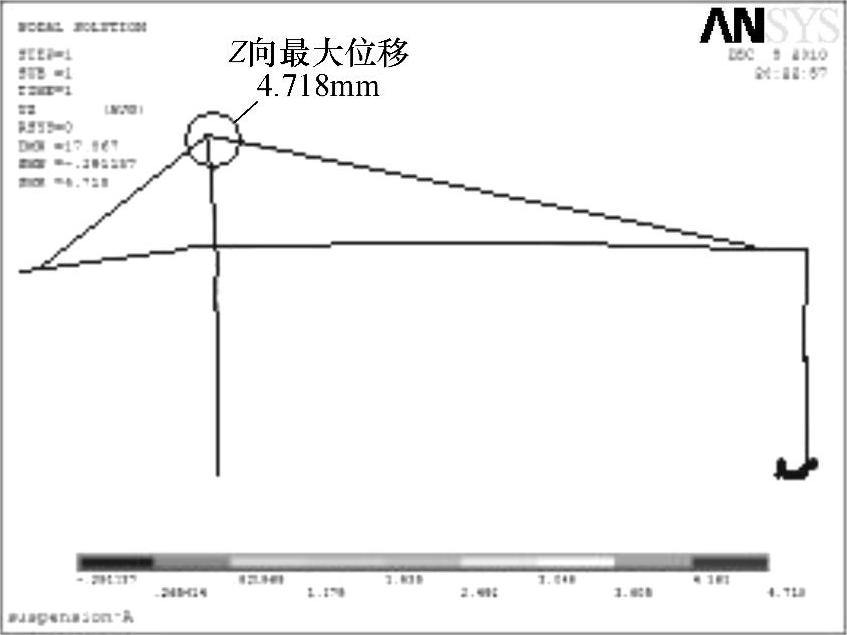
图3-18 +X向水平力作用下Z向位移
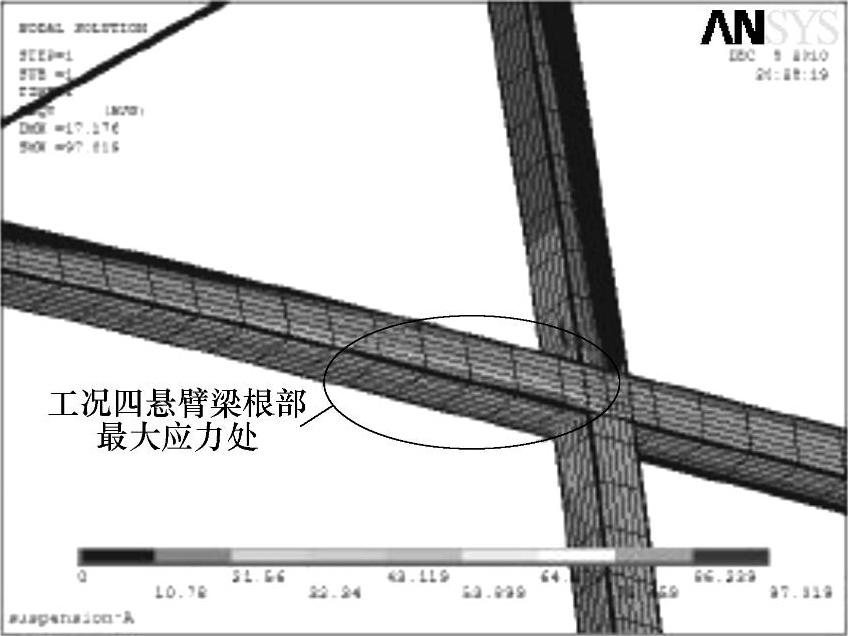
图3-19 +X向水平力作用下应力图
由于施工平台整机结构在X方向是对称的,在X的正负方向的载荷作用对结构产生的影响基本相同,因此本文只对+X方向水平载荷作用下的工况进行求解。
通过对上述四种工况的有限元静力学分析,可以确定结构的最大位移及最大应力出现的位置以及数值大小,其分析结果见表3-1:
从表3-1的各工况计算结果可以看出:当悬吊平台上所承载的载荷由额定载荷变化到125%额定载荷再到额定载荷偏置的过程中,最大位移出现在悬挂机构悬臂梁最前端吊点处,沿-Y向位移值由10.25mm到14.762mm逐渐增大,说明承载重量的增大直接导致悬挂机构悬臂段的-Y向位移的增大;同时,最大应力主要出现在悬臂段的根部下侧,各工况对应的最大应力出现位置已在图中做出标记,当额定载荷偏置时最大应力达到了72.057MPa,查询相关手册标准可知悬挂机构结构的许用应力为117.5MPa,在许用范围内。工况四主要分析了悬吊平台在承受不同方向风载荷时悬挂机构强度、刚度的情况。由数据结果可以看出,当悬吊平台承受Z向水平载荷时,最大位移及应力情况与单独承载起升载荷作用时较为接近,说明Z向水平力对悬挂机构的强度、刚度没有产生过大影响。当悬吊平台承受X方向水平载荷时,虽然X方向的载荷只有939.5N,比额定载荷作用下的起升载荷小很多,但是X方向产生的位移已经超过了单独承载起升载荷所产生的位移,最大应力达到97.019MPa,是起升载荷作用产生位移的2倍左右。这主要是因为:悬挂机构在Y方向上受到具有一定预紧力的张紧钢丝绳的作用,使得悬挂机构悬臂梁刚度得到很大程度的加强,可以承受较大的起升载荷作用。而在水平X方向上,并没有类似的张紧装置,悬臂梁只能靠自身的强度、刚度来抵抗外载荷的作用。在X方向上,当钢丝绳不同倾角产生的水平力对结构会产生不同的影响,随着倾角的增大,水平力也随着增大(表3-2),悬挂机构在X方向产生的位移也随之增大,悬臂梁根部的应力甚至会超过材料本身的许用应力值(117.5MPa),这使得结构的安全性、可靠性降低,有可能导致安全事故的发生。在实际施工过程中,一定要杜绝人为斜拉悬吊平台进行施工作业,分析证明,当斜拉倾角大于6°时,人为导致的水平载荷将大于风载荷,将会产生更大的水平载荷,使悬挂机构悬臂梁最大应力值将达到极限值,易导致危险事故的发生。
表3-1 四种工况静力学分析结果
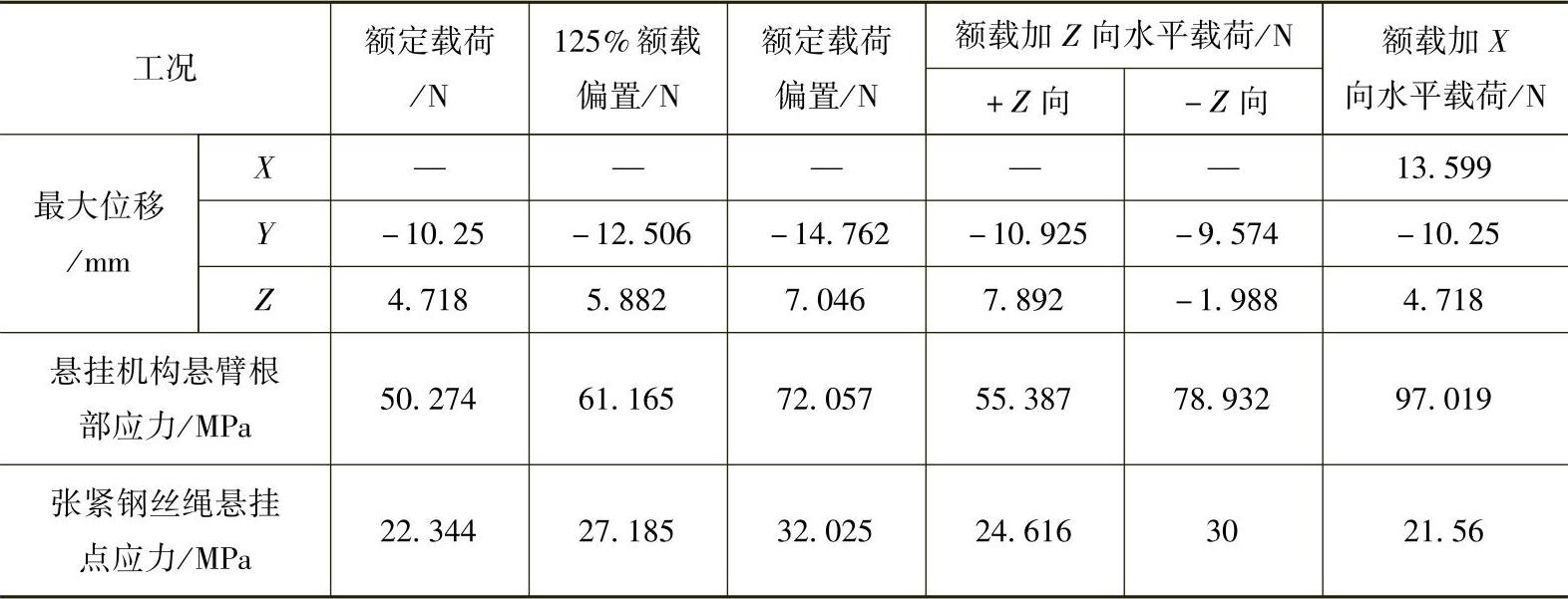
表3-2 X向不同的钢丝绳倾角产生的水平力计算结果
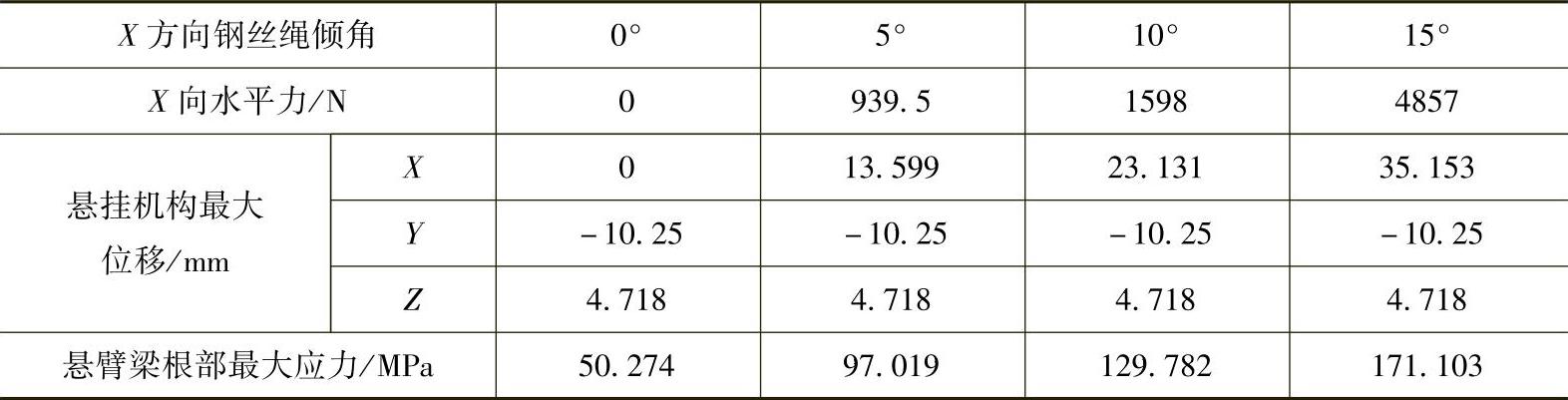
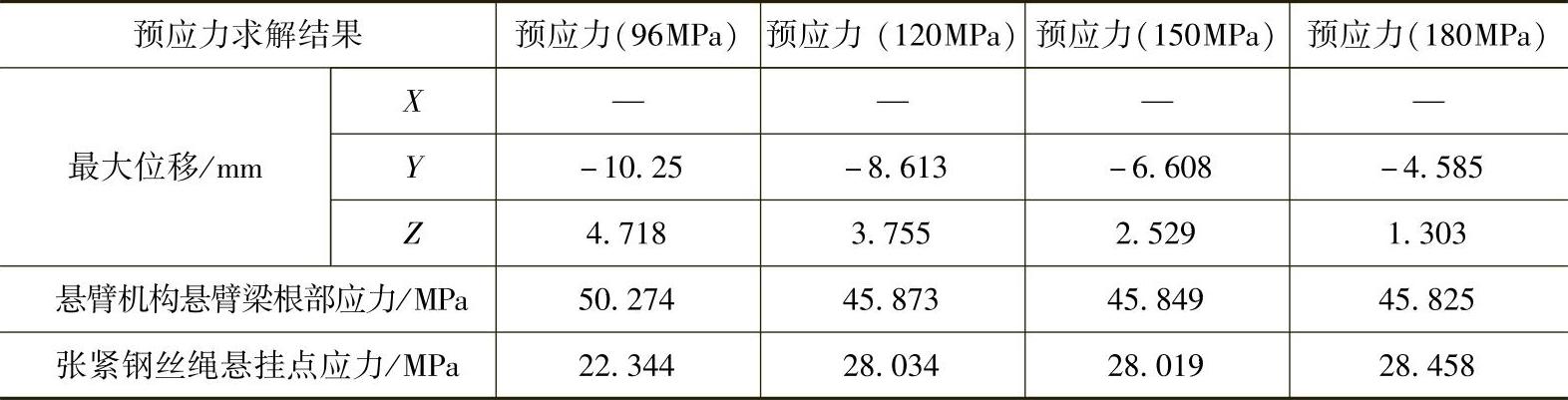
表3-3列出了工况一载荷下张紧钢丝绳在不同预应力条件下结构的位移、应力变化情况。由数据可以看出:随着张紧钢丝绳上预应力的增大,悬挂机构Y向及Z向最大位移随之减小,说明预应力使悬挂机构悬臂梁的刚度增大,可以更好地抵抗Y向起升载荷的作用。同时悬臂梁根部应力也有所减小,但是最大应力出现的位置从悬臂根部向端部转移,如图3-20~图3-23所示,主要是由于悬臂梁的刚度随着张紧力的增加得到了加强,使应力向悬吊点处转移。
表3-3 工况一载荷下张紧钢丝绳预应力下结果
本节对静力学有限元分析的理论进行了简要概述,利用有限元法对高空作业施工装备中平台的几种常见工况下结构的强度、刚度进行有限元静力学分析。主要结论如下:
1)得到了主要承载构件——悬挂机构的危险工况下结构的位移及应力情况,获得的位移及应力云图中悬挂机构承载后的变形与实际情况基本一致,说明利用有限元法建立施工平台模型是正确的,这为后面的动力学分析做了准备。
2)将四种工况下的数据进行了对比分析,前三种工况属于施工平台工作的常规承载工况,位移及应力值都在许用范围内,应力最大处主要集中在悬挂机构悬臂根部,在设计过程中应该进一步采取措施加强该位置的强度和刚度。
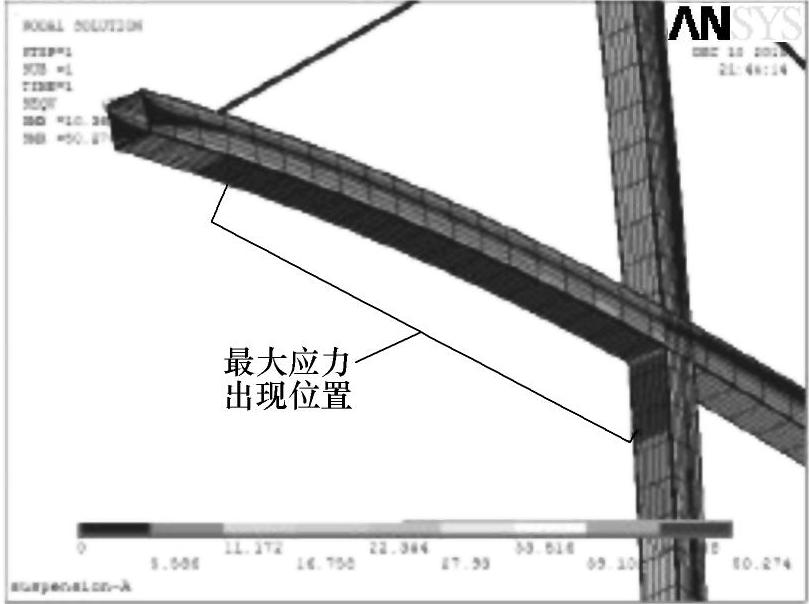
图3-20 96MPa预应力最大应力位置
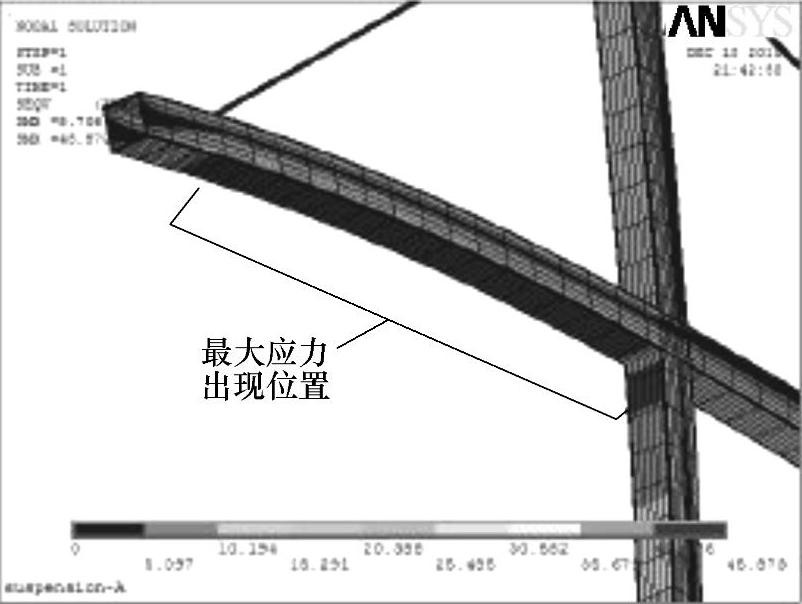
图3-21 120MPa预应力最大应力位置
3)第四种工况属于非工作载荷作用、风载及人为因素造成的悬吊平台偏离正常位置而产生的水平载荷虽然比起升载荷小很多,但对悬挂机构产生的影响却很大,在一定条件下完全有可能超过起升载荷对结构产生的影响,易引发安全事故。因此,在进行更大载荷产品开发设计时,特别是对悬挂机构的设计过程中一定要充分考虑风载荷及人为因素等非工作载荷对整机结构的影响,增加其横向承载能力及稳定性。在安装使用过程中,应该尽量避免人为斜拉悬吊平台进行施工作业,否则过大的水平载荷可能导致结构破坏。
4)对悬挂机构张紧钢丝绳施加一定的预应力,使悬臂梁刚度得到加强,可以更好的抵抗起升载荷。但是过大的预应力在突然卸载时会对系统的性能有一定的影响,所以要将预应力值控制在一定范围内,并不是越大越好。
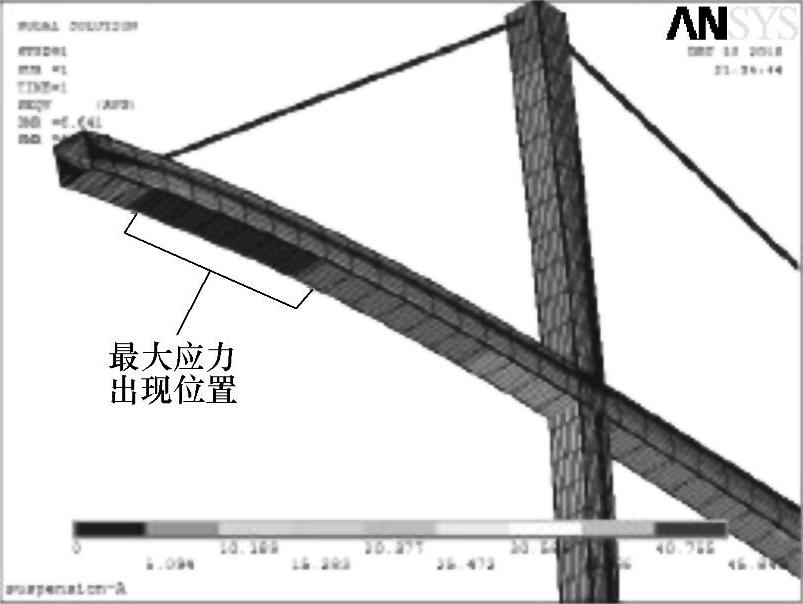
图3-22 150MPa预应力最大应力位置
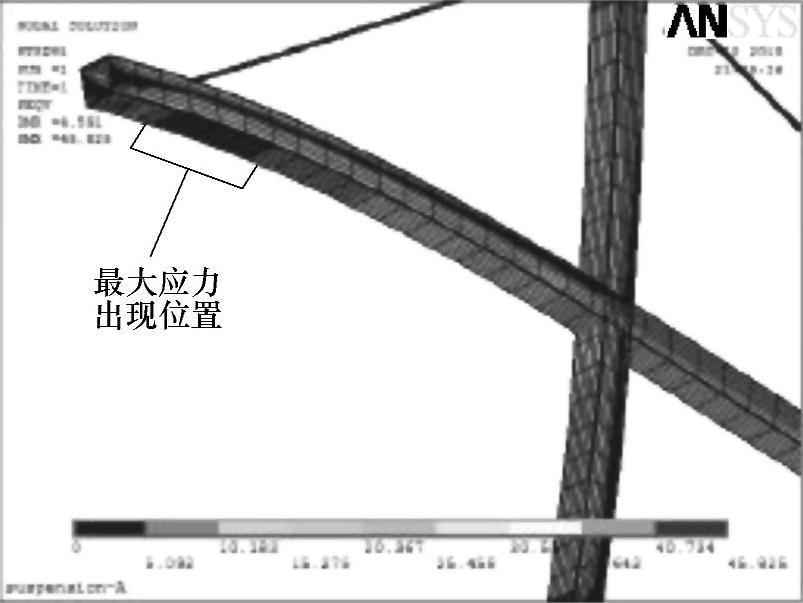
图3-23 180MPa预应力最大应力位置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




