1)新建公制常规模型,绘制一个立方体拉伸形状,长×宽=1000mm×1000mm,添加长、宽参数为“B”的实例参数,如图13-36所示。切换到前立面视图中,在参照标高上方在水平方向上绘制一个参照平面,执行“对齐尺寸标注”命令,标出其与参照标高重合的参照平面之间的距离,添加实例参数“H”,之后将构件的上表面锁定到该参照平面(即创建对齐约束),在“属性”栏中勾选“基于工作平面”,不勾选“总是垂直”,切换到三维视图,如图13-37所示。完成之后保存,命名为“族1”。
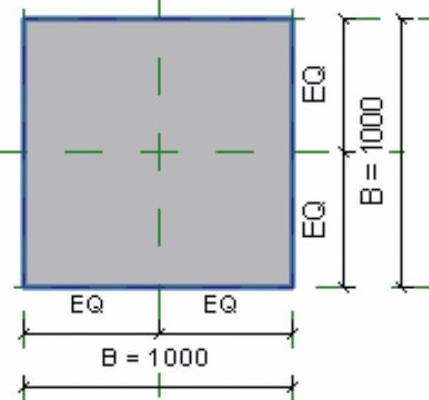
图13-36

图13-37
2)再次新建一个公制常规模型,保存并命名为“塔吊”。将族1载入其中,选择“放置在工作平面”放置在中心位置,如图13-38和图13-39所示。

图13-38
图13-39
3)放置后打开前立面视图,选中族1,执行“翻转工作平面”命令,将族1翻转到参照标高下方,如图13-40和图13-41所示。
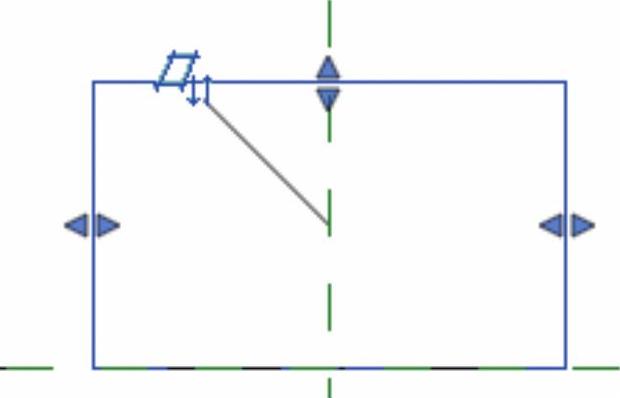
图13-40
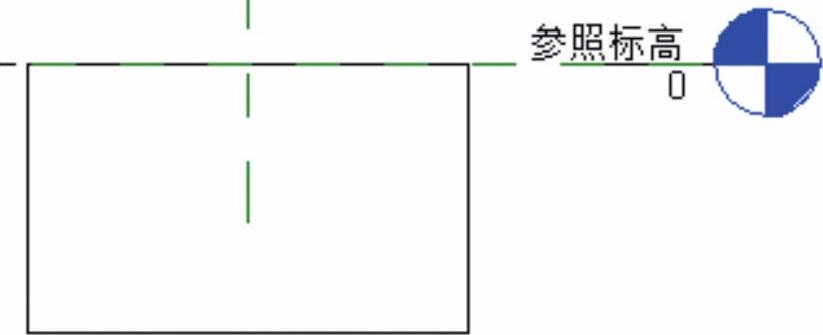
图13-41
选中构件,找到参数“H”,关联族参数,添加新的参数“基础高度”,将“B”关联为“B1”,如图13-42所示。完成后修改“基础高度”和“B1”,观察构件变动情况。
4)切换到参照标高平面视图,执行“放置构件”命令,再次放置一个新的“族1”,同样放置到中心,如图13-43所示。选中该构件,关联族参数,将“B”关联为“B2”,找到参数“H”并关联新的族参数“底座高度”,如图13-44所示。
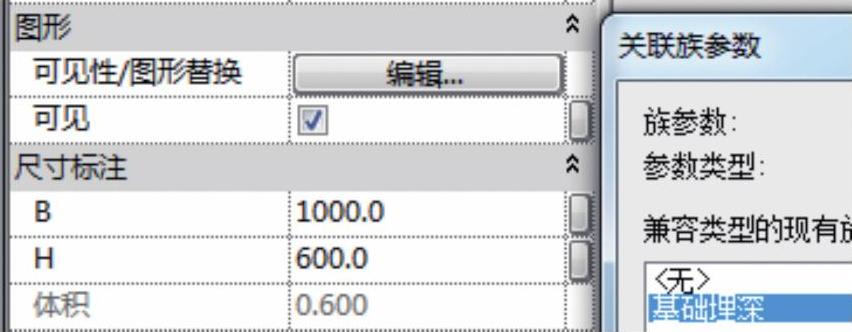
图13-42
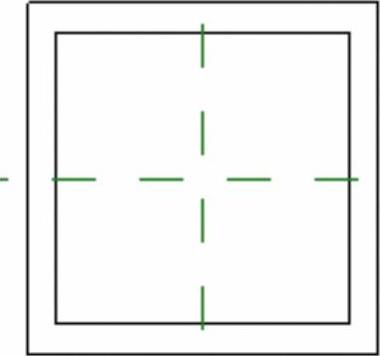
图13-43
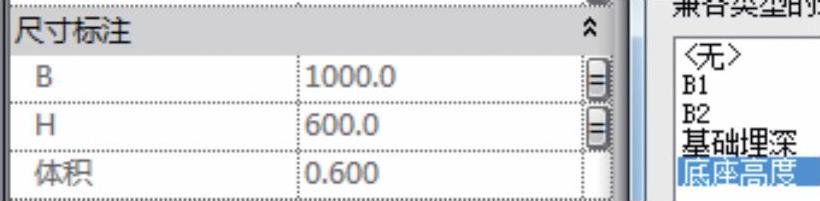
图13-44
5)切换到前立面视图,选中刚刚放置的底座,此时在“属性”栏中,“工作平面”为“族1”,如图13-45所示,因此需要重新更改工作平面。确保底座在选中的状态下,执行“编辑工作平面”命令,打开“工作平面”对话框,在“名称”下选择“参照标高”,如图13-46所示,单击“确定”按钮退出对话框。
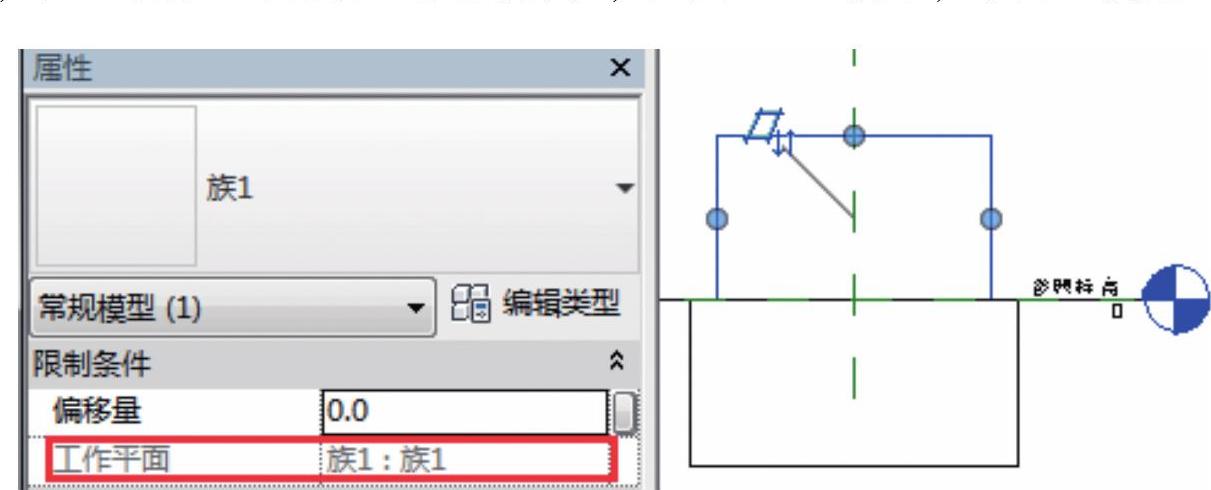
图13-45
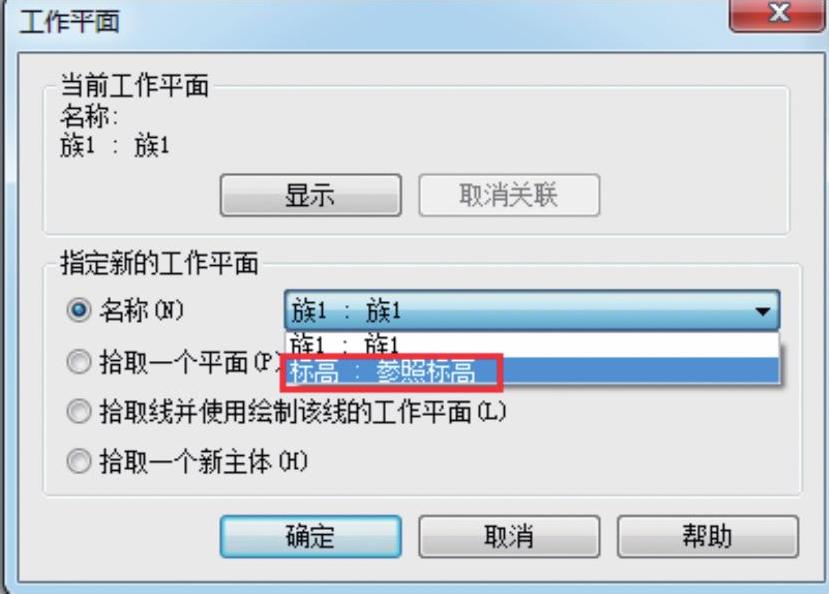
图13-46
6)在前立面视图中,在参照标高上方绘制一条水平参照平面,并对其与参照标高重合的参照平面进行注释,添加参数为“底座高度”,如图13-47所示。打开“族类型”对话框,测试参数。
7)切换到参照标高平面视图,执行“放置构件”命令,再次放置一个新的“族1”,同样放置到中心,如图13-48所示。选中该构件,关联族参数,将“B”关联为“B3”,找到参数“H”并关联新的族参数“标准节高”,如图13-49所示。
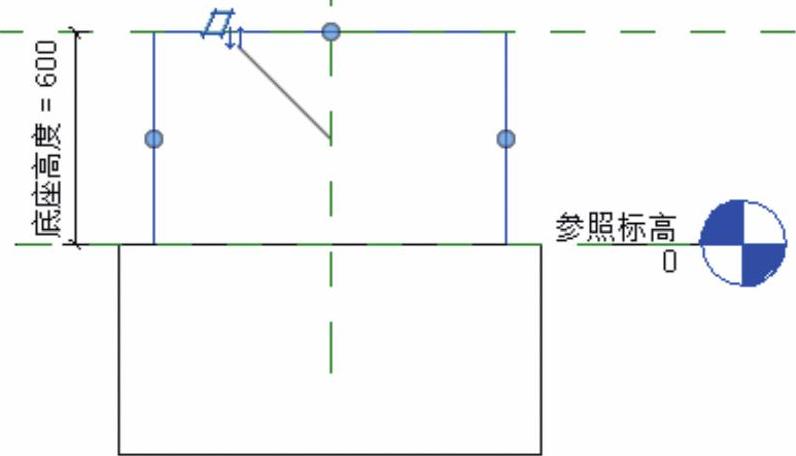
图13-47
图13-48
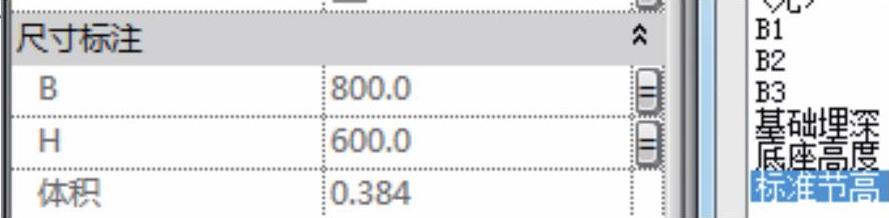
图13-49
8)切换到前立面视图,执行“对齐”命令,将刚刚放置的族1即标准节的下边锁定到参照平面上,如图13-50所示。
9)在前立面视图中,在标准节上方再绘制一个水平参照平面,并进行注释添加参数为“标准节高”,如图13-51所示。选中标准节,向上阵列,选择“成组并关联”并移动到“第二个”的方式,沿构件底向上至顶作为距离阵列,输入适当的阵列个数,完成后选中阵列成组线在选项栏上添加参数“N”,如图13-52所示。
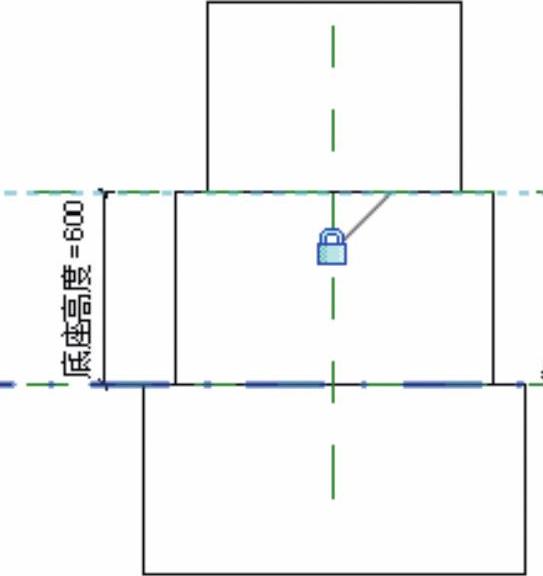
图13-50
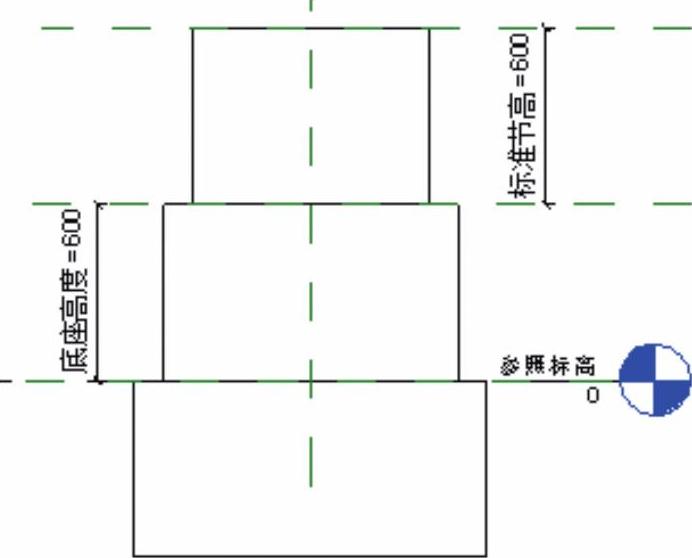
图13-51
10)选中倒数第二个标准节,编辑组,将下面的边锁到参照平面上,如图13-53所示。完成后,打开“族类型”对话框测试参数,如图13-54所示。
11)在参照标高平面视图,执行“放置构件”命令,再次放置族1,将其作为顶部的“爬架”,如图13-55所示。此时切换到前立面视图,如图13-56所示。选中爬架,找到高度参数,关联族参数,添加新的参数,命名为“爬架自高”,将“B”关联为“B4”,如图13-57所示。
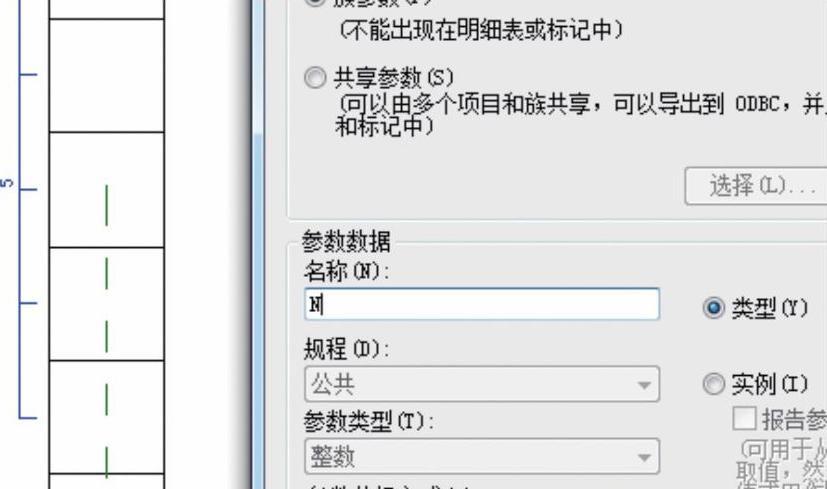
图13-52

图13-53
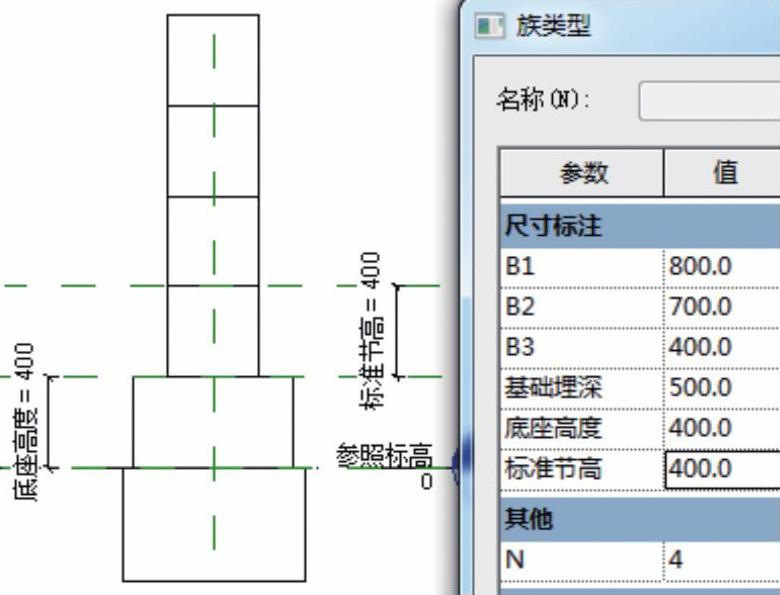
图13-54
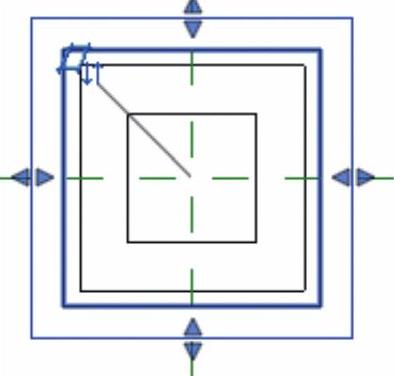
图13-55
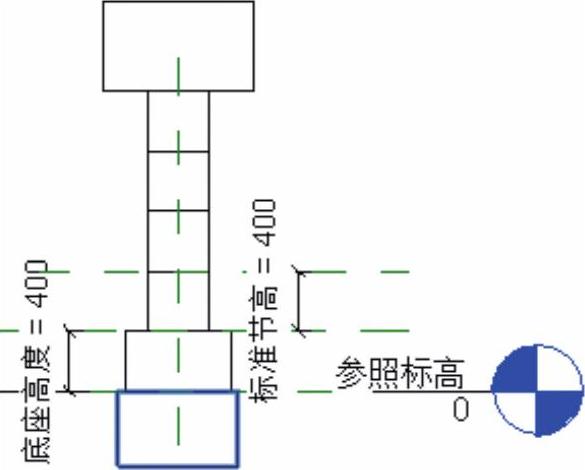
图13-56
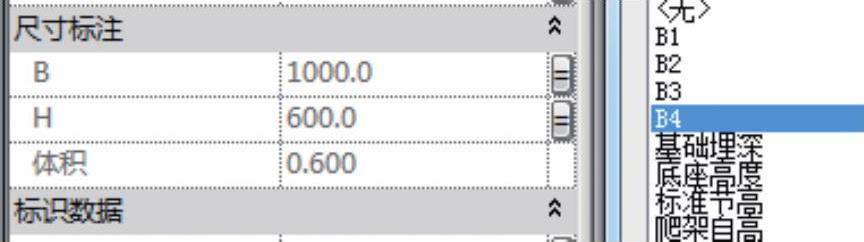
图13-57
12)在爬架下方绘制一条水平参照平面,对其将与参照标高重合的参照平面进行注释,并添加参数“L”,如图13-58所示。打开“族类型”对话框,添加公式L=“底座高度+标准节高∗N”。选中爬架,将爬架的工作平面设置为爬架下方的参照平面,如图13-59所示,测试参数。
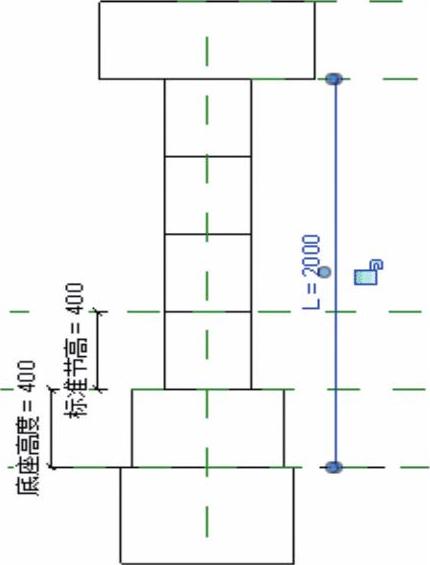
图13-58
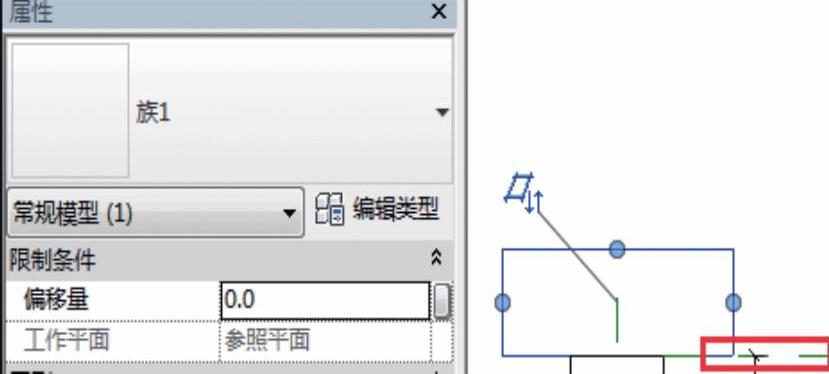
图13-59
13)新建公制常规模型,现在要做的是一个支座(一个简单的融合构件),下底边长2500mm,上底边长1800mm,都是正方形轮廓,如图13-60所示。融合完成后在“属性”栏中找到“第二端点”关联族参数,命名为“下支座高”,如图13-61所示。完成后保存文件并命名为“下支座”。现在将下支座载入到塔吊中,放置在中心,找到“下支座高”参数,关联族参数,添加新的参数,命名为“下支座高”。“属性”栏中的“偏移量”也同样关联族参数,命名为“下支座底高”,如图13-62所示。打开“族类型”对话框,在“下支座底高”公式中输入“L+爬架自高”。切换到三维视图中观察构件是否处于正确位置,如图13-63所示。
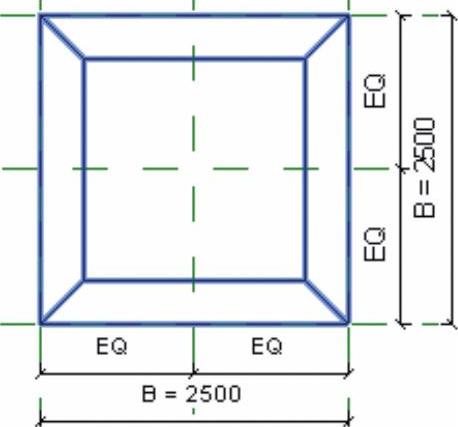
图13-60
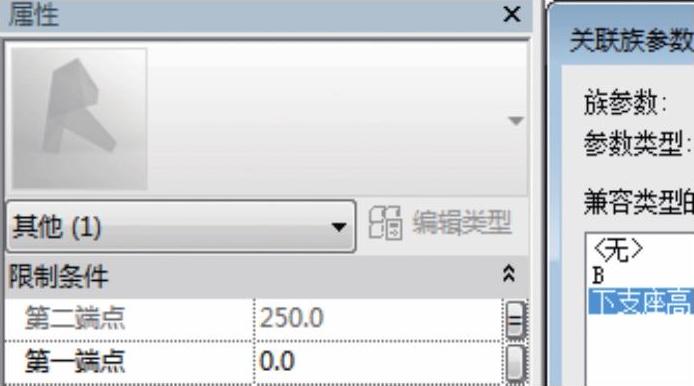
图13-61
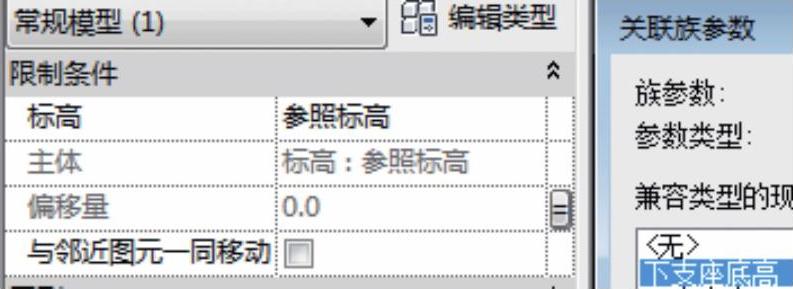
图13-62

图13-63
14)接下来就开始着手于旋转部分。在塔吊族中,进入前立面视图,在下支座的顶面高度附近绘制一条参照线,这是构件旋转的承载体。切换到“参照标高”平面视图,可以临时隐藏其他构件,在参照标高视图中绘制一条倾斜的参照线(稍带倾斜为的是方便之后的操作),再选择参照线的端点,将参照线左下角的端点确定到这两个参照平面的交点,如图13-64所示。因为这两个参照平面相交,所以就自然而然地将参照线固定在了交点处,两次对齐之后需要锁定(即创建对齐约束)。
完成之后执行“角度尺寸标注”命令进行命名,标注参照线与参照平面中心(前/后)之间的角度,选择角度标注,添加参数“旋转角度”,如图13-65所示。打开“族类型”对话框,修改角度参数值,观察参照线的旋转变化情况。
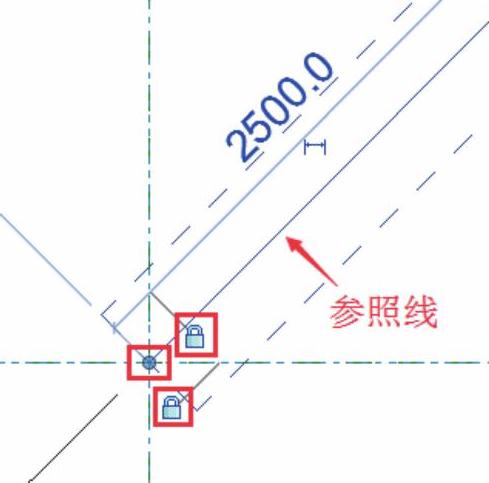
图13-64
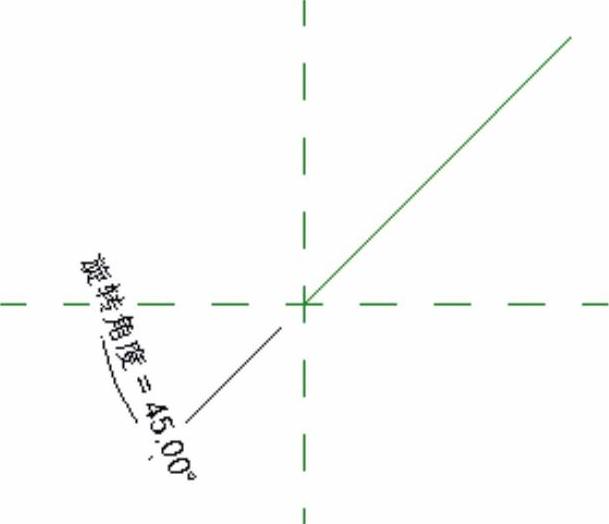
图13-65
完成之后选择该参照线,单击“编辑工作平面”,然后选择“拾取一个平面”,这里选择“下支座”,如图13-66和图13-67所示。那么该参照线也就会随构件的高度变化而变化。打开“族类型”对话框,再次修改角度参数,观察是否工作正常,完成后保存,如图13-68所示。
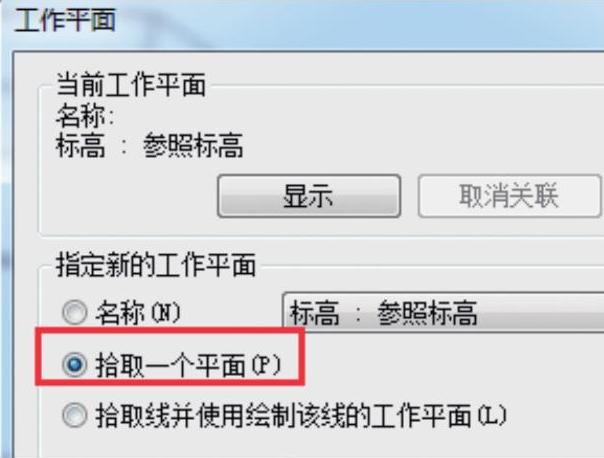
图13-66
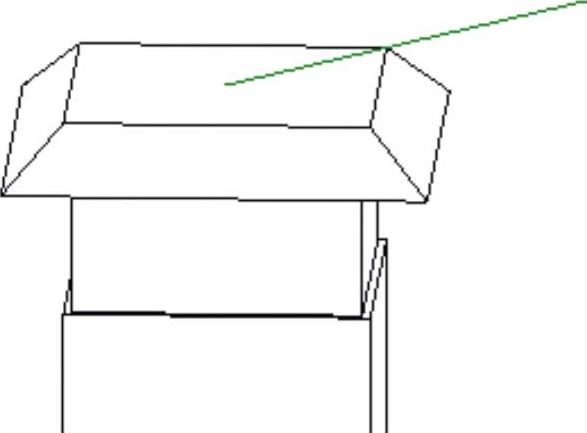
图13-67
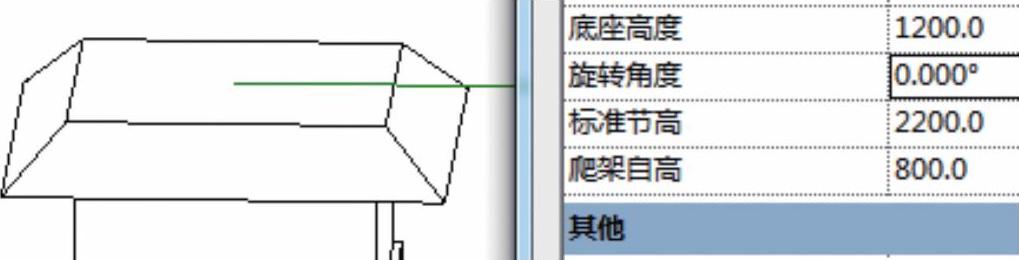
图13-68
15)接下来制作旋转构件。新建基于面的公制常规模型,在参照标高视图中,绘制融合构件,为下底小、上顶大的形状。具体数值是:底部正方形边长=1800mm,顶部正方形边长=2500mm,如图13-69和图13-70所示。完成后在“属性”栏中找到第二端点,关联族参数,添加参数为“上支座高”,并修改参数值为“800mm”,完成后保存,命名为“上支座”。
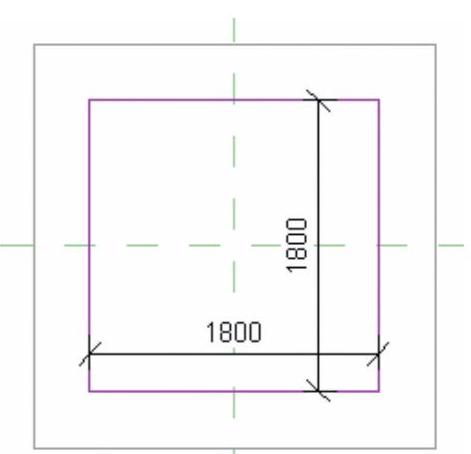
图13-69(www.daowen.com)
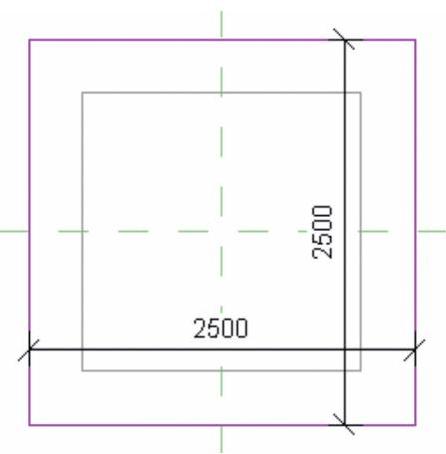
图13-70
16)将“上支座”族载入到“塔吊”文件中。基于面的构件在放置时有两种方式:“放置在面上”和“放置在工作平面上”。这里选择“放置在工作平面上”。放置构件时切换到参照标高视图为宜,使中心对中心。完成后同样需要调整其高度,回到三维视图,选中构件,在“修改丨常规模型”选项卡中单击“编辑工作平面”,在弹出的“工作平面”对话框中选择“拾取一个平面”,如图13-71所示,此时选择参照线自身的水平平面(图13-72),构件随之移动至指定位置,此时构件的主体应该就是参照线了(在“属性”栏中的“限制条件”处可以看到)。打开“族类型”对话框,修改角度参数,观察构件是否跟随参照线旋转,完成后保存。
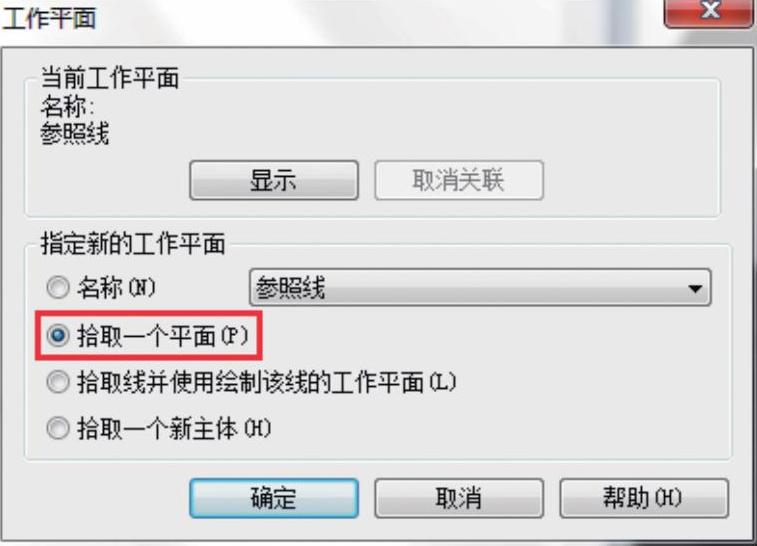
图13-71
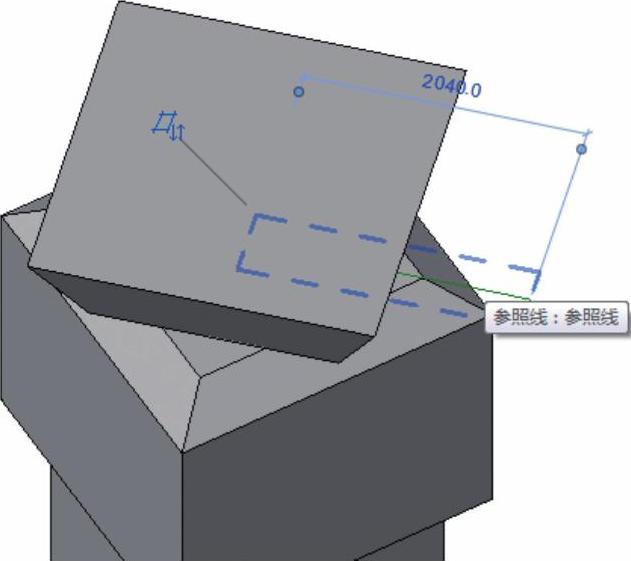
图13-72
17)继续回到“上支座”族文件。鉴于其在塔吊环境下经受住了参数的考验,之后的形式便可以基于该文件继续制作起重臂、臂架拉绳和平衡臂拉绳、塔吊尖等。这里由于重点为参数控制,所以对于形体上的要求暂定为一个大样,之后才会进行细化。首先在上支座的顶面绘制一个较大的矩形拉伸体。值得注意的是:它的宽和上支座的顶面边长一样为2500mm、长4000mm、高1400mm,如图13-73和图13-74所示,之后在其上表面绘制一个较小的矩形拉伸体,宽1700mm、长1400mm、高2100mm,如图13-75和图13-76所示。那么继续向上绘制的就是塔吊尖了,具体过程如图13-77和图13-78所示。
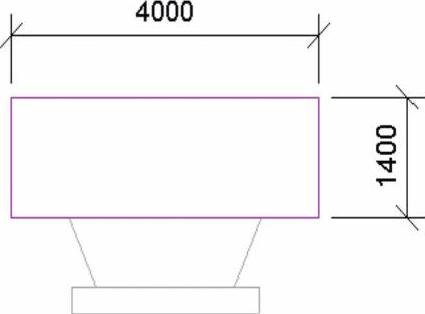
图13-73
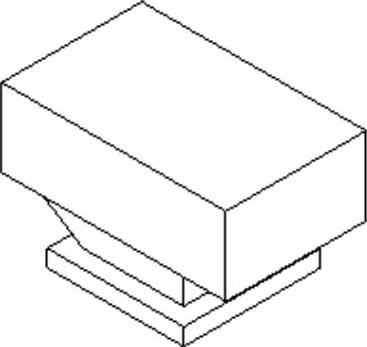
图13-74
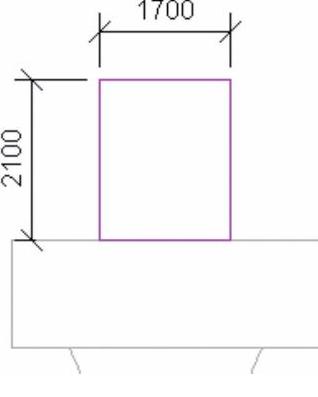
图13-75
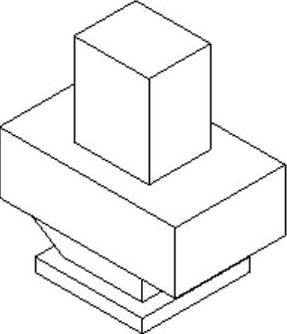
图13-76
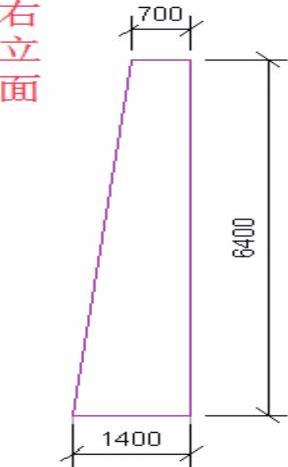
图13-77
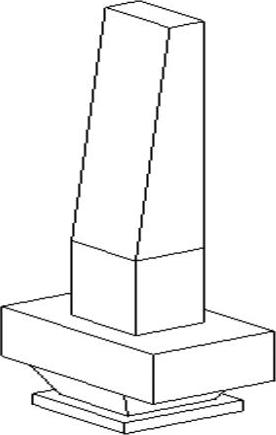
图13-78
18)接下来安装起重臂和平衡臂。新建基于面的公制常规模型,进入右立面,绘制如图13-79所示的三角形轮廓。完成后回到参照标高视图,在右侧绘制一个竖直的参照平面,执行“对齐尺寸标注”命令标注出其与“中心(左右)”参照平面的距离,如图13-80所示,并添加参数为“起重臂长度”,将之前绘制的三角形拉伸的左右两个面分别对齐约束(锁定)到这两个参照平面上,保存并命名“起重臂”。
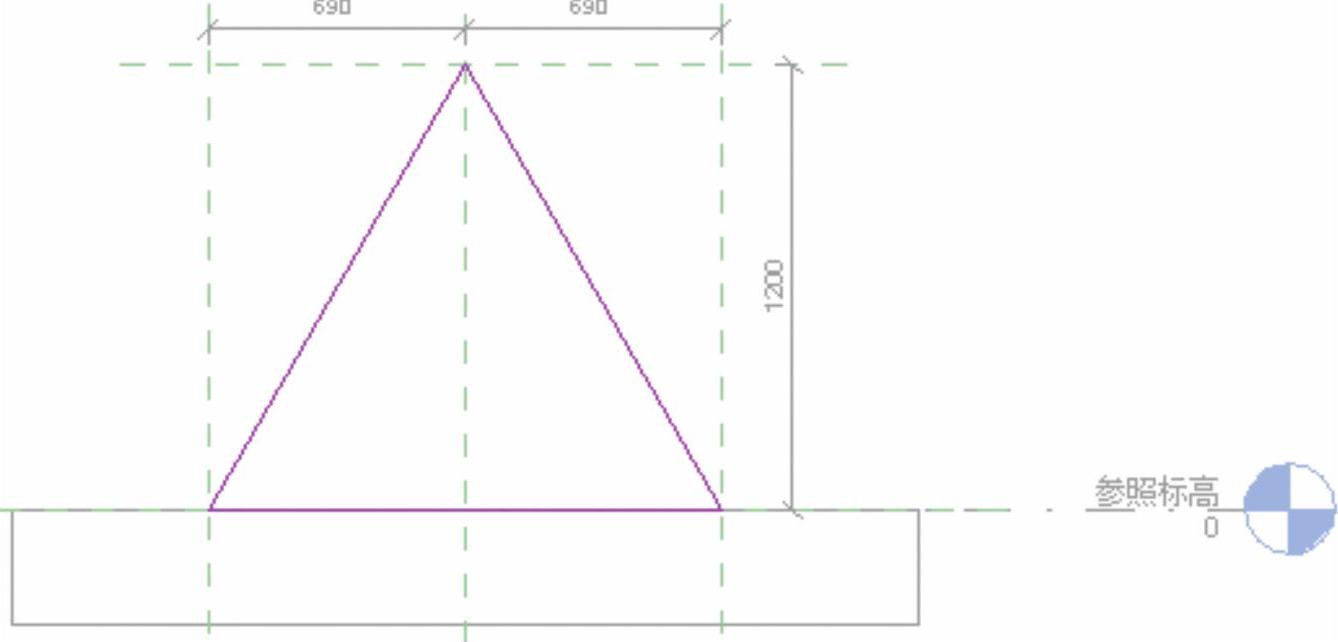
图13-79
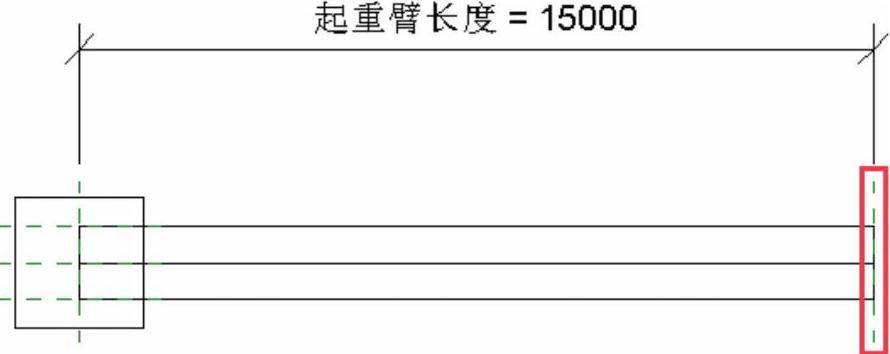
图13-80
19)新建公制常规模型,现在要做一个起重臂的末端,同样在右立面绘制一个三角形草图轮廓,尺寸与起重臂的一样,接下来绘制几个参照平面,用于确定形状图元,在前立面绘制如图13-81所示的参照平面。
20)将拉伸体的左右两个面分别对齐约束到“中心(左右)”参照平面与距离2600mm的参照平面,如图13-82所示。完成之后再绘制一个空心拉伸体来进行剪切(图13-83),确保空心形状宽度足够覆盖拉伸体。然后单击“修改”选项卡中的剪切,分别选择两个拉伸体,即可完成剪切。
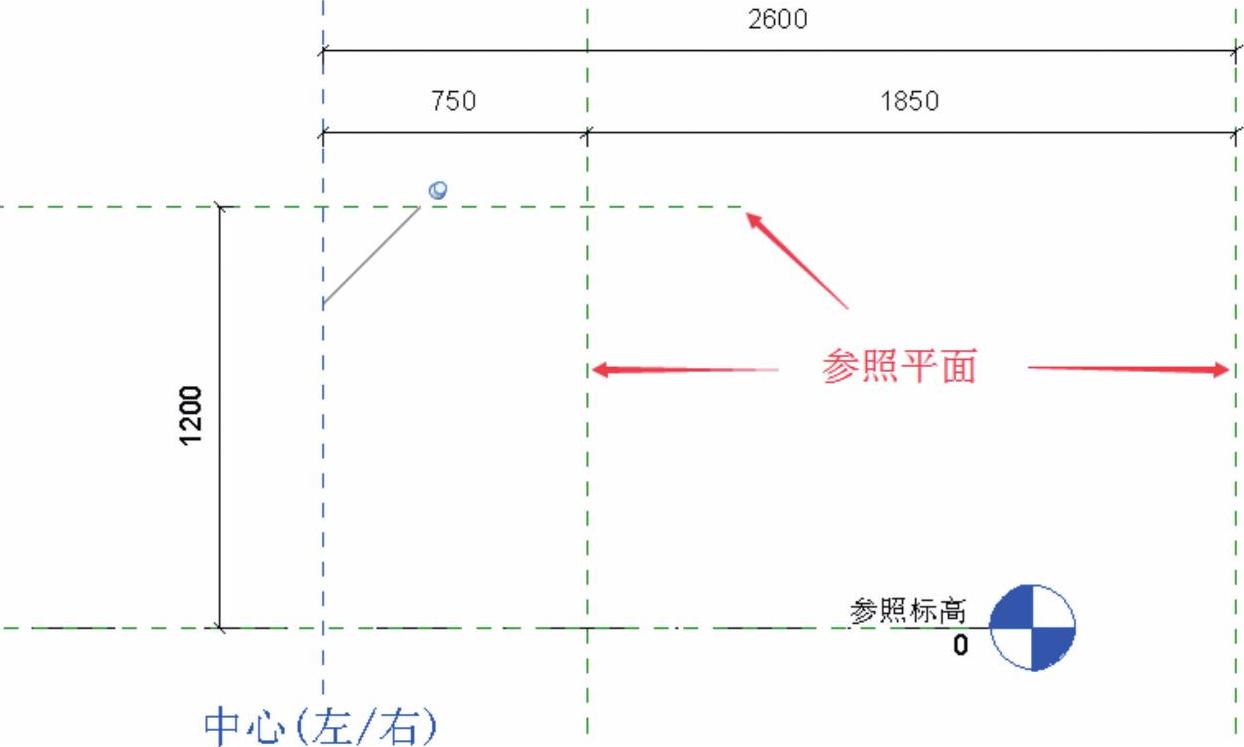
图13-81
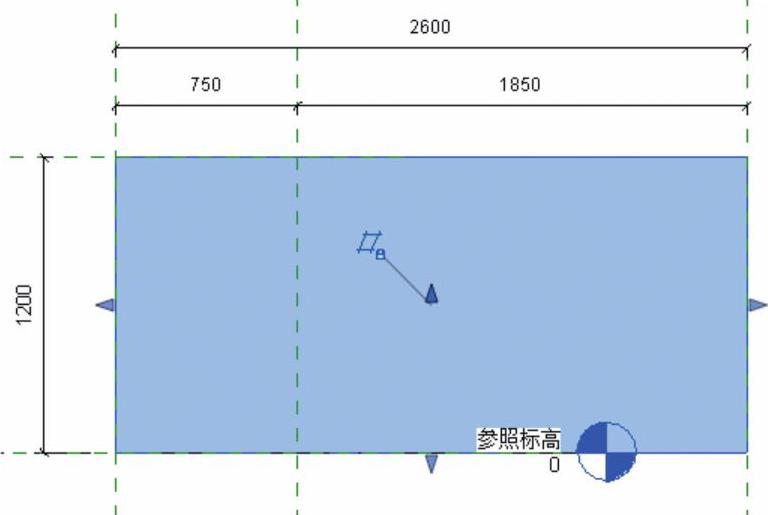
图13-82
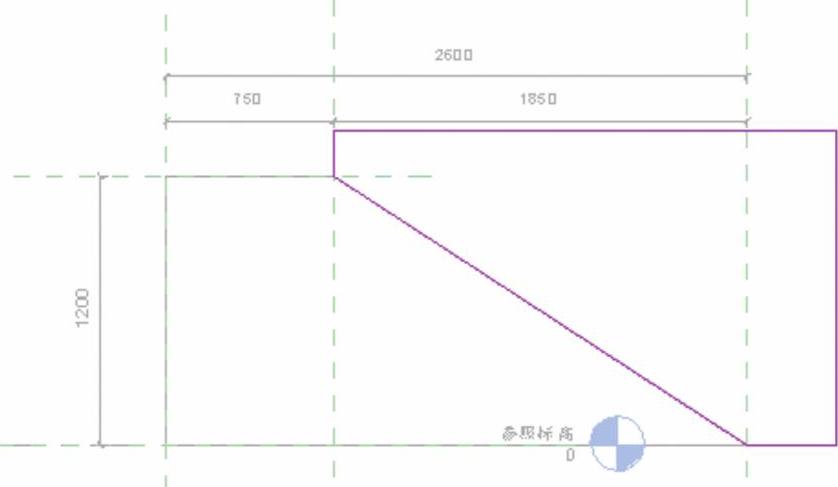
图13-83
21)现将20)中完成的族载入到起重臂中,在参照标高视图中,末端构件的X轴对齐参照平面“中心(前/后)”并锁定,接着再对齐约束到起重臂的末端,将两者拼接(锁定到同一个参照平面),如图13-84所示。完成后尝试修改起重臂长度参数,观察构件变化情况。
22)回到起重臂族中,在右立面视图中,绘制参照平面,命名为“起重臂”,如图13-85所示。将起重臂构件载入到上支座。同样是基于面的族,所以同样选择放置方式为“放置在工作平面上”,如图13-86所示,处理步骤和之前一样,最终是要把构件的主体变为“参照平面:起重臂”如图13-87所示。
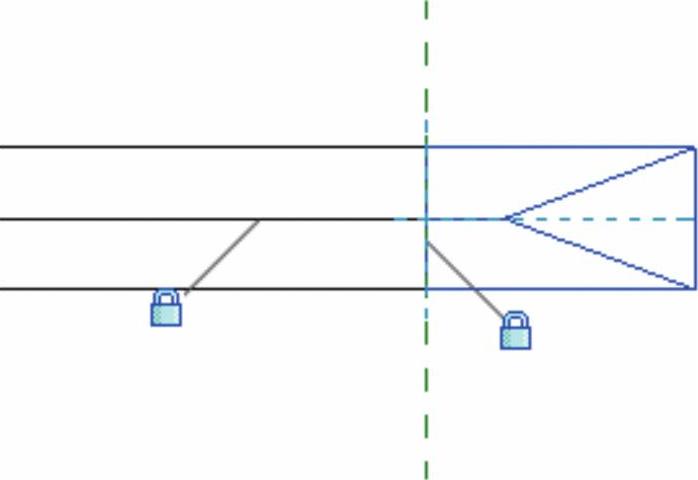
图13-84
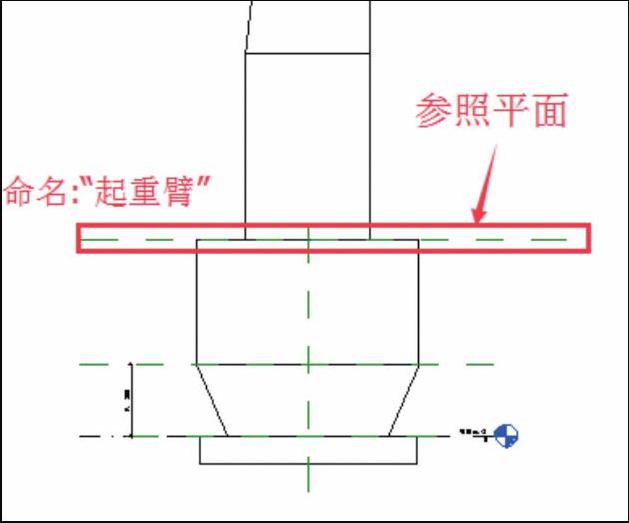
图13-85
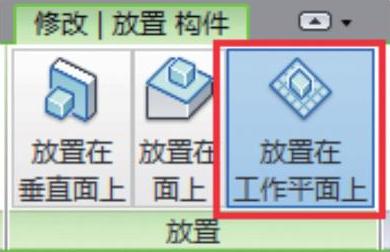
图13-86
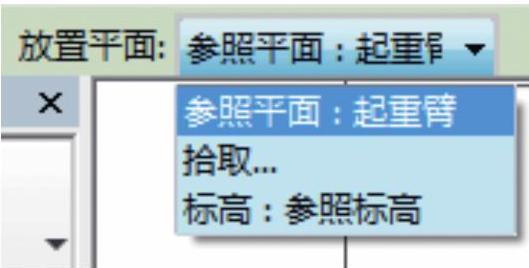
图13-87
23)现在将平衡臂绘制出来。打开右立面视图,绘制一个拉伸体(矩形草图轮廓),与起重臂的位置相同,如图13-88和图13-89所示。
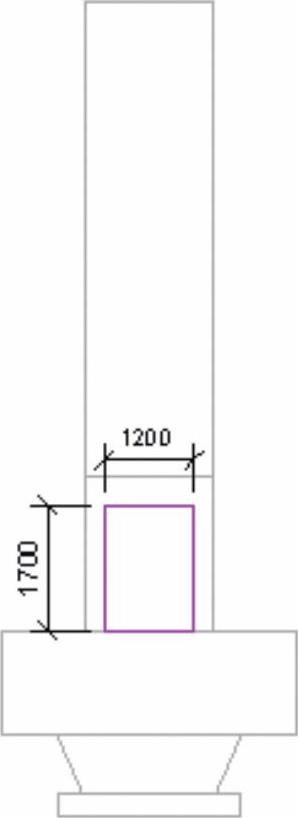
图13-88
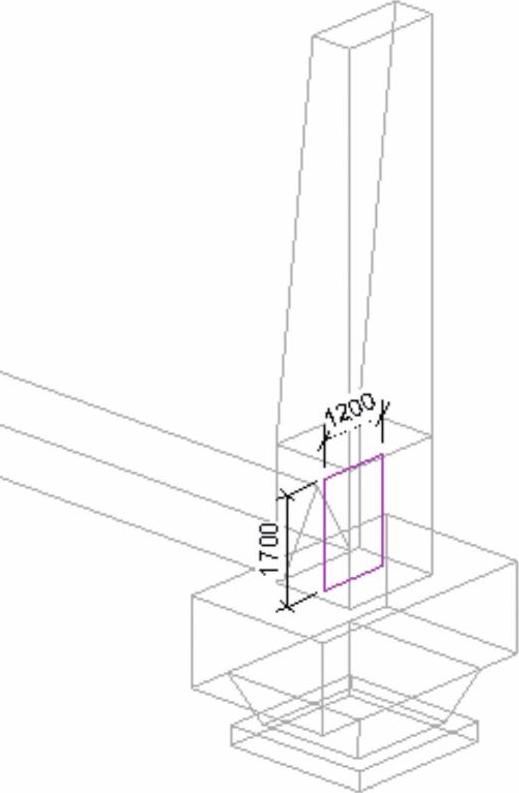
图13-89
完成后为了确定平衡臂的长度,在后立面视图中,在构件的右侧绘制一个竖直方向的参照平面,如图13-90所示,进行尺寸标注,并添加参数“平衡臂长”,将构件的两端对齐约束到这两个参照平面,如图13-91所示。
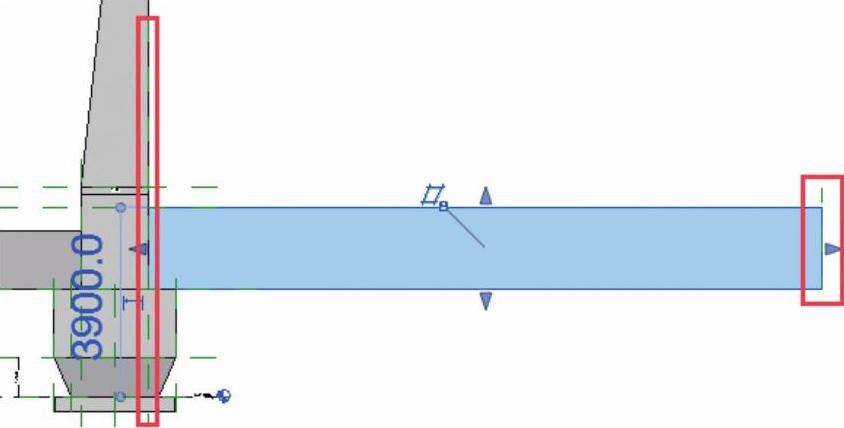
图13-90
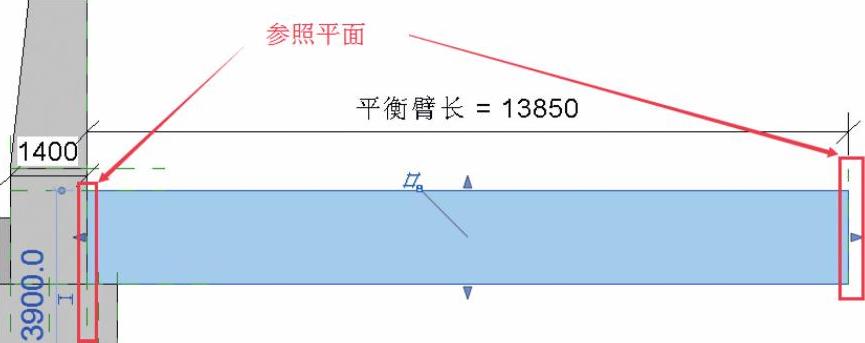
图13-91
24)保存并载入到塔吊中,覆盖原有版本及参数值,再次修改角度参数,观察构件的变化情况是否合理。
25)现在就剩下塔吊的钢丝绳了。新建公制常规模型,在参照标高视图中绘制参照线,使用拾取线命名,拾取“中心(左/右)”向左右各偏移600mm,因为600mm的偏移量正好是平衡臂的宽度。同样的,继续通过拾取线的方式放置参照平面,这次向左拾取“中心(前/后)”参照平面,偏移量设为700mm,以新偏移出来的参照平面为基准来再次向上拾取,偏移量设置为11600mm,如图13-92所示。到右立面视图中,还是利用拾取线命名,向上拾取参照标高,偏移量为1200(该参照平面命名为“1200”)、1700mm(将该参照平面命名为“1700”)、8000mm,如图13-93所示。
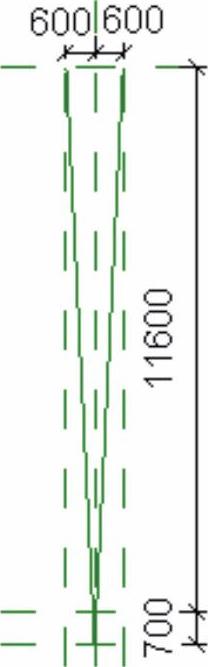
图13-92
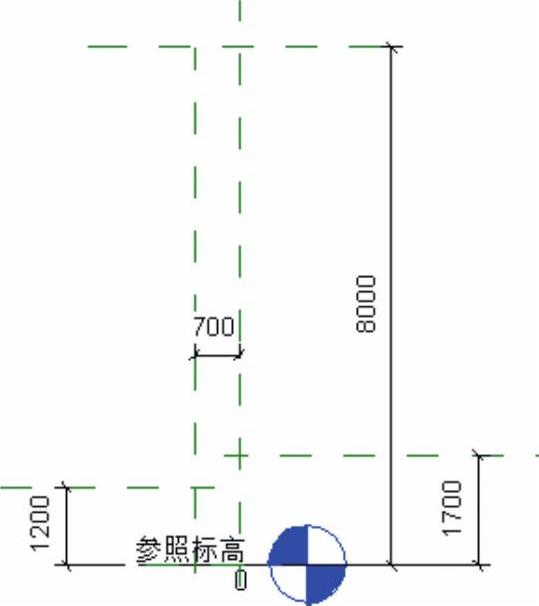
图13-93
26)在参照标高选择如图13-92所示的两条参照线,编辑工作平面,选择之前命名为1700的参照平面,切换回右立面视图,如图13-94所示。以在距离“中心(前/后)”700mm位置的那个参照平面为参照绘制一条竖直的参照线,现在就有了3条参照线,回到三维视图中,将其连接,如图13-95所示。
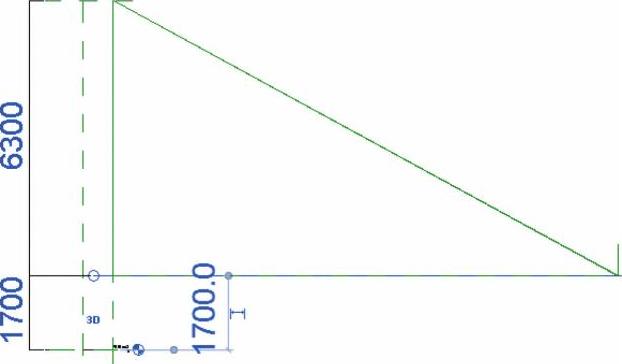
图13-94
图13-95
27)执行“放样”命令,拾取路径,拾取两条倾斜的参照线作为路径,如图13-96示。完成后编辑轮廓,使用圆形草图轮廓对正于工作平面中心,半径取60mm,如图13-97所示。另一条参照线同理操作,完成后如图13-98所示。
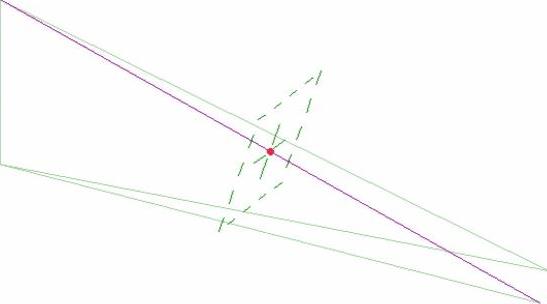
图13-96
图13-97
图13-98
28)起重臂部分的钢丝绳就相对简单了。切换到右立面视图,执行“拾取线”命令来放置参照平面,选取“中心(前/后)”向左偏移两次,两次不同的偏移量得到两个不同距离的参照平面。原来1200mm的参照平面得到了两个不同距离的参照平面,如图13-99所示。
29)执行“放样”命令,拾取路径时选用这两条参照线,编辑轮廓时同样保持一致的圆形半径(60mm),最终效果如图13-100所示。
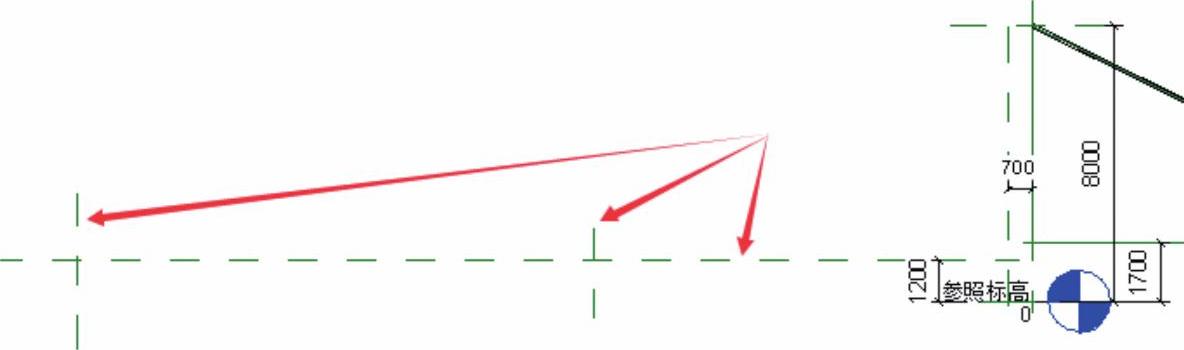
图13-99
图13-100
30)完成之后载入到“上支座”中,中心对中心放置,在“中心(前/后)”和“中心(左/右)”参照平面对齐约束,进入右立面视图,选择钢丝绳,修改偏移量为1000mm即可。载入到塔吊中,打开“族类型”对话框,修改参数,观察构件变化的情况,如图13-101和图13-102所示。

图13-101
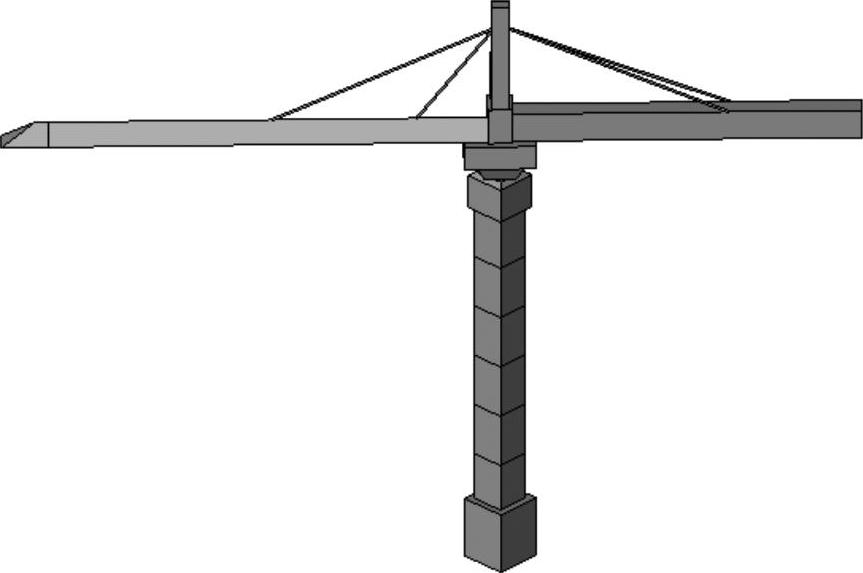
图13-102
本节总结起来,主要有以下几点:
1)本节主要讲解了参数化控制构件的升降与旋转,在控制高度的过程中,可以划分为两个过程:一是简单地添加高度参数并关联到其他环境中;二是构件阵列之后的高度参数处理,即关联参数的时候考虑阵列因素,保持好全体组成员的一致性与连接性。
2)旋转则是通过媒介使构件随之旋转。普通的构件或较复杂的构件遇到一块儿时,构件本身自带的旋转特性几乎不能完全满足要求,因此需要一座“桥梁”——具有旋转特性的参照线,参照线本身自然是没有角度参数的,然而它具有自身的参照平面,因此只要额外赋予一个角度参数即可,其他构件都可以随之变化而不发生冲突。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





