下面我们做一个简单的构件,通过对比来加深对“方向”属性的认识。
1)新建一个族,选择“自适应公制常规模型”样板,放置3个参照点,并转为放置点(自适应)[1],如图4-60所示。
基本思路是:在中间的自适应点上做好关于方向的标记,然后把这个构件放到概念体量环境当中的分割表面上去,观察标记的变化。
选择中间的自适应点,显示出三维控件,如图4-61所示。根据前面的介绍,我们已经知道,东西方向的红色箭头代表全局坐标系的Y轴,南北方向的绿色箭头代表全局坐标系的X轴,向上的蓝色箭头代表全局坐标系的Z轴。
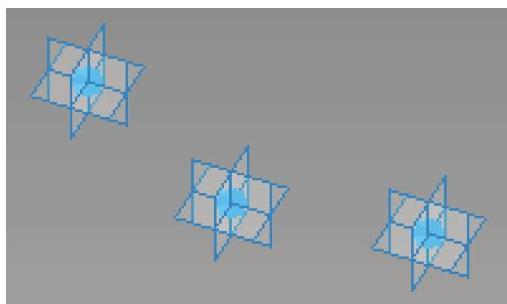
图4-60
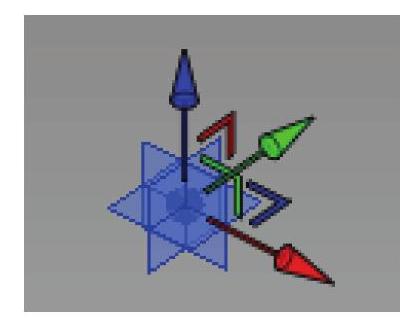
图4-61
2)单击“创建”选项卡“绘制”面板巾的“点图元”,如图4-62所示。切换到“修改放置点”选项卡,这时再单击“工作平面”模块中的“设置”,在绘图区域移动光标靠近中间的自适应点
(图4-63),调整光标的位置,或者按<Tab>键进行切换,使该点携带的水平参照平面高亮显示,单击一次就完成了新工作平面的设置。这时光标会变为带有参照点预览图像的外观,如图4-64所示。移动光标,捕捉到自适应点,自适应点会变为蓝色高亮显示,单击一次,放置一个参照点,如图4-65所示。这个参照点和自适应点的位置是重合的。按<Esc>键两次,结束放置点图元的命令。现在要把放置的参照点从自适应点的位置偏移出一段距离,移动光标靠近自适应点,可以根据光标附近的显示信息和图形来判断,将被选择的图元是什么,对比图4-66和图4-67,当显示为参照点时,单击选中它。
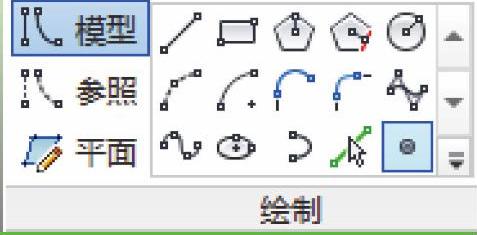
图4-62
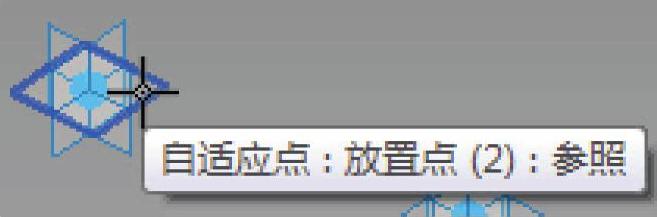
图4-63
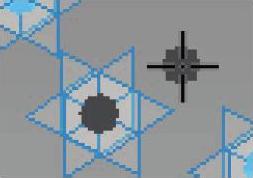
图4-64

图4-65
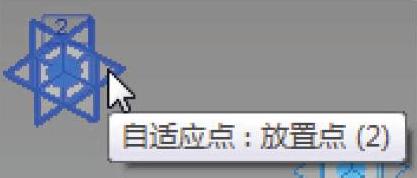
图4-66
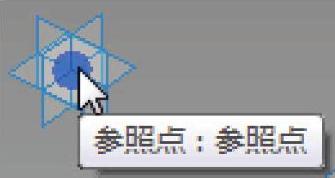
图4-67
选中以后会显示该参照点的三维控件,按住向上的蓝色箭头,把参照点拖动一段距离,如图4-68所示。为了便于观察,在“属性”栏把该参照点的偏移量改为1000,如图4-69所示。框选该参照点和它下方的自适应点,单击“绘制”模块中的“通过点的样条曲线”,如图4-70所示。这样就创建了一条模型线,作为全局坐标系Z轴方向的指示线。

图4-68

图4-69
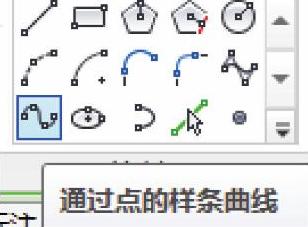
图4-70
3)为了更好地识别X、Y、Z的3个方向,还需要给该参照点加一个明显的标识。单击“创建”选项卡“工作平面”面板中的“设置”,移动光标到参照点附近,当出现如图4-71所示的蓝色预览方框时单击一次鼠标左键,即把该参照点自身的水平参照平面设置为当前工作平面。单击“创建”选项卡“绘制”面板中的“直线”(图4-72),以参照点为中心,绘制Z形折线,如图4-73所示。
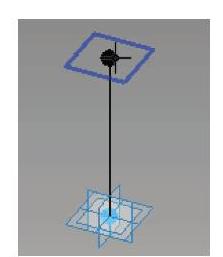
图4-71
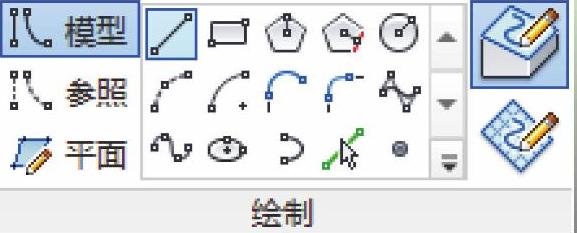
图4-72
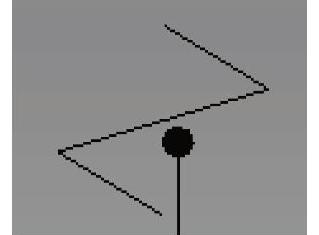
图4-73
这些线条现在都是黑色的,为了更形象地表示它所代表的方向,我们在对象样式里添加对应的子类别,以红、绿、蓝来分别对应Y、X、Z这3个方向。
单击“管理”选项卡“设置”面板中的“对象样式”,如图4-74所示。打开“对象样式”对话框,确认当前选项卡为“模型对象”,如图4-75所示。在选项卡的右下角,单击“修改子类别”分组里的“新建”按钮,如图4-76所示。
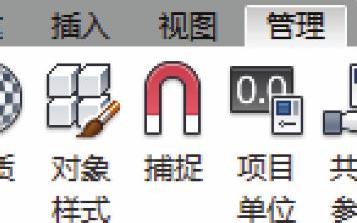
图4-74
图4-75
图4-76
这时会打开“新建子类别”对话框,如图4-77所示。输入名称“Z”,单击“子类别属于”的下拉列表,选择“常规模型”,如图4-78所示。单击“确定”按钮。可以看到,在“模型对象”选项卡的列表里已经有了该类别,如图4-79所示。
图4-77
图4-78

图4-79
接下来设置该子类别的线宽和颜色,如图4-80所示。单击“确定”按钮,使设置生效。选中刚才绘制的Z形模型线以及下方的指示线,在“修改线”选项卡的“子类别”面板的下拉列表里。选择“Z[投影]”(图4-81),把刚才的设置指定给所选择的模型线,如图4-82所示。

图4-80
图4-81
图4-82
观察构件现在的模型线,如图4-83所示,Z形线和指示线都已经是蓝色的了。再次打开“对象样式”对话框,添加X和Y的子类别,设为相同的线宽,颜色分别为绿色和红色,完成后,如图4-84所示。
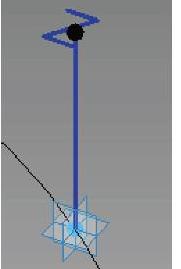
图4-83
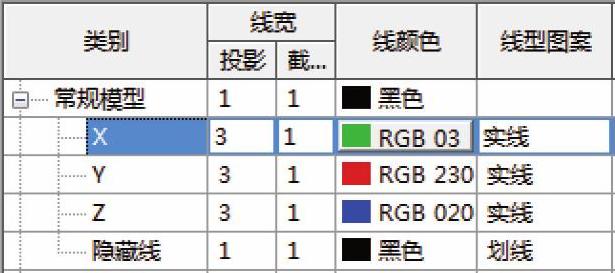
图4-84
用同样的方法,分别以自适应点的另外两个垂直平面为工作平面,添加参照点并偏移1000,用模型线做好记号“X”和“Y”,并给所有这些模型线指定对应的子类别。图4-85、图4-86和图4-87是添加参照点时选取的平面在东南方向的截图。
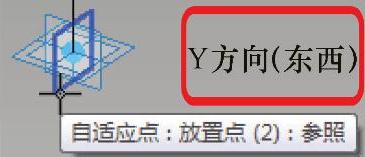
图4-85
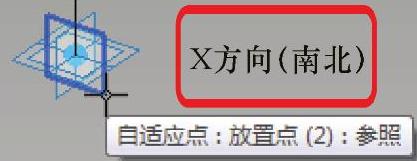
图4-86

图4-87
在3个方向都准备好以后(图4-88),单独选择这个自适应点,再检查一次,查看所做的记号是否与显示的三维控件一致,如图4-89所示(已经把该点的“显示参照平面”属性改为“从不”)。需要注意的是,加参照点的时候,是捕捉到自适应点再添加,如图4-90所示。图4-91则是捕捉到了旁边的模型线。在向外移动参照点的时候,注意移动的方向要垂直于放置它之前所设置的工作平面。
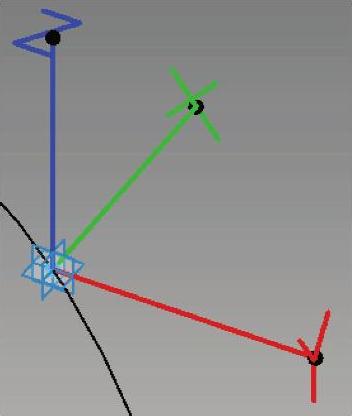
图4-88
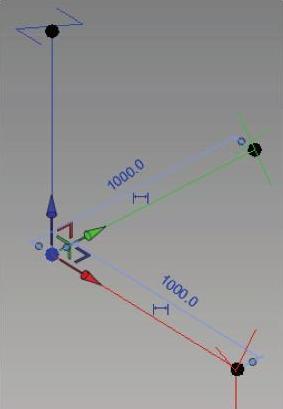
图4-89
图4-90
 (www.daowen.com)
(www.daowen.com)
图4-91
4)选中3个自适应点,单击“通过点的样条曲线”,在它们之间创建一条模型线。现在构件已经准备好了,我们在概念体量环境中搭建两个不同的曲面,来测试“方向”属性对构件的影响效果。注意,这时因为已经有曲线通过自适应点,所以在点的属性里,之前是灰色显示的“控制曲线”属性,现在会转为黑色,并且后面多了“关联族参数”的按钮,还多了一个“仅显示常规参照平面”的属性。图4-92为有曲线通过的自适应点,图4-93为单独的自适应点。
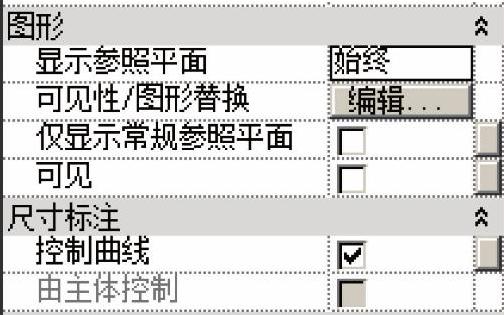
图4-92
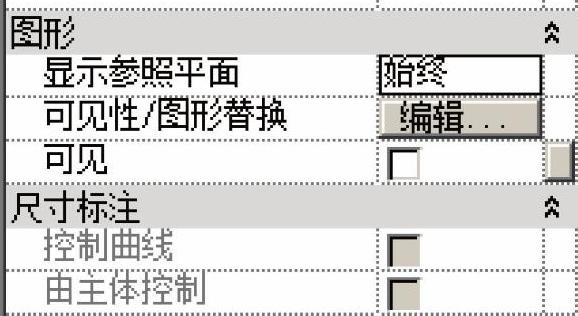
图4-93
5)新建族,选择“公制体量”样板,单击“创建”选项卡“工作平面”面板中的“设置”,在绘图区域中单击“中心(左/右)”参照平面,把它设为当前工作平面,如图4-94所示。单击“创建”选项卡“绘制”面板中的“起点-终点-半径弧”弧线绘制工具 ,按照“从上到下”的顺序绘制一段圆弧,如图4-95和图4-96所示。
,按照“从上到下”的顺序绘制一段圆弧,如图4-95和图4-96所示。
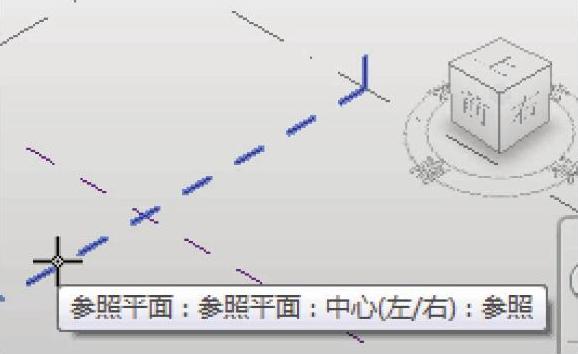
图4-94
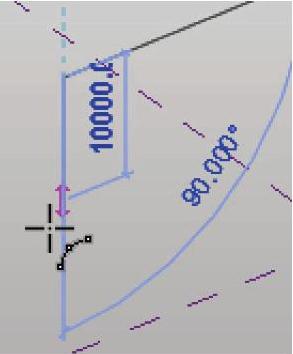
图4-95
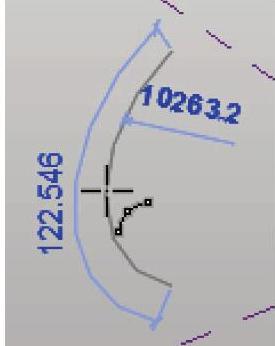
图4-96
在圆弧的右侧,也是以“从上到下”的顺序绘制一条线段,如图4-97)所示。框选这两个图形创建实心形状,单击“修改线”选项卡“形状”中的“实心形状”(图4-98),在绘图区域下方会出现可生成结果的预览图像,因为我们是要在曲面上来观察构件的形态,所以选择左侧的旋转形状,如图4-99所示。
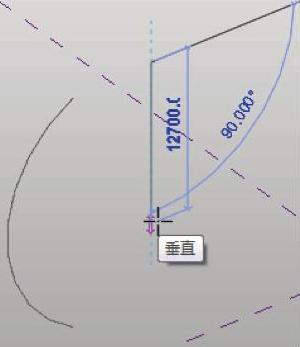
图4-97
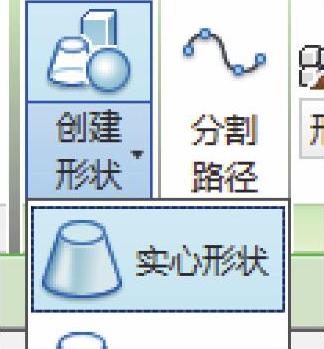
图4-98
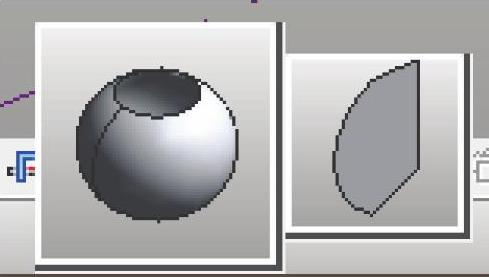
图4-99
6)光标指到旋转形状的表面,可被选择的部分将会以加粗的蓝色高亮外框作为指示(图4-100),单击一次选中它,单击“修改|形式”选项卡“分割”模块中的“分割表面”,如图4-101所示。为了放置自适应构件,还需要打开分割表面节点的显示。保持对分割表面的选择,单击“修改分割的表面”选项卡“表面表示”面板右下角的小箭头(图4-102),打开“表面表示”对话框。
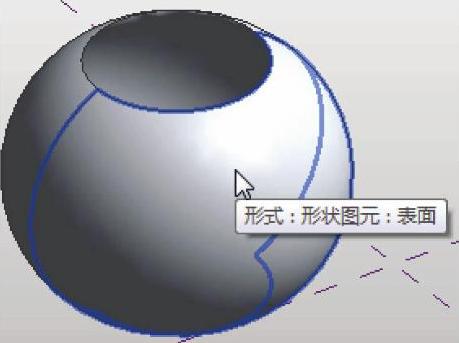
图4-100

图4-101
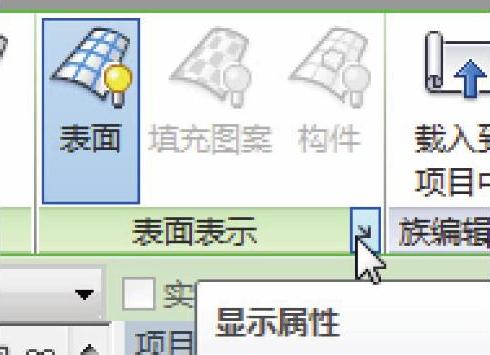
图4-102
在对话框中的“表面”选项卡里,勾选“节点”(图4-103),这样可以在表面捕捉这些节点来放置刚才制作的自适应构件。按住<Ctrl>键保持不动,再按<Tab>键,切换到刚才的自适应族。如果打开了多个视图,则在保持按下<Ctrl>键的同时反复多按几次<Tab>键,直到返回为止。选中所有的自适应点,检查“属性”栏里关于“方向”的属性,确认为“按主体参照”(图4-104),单击菜单栏最右侧的“载入到项目中”(图4-105),把这个自适应构件载入到体量族中。如果没有打开更多的项目,将会直接载入,如果同时有其他文件打开,会弹出“载入到项目中”对话框(图4-106),在其中勾选刚才创建的体量再确定即可。
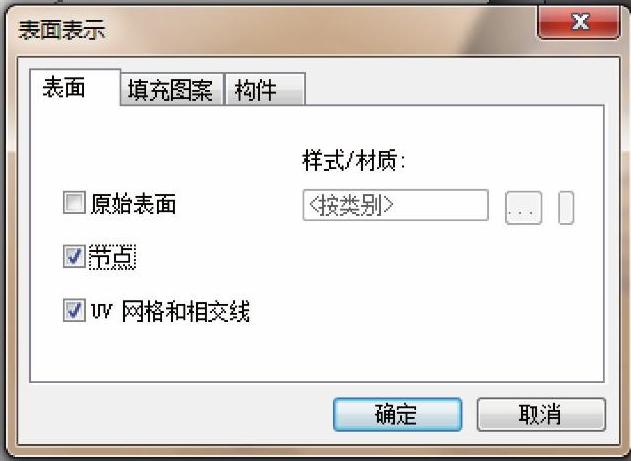
图4-103
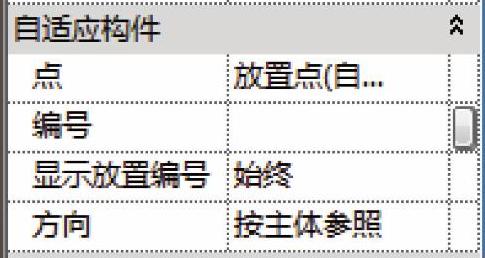
图4-104
图4-105
图4-106
7)自适应构件载入体量族以后,因为是首次载入,所以在光标的位置会有预览图像(图4-107),在分割表面上捕捉节点并按水平方向放置第一个构件。因为在构件内包含有3个自适应点,所以要单击鼠标左键3次,才可以完成一个构件的放置。在旁边的网格上再以垂直方向和对角线方向各放置一个,完成后如图4-108所示(已经隐藏了分割表面)。
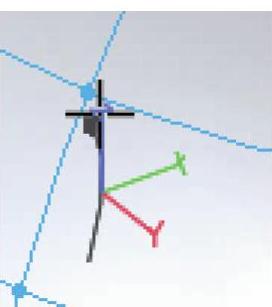
图4-107
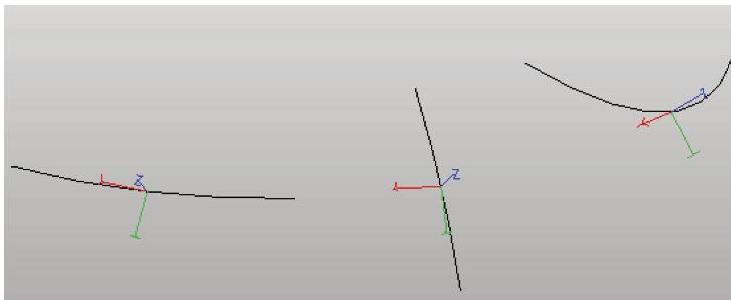
图4-108
旋转视图观察构件,可以看到,构件中的Z方向为该表面的放置点位置的法线方向,X、Y方向相当于该点沿横纵坐标方向的切线。
8)现在创建第二个曲面,还是在东南视角方向,按照“左下到右上”的顺序单击4次,绘制一条S形的样条曲线,如图4-109和图4-110所示。按2次<Esc>键结束绘制样条曲线命令。选中该曲线,单击“修改线”选项卡“形状”面板中的“实心形状”(图4-111),以生成一个曲面。

图4-109
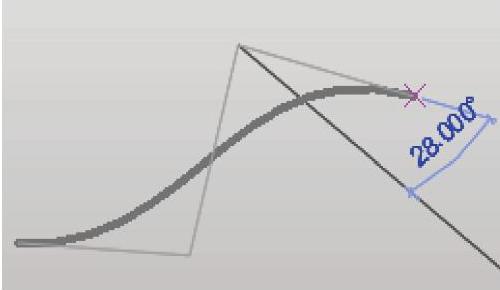
图4-110
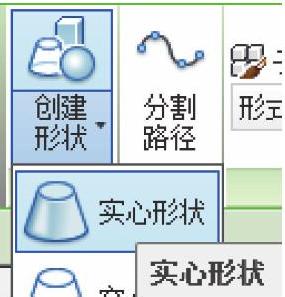
图4-111
为了便于观察效果,还需要修改该曲面。移动光标靠近曲面的顶部边缘,注意光标附近的提示信息(图4-112),在只有顶部边缘转为蓝色高亮时单击选中它,这时会出现该边缘的三维控件以及控制点,如图4-113所示。按住蓝色的箭头向上拖动一段距离,使曲面的长宽方向均衡一些,如图4-114所示。
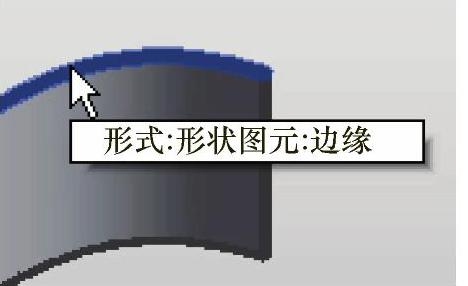
图4-112
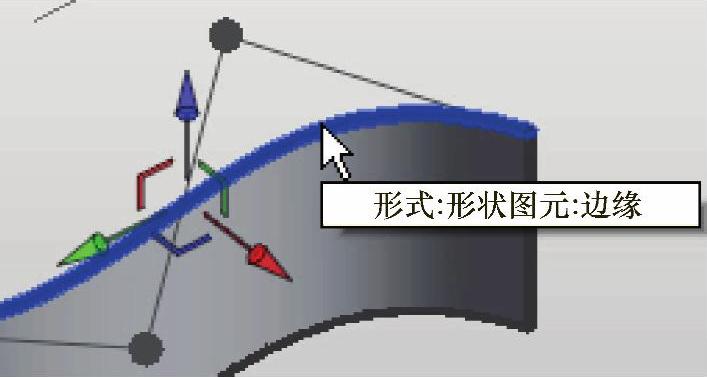
图4-113
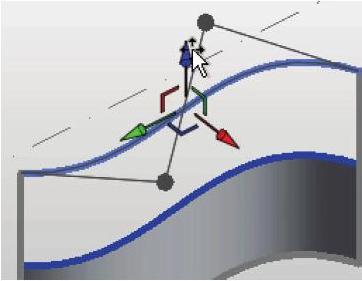
图4-114
移动光标到黑色实心圆点上,待它转为蓝色时(图4-115),单击选中它,会显示相应的三维控件,如图4-116所示。按住红色箭头向远处拖动(图4-117),这样就修改了曲面的形状,同样的把右侧的一个顶点也移动一段距离,如图4-118所示。
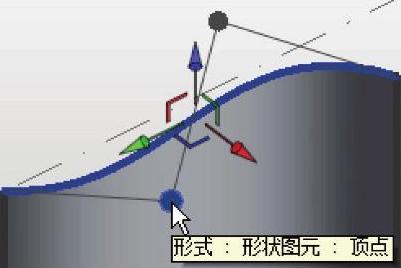
图4-115

图4-116
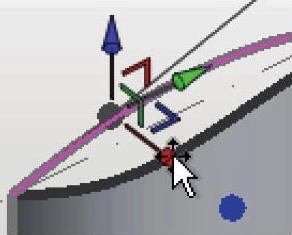
图4-117
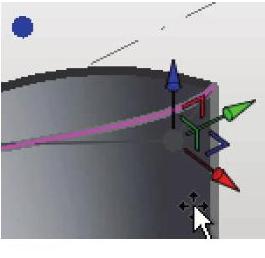
图4-118
单击选中曲面表面(图4-119),再单击“分割表面”,单击“表面表示”面板右下角的小箭头以打开“表面表示”对话框,勾选其中的“节点”(图4-120),单击“确定”按钮。
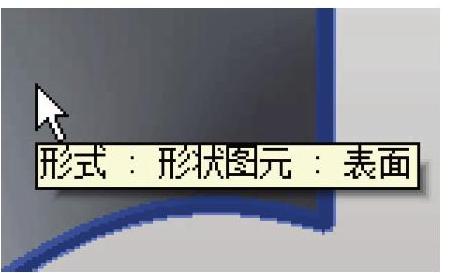
图4-119
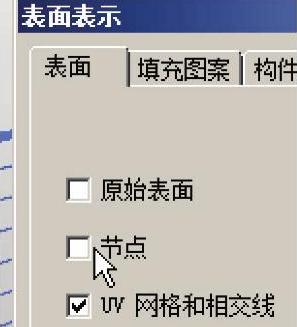
图4-120
在表面放置3个自适应构件,依次是水平、垂直、倾斜,转动视图,观察3条指示线的方向,如图4-121所示。会发现构件中的Z方向为曲面表面该点的法线方向,Y方向为生成曲面之前的曲线的绘制方向,X方向为生成曲面时的拉伸方向。如果依照原顺序绘制曲线并生成曲面以后,选择顶部的边缘,向下移动至参照标高平面以下,再分割表面放置自适应构件,则Y方向保持不变,Z方向转到曲面的另外一边,X方向则是朝下的,如图4-122所示。所以在制作比较复杂的有方向性的自适应构件时,最好是先做个简单的形状来测试分割表面的情况。
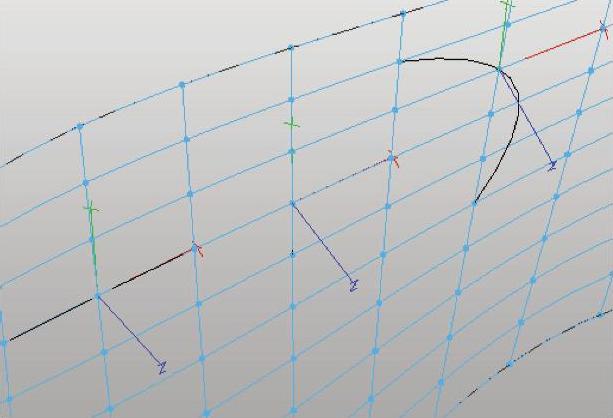
图4-121
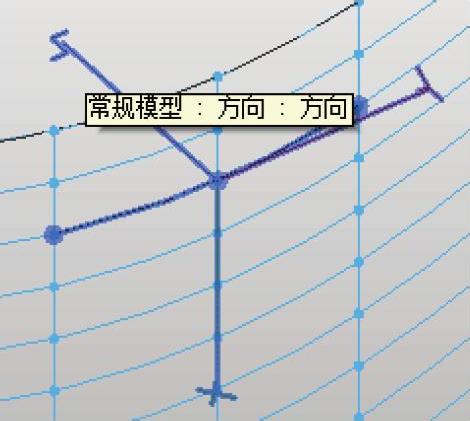
图4-122
以上是自适应点的“方向”为“按主体参照”时的情况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






