为了试验与分析的方便,还可以采用其他一些参数描述和评价汽车的稳态响应。常用的参数包括:稳态转向横摆角速度增益、转向半径比、汽车稳定性因数和静态储备系数。
1.稳态转向横摆角速度增益
汽车是一个复杂系统,转向时系统的输入为通过转向盘施加的转向轮转角δ,系统的输出为汽车的转向横摆角速度ωr。
定义 为汽车的稳态转向横摆角速度增益,表示单位转向轮转角输入使汽车产生的转向横摆角速度。显然,
为汽车的稳态转向横摆角速度增益,表示单位转向轮转角输入使汽车产生的转向横摆角速度。显然, 反映汽车绕转向中心的旋转角速度的响应速度,可用于衡量汽车对于操纵的反应灵敏程度,因此又称为转向灵敏度。
反映汽车绕转向中心的旋转角速度的响应速度,可用于衡量汽车对于操纵的反应灵敏程度,因此又称为转向灵敏度。
据式(6-8),稳态转向横摆角速度增益 等于:
等于:

由此可见:①中性转向时,有 ;②不足转向时,有
;②不足转向时,有 ;③过度转向时,有
;③过度转向时,有 。
。
2.稳定性因数
根据式(6-9)得

式中,参数K(s2/m2)称为稳定性因数,其数值等于:

由此可得汽车稳态转向特性的另一种表示方法,即
①K=0时,则 ,汽车为中性转向;②K>0时,则
,汽车为中性转向;②K>0时,则 ,汽车为不足转向;③K<0时,则
,汽车为不足转向;③K<0时,则 ,汽车为过度转向。
,汽车为过度转向。
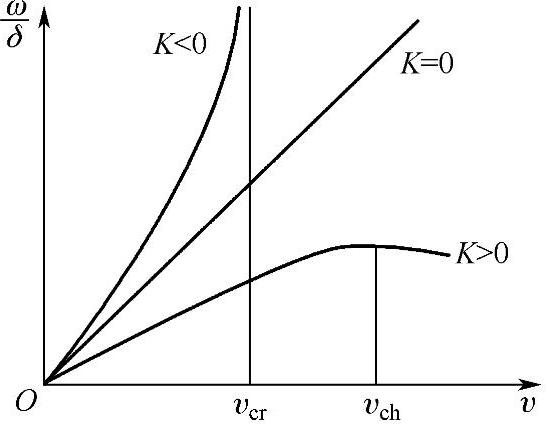
图6-15 稳态转向横摆角速度增益曲线
稳定性因数K是表征汽车稳态响应的重要参数,其重要意义在于K值把汽车结构参数(如M、L、L1、L2、k1、k2)与汽车的稳态转向特性定量结合了起来,据此不仅可判断汽车转向特性的类型,还可根据K的大小确定不足转向特性或过度转向特性的强度。同时,若已知汽车结构参数,则可据式(6-11)确定K的数值,并可绘出稳态转向横摆角速度增益 与行驶速度v的关系曲线,如图6-15所示。根据该曲线可以更清晰明了地深入分析不同转向特性汽车的运动学特征。
与行驶速度v的关系曲线,如图6-15所示。根据该曲线可以更清晰明了地深入分析不同转向特性汽车的运动学特征。
3.转向半径的比R/R0
在前轮转角δ一定的条件下,若令行驶速度极低、侧向加速度接近于零(轮胎侧偏角可忽略不计)时的转向半径为R0,而一定行驶速度下有一定侧向加速度时的转向半径为R,则这两个转向半径之比R/R0可用以表征汽车的稳态响应。
由式(6-2)可知, ,再由式(6-10)可求得
,再由式(6-10)可求得
因此,当K=0时,R/R0=1,即中性转向汽车的转向半径不随行驶速度发生变化,始终为R0。K>0时,R/R0>1,即不足转向汽车的转向半径总大于R0,且由式(6-12)可知,转向半径将随行驶速度增加而增大;K<0时,R/R0<1,即过多转向汽车的转向半径总小于R0,且由式(6-12)可知,转向半径将随行驶速度的增加而减小。(www.daowen.com)
图6-16是转向半径比值R/R0曲线与稳定性因数K值曲线。图6-16a是按式(6-12)画出的R/R0-v2曲线。根据图6-12b所示桑塔纳Xi5轿车在不同K值下的1+Kv2直线组,可以求出该型车在不同侧向加速度下的值。
4.静态储备系数
使汽车前、后轴产生相同侧偏角的侧向力作用点称为中性转向点。静态储备系数S.M.与位于汽车纵轴上的中性转向点这一概念相联系,指中性转向点至前轴的距离L′与汽车质心至前轴的距离L1之差(L′-L1)与轴距L之比值,即

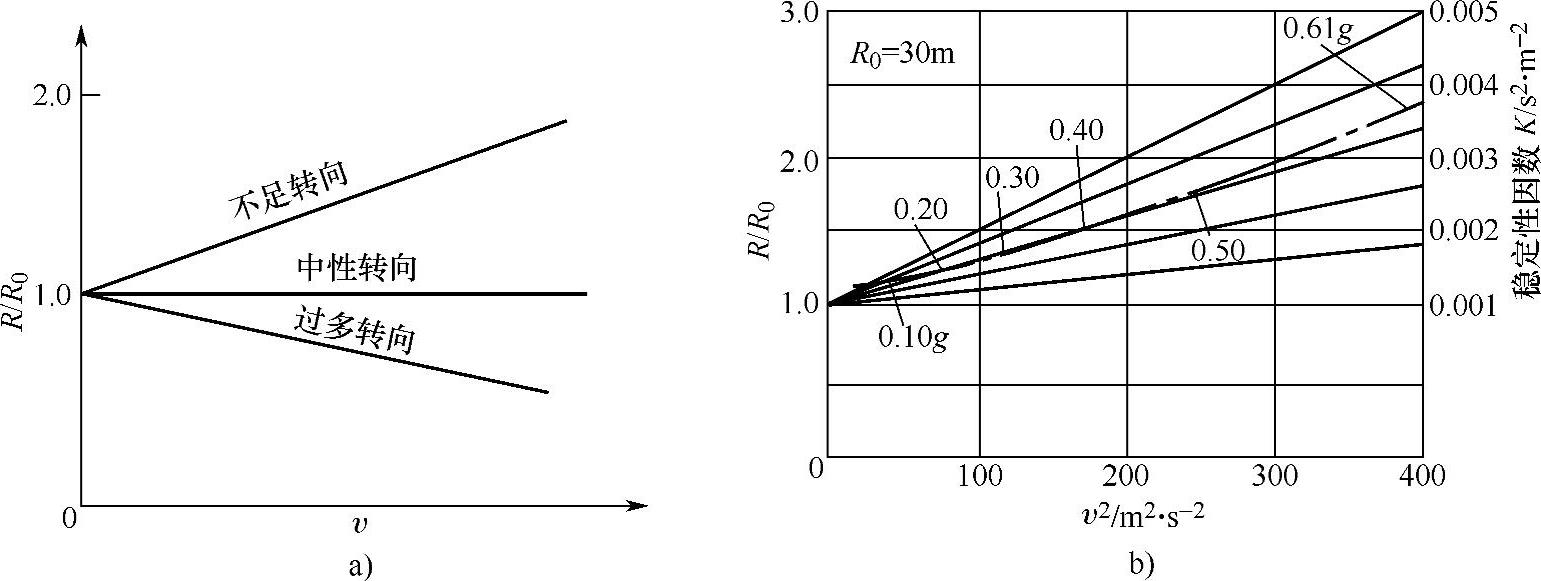
图6-16 转向半径比值曲线与稳定性因数曲线
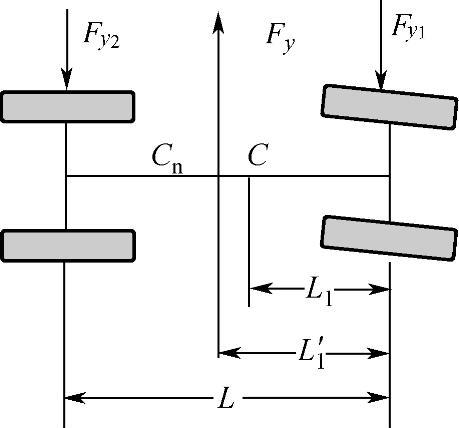
图6-17 中性转向点位置的确定
中性转向点的位置可以由力矩的平衡方程式确定,如图6-17所示。作用于中性转向点Cn的侧向力Fy分配到前、后轴上的侧向作用力分别为
Fy1=k1α
Fy2=k2α
由力矩平衡得
FyL1 ′=Fy2L
显然:Fy=Fy1+Fy2,因此中性转向点Cn到前轴的距离L′为

因此得

因此,也可以用静态储备系数S.M.表示汽车的转向特性。
当S.M.=0时,有L′-L=0,中性转向点与质心重合,作用于质心上的侧向力使α1=α2,汽车前、后轴的侧偏角相等,汽车具有中性转向特性。
当S.M.>0时,有L′-L>0,中性转向点在质心之后,作用于质心上的侧向力使α1>α2,汽车前轴侧偏角大于后轴的侧偏角,汽车具有不足转向特性。
当S.M.<0时,有L′-L<0,中性转向点在质心之前,作用于质心上的侧向力使α1<α2,汽车前轴侧偏角小于后轴的侧偏角,汽车具有过多转向特性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







