1.视距三角形
为保证交叉口行车安全,驾驶员在进入交叉口前的一定距离内,应能看到相交道路上的行车情况,以便能及时采取措施顺利驶过或安全停车。这段必要的距离应该大于或等于停车视距ST。
由相交道路上的停车视距所构成的三角形称为视距三角形。在该范围内不能有任何阻挡驾驶员视线的障碍物,如图6-18所示。视距三角形应以最不利的情况绘制,绘制的方法和步骤如下。
1)确定停车视距ST。可用停车视距计算公式计算或根据相交道路的设计速度按表6-5选用。
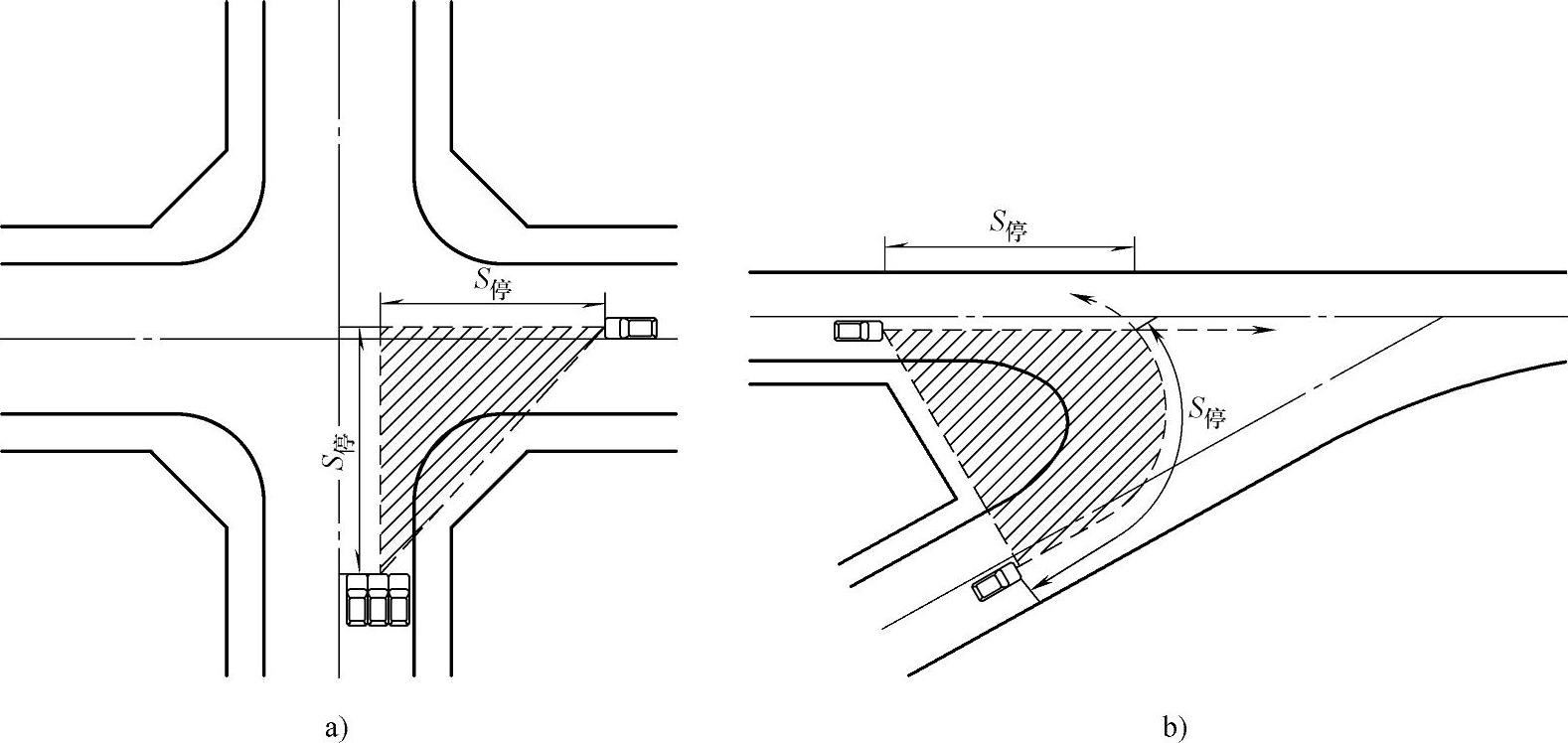
图6-18 视距三角形
a)十字形 b)T形
表6-5 安全交叉停车视距

2)找出行车最危险冲突点:不同形式交叉口的最危险冲突点不尽相同。常见十字形和T形(或Y形)交叉口的最危险冲突点可按下述方法确定。对十字形交叉口,如图6-18a所示,最靠右侧第一条直行机动车道的轴线与相交道路最靠中线的第一条直行车道的轴线所构成的交叉点为最危险冲突点。对T形(或Y形)交叉口,如图6-18b所示,直行道路最靠右侧第一条直行车道的轴线与相交道路最靠中线的一条左转车道的轴线所构成的交叉点为最危险冲突点。
3)从最危险冲突点向后沿行车轨迹各量取停车视距ST。
4)连接末端构成视距三角形。
条件受限不能保证由停车视距构成的视距三角形时,应保证主要道路的安全交叉停车视距和次要道路至主要道路边车道中线5~7m所组成的视距三角形,如图6-19所示。安全交叉停车视距值规定见表6-5。
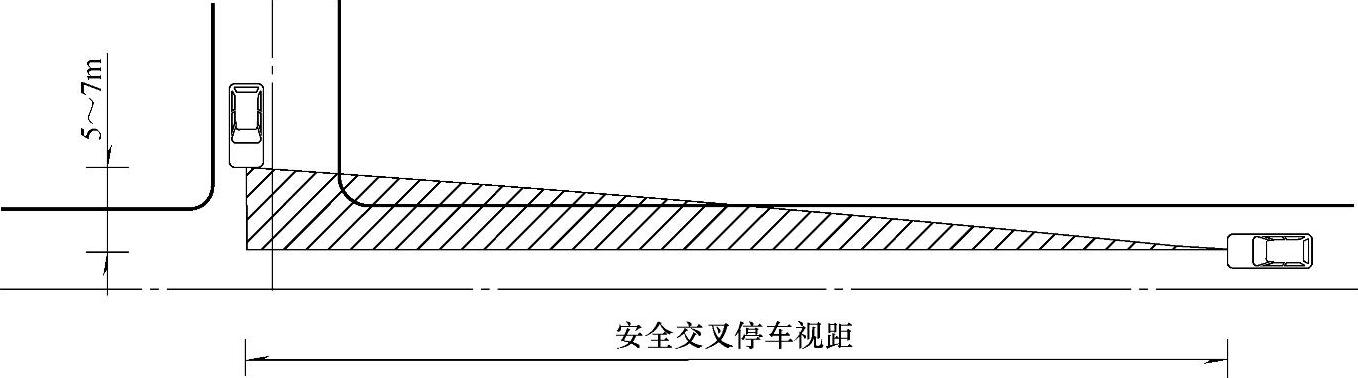
图6-19 安全交叉停车视距三角形
对信号交叉口,各进口道的车辆受信号控制,速度低且直接冲突少,信号交叉口的视距,只要满足任一条车道路口停车线前第一辆车的驾驶员看到相邻路口第一辆车即可,如图6-20所示。(https://www.daowen.com)
2.识别距离
为了保证车辆能够安全顺利地通过交叉口,应使驾驶员能够在交叉口之前的一定距离内识别交叉口的存在及交通信号和交通标志等,这一距离称为识别距离。识别距离随交通管制条件而异。
(1)无信号控制交叉口 对无信号控制的交叉口,多是等级低、交通量小及车速不高的次要交叉口,识别距离可采用各相交道路的停车视距。
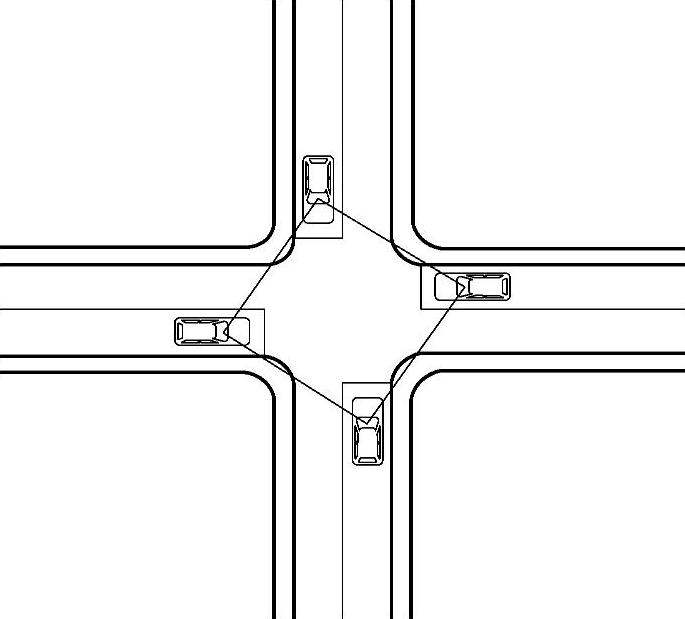
图6-20 信号交叉通视三角区
(2)有信号控制交叉口 对有信号控制的交叉口,识别距离为使正常行驶的驾驶员能看清交通信号和显示内容,有足够时间制动减速直至停车,但这种制动停车并非紧急制动,识别距离可用下式计算

式中 Ss——交叉口的识别距离(m);
v——路段设计速度(km/h);
a——减速度(m/s2),取a=2m/s2;
t——识别时间(s)。
识别时间t包括驾驶员的反应时间和制动生效时间。在公路上识别时间可取10s;在城市道路上因交叉口较多,驾驶员对其存在已有思想准备,识别时间可取6s。
(3)停车标志控制交叉口对停车标志控制的交叉口,一般为主要道路与次要道路交叉,主次关系明确,且对标志的识别要比对信号容易,可采用式(6-11)及识别时间为2s计算。信号控制及停车标志控制交叉口的识别距离见表6-6,在此范围内不应有任何障碍物。
表6-6 交叉口识别距离

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





