汽车在路上行驶,除保证直线段上的行车视距外,还应保证曲线上的行车视距,以确保行车安全。在高速公路平面上的暗弯(处于挖方路段的曲线和内侧有障碍物的曲线)、纵断面上的凸型竖曲线、下穿式立体交叉的凹型竖曲线上、中央分隔带内侧都有可能存在视距不足的问题。
对于纵断面上的凸型竖曲线及下穿式立体交叉凹型竖曲线上的视距问题,在规定竖曲线的最小半径时已作了考虑。在设计时,只要满足规范中最小竖曲线半径的要求,也就同时满足了竖曲线上视距的要求。所以,在视距检查中,应重点注意弯道内平面视距能否保证。如有遮挡,必须清除弯道内侧一定范围内的障碍物。若是因平曲线内侧设置的人工构造物,或中间带设置防眩设施而不能保证视距时,可采取加宽中间带、加宽路肩或将构造物后移等措施予以处理;若阻挡视线的是树木、房屋等,应通过清除保证;若阻挡视线的是挖方边坡,则应按所需净距绘制包络线开挖视距台保证。如图3-19所示,驾驶员的视线距离路面1.2m(货车可取2.0m),驾驶员座位距未设加宽的路面外边缘1.5m。
车辆在弯道上行驶时视点的运动轨迹半径为

式中 R——弯道圆曲线半径(m);
B——弯道路面宽度(m)。
检查弯道内平面视距是否能保证的方法有两种,一是视距曲线法,一是横净距法。
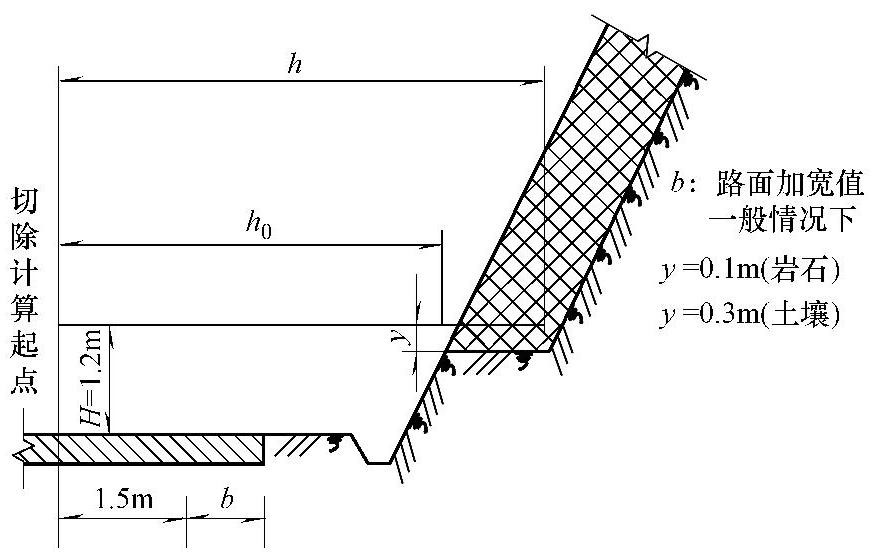
图3-19 开挖视距台断面
1.视距曲线
如图3-20所示,AB是行车轨迹线,从汽车行驶轨迹线上的不同位置(图中的1、2、3、…各点)引出一系列视线(图中的1—1′、2—2′、3—3′…),它们的弧长都等于视距S,与这些线相切的曲线(包络线)称为视距曲线。在视距曲线与轨迹线之间的空间范围,是应保证通视的区域,在这个区域内如有障碍物则要予以清除。
2.横净距及其计算
横净距是指在弯道各点的横断面上,汽车轨迹线与视距曲线之间的距离。在弯道内所有横净距中的最大值,称为最大横净距,用h表示。其值可根据视距s和弯道的曲线长L、行车轨迹曲线半径Rs算出。
(1)不设缓和曲线的横净距 根据视点轨迹曲线长度和设计视距之间的大小关系,计算方法分两种情况。
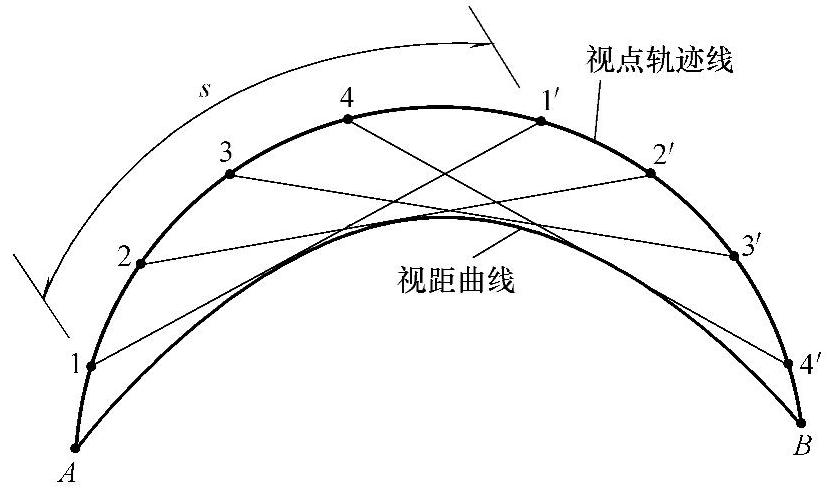
图3-20 弯道内侧应保证通视的区域
1)L>s,如图3-21所示,由几何关系可得知

式中 Rs——视点轨迹半径(m);
γ——设计视距所对应的圆心角(°), 。
。
2)L<s,如图3-22所示,由几何关系可知,横净距有两部分组成,即曲线部分的最大净距和直线段部分最大净距之和,h=h1+h2,即

式中 L——视点轨迹曲线长度(m), ;(https://www.daowen.com)
;(https://www.daowen.com)
α——对应的圆心角,即路线转角。
(2)设缓和曲线的横净距计算 设置缓和曲线的平曲线处横净距的计算同样根据视点轨迹曲线长度L、圆曲线长度L′与设计视距s大小关系,可分为下列三种情况。
1)L′>s。该情况的计算方法与前述不设缓和曲线的第一种情况类似,即
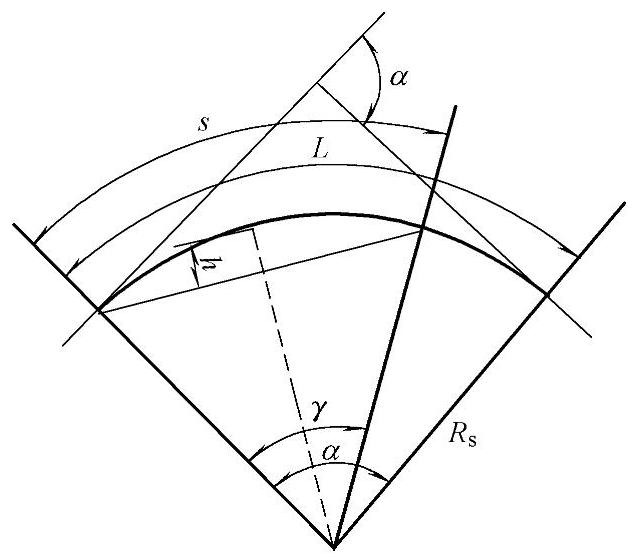
图3-21 横净距计算图(L>s)
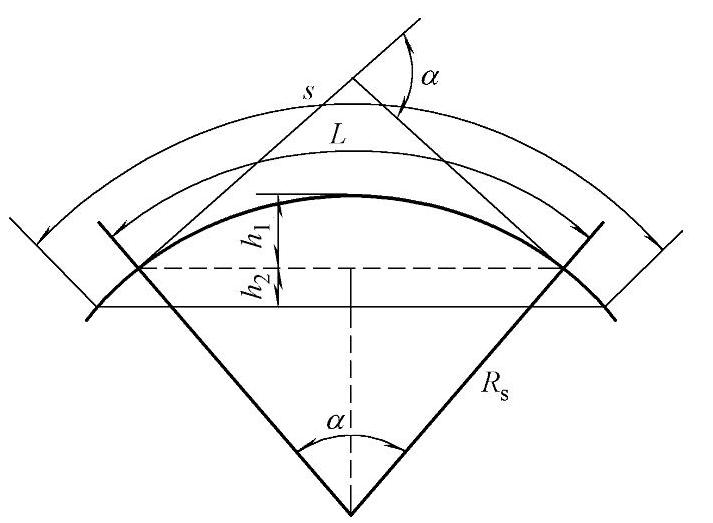
图3-22 横净距计算图(L<s)

2)L>s>L′,如图3-23所示,该情况的横净距由两部分组成,即圆曲线部分和部分缓和曲线的横净距之和,h=h1+h2,即

式中 l——缓和曲线长度(m);
l′——驾驶员位置到缓和曲线起点的距离(m), ;
;
δ——过M或N点且与平曲线的导线相平行的直线与视点到HY点连线的夹角(rad) ;
;
β——缓和曲线角(°)。
3)L<s,如图3-24所示。
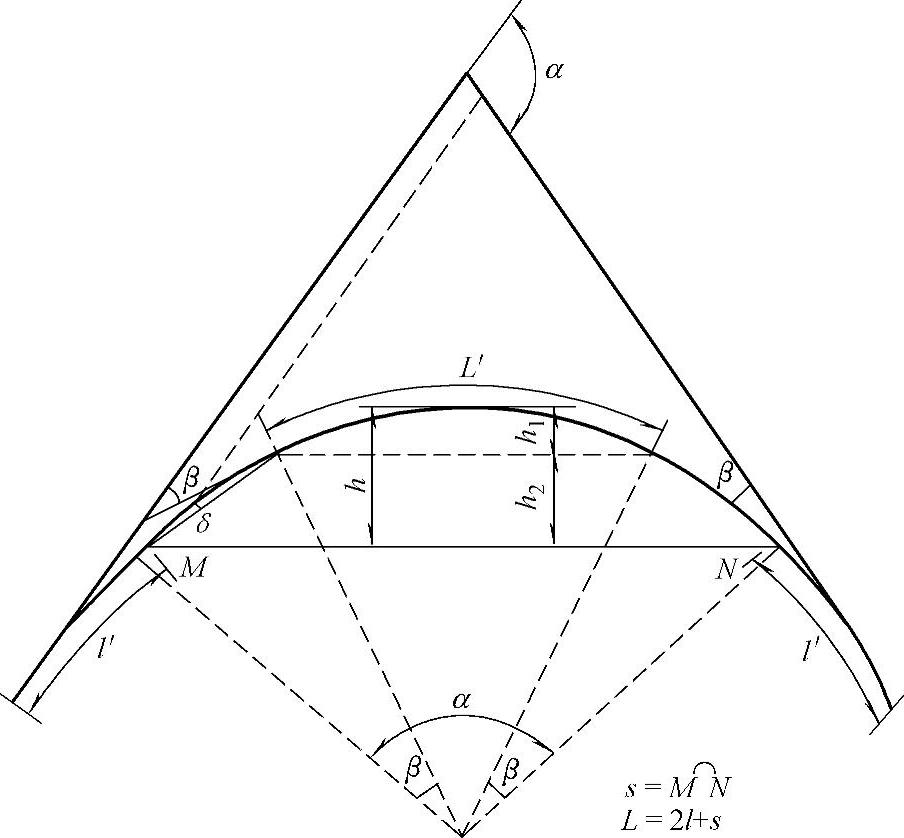
图3-23 横净距计算图(L>s>L′)
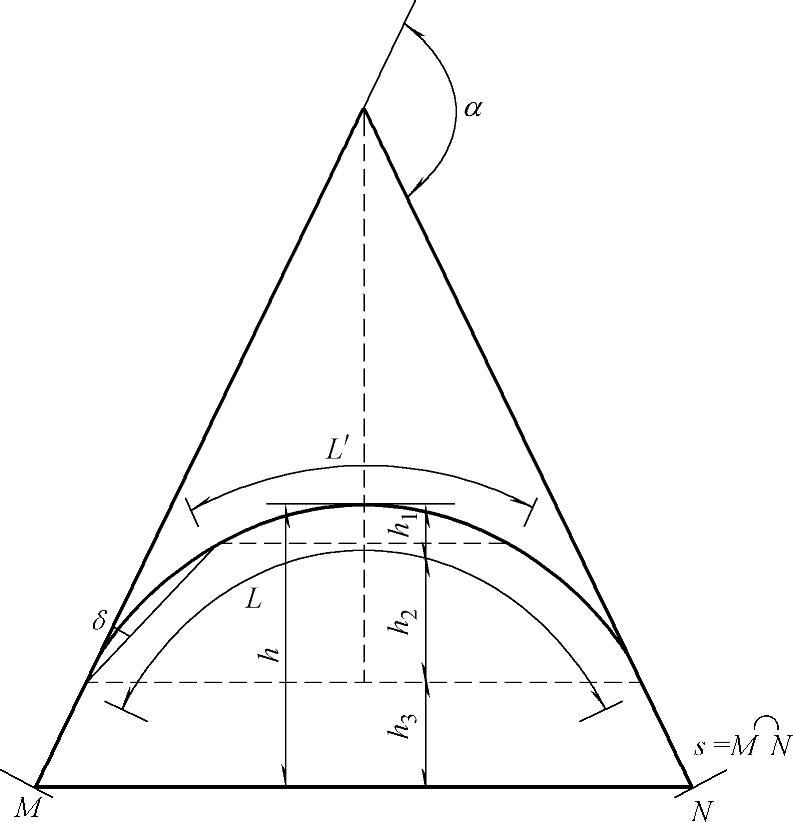
图3-24 横净距计算图(L<s)

式中, 。
。
将按式(3-40)计算的h值与弯道内侧的障碍物与行车线之间的距离加以比较,则可确定该弯道是否能保证视距并进而确定清除范围,但h是曲线上需清除的最大横净距。对于需要清除的是贵重建筑物或岩石边坡,则可用图解法或解析法求出弯道上不同断面的清除界线,并要增绘一些横断面以作为计算土石方和施工时的根据。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






