1.停车视距
停车视距(sT)可分解为反应距离(s1)和制动距离(s2)两部分来研究。
(1)反应距离 反应距离是当驾驶员发现前方的阻碍物,经过判断决定采取制动措施的那一瞬间到制动器真正开始起作用的那一瞬间汽车所行驶的距离。这段时间又可分为“感觉时间”和“反应时间”。
感觉时间在很大程度上取决于物体的外形、颜色、驾驶员的视力和机敏度以及大气的可见度等。在高速行车时的感觉时间要比低速时短一些,这是由于高速行驶时警惕性会更高的缘故。
根据实测资料,设计上采用感觉时间为1.5s,制动反应时间为1.0s,感觉和制动反应的总时间t=2.5s。在这个时间内汽车行驶的距离为

(2)制动距离 制动距离是指汽车从制动生效到汽车完全停住,这段时间内所走的距离。通常按下式计算

因此,停车视距计算公式为

式中 φ——纵向附着系数。依据车速及路面状况而定,一般按路面在潮湿状态下计算,不
同设计车速下的φ值见表3-11。
v——行车速度(km/h),设计行车速度为80~120km/h时,采用设计速度的85%;
40~60km/h时,采用设计行车速度的90%;20~30km/h采用原设计速度。
各级公路和城市道路的停车视距见表3-12和表3-13。
表3-11 不同设计车速下的φ值

表3-12 各级公路停车视距

表3-13 城市道路停车视距

2.超车视距
在一般双车道公路上行驶着各种不同速度的车辆,当快速车追上慢速车以后,需要占用供对向汽车行驶的车道进行超车。为了超车时的安全,驾驶员必须能看到前面足够长度的车流空隙,以便在相邻车道上没有出现对向行驶来的汽车之前完成超车而不阻碍对向汽车的行驶。超车视距图示如图3-18所示。
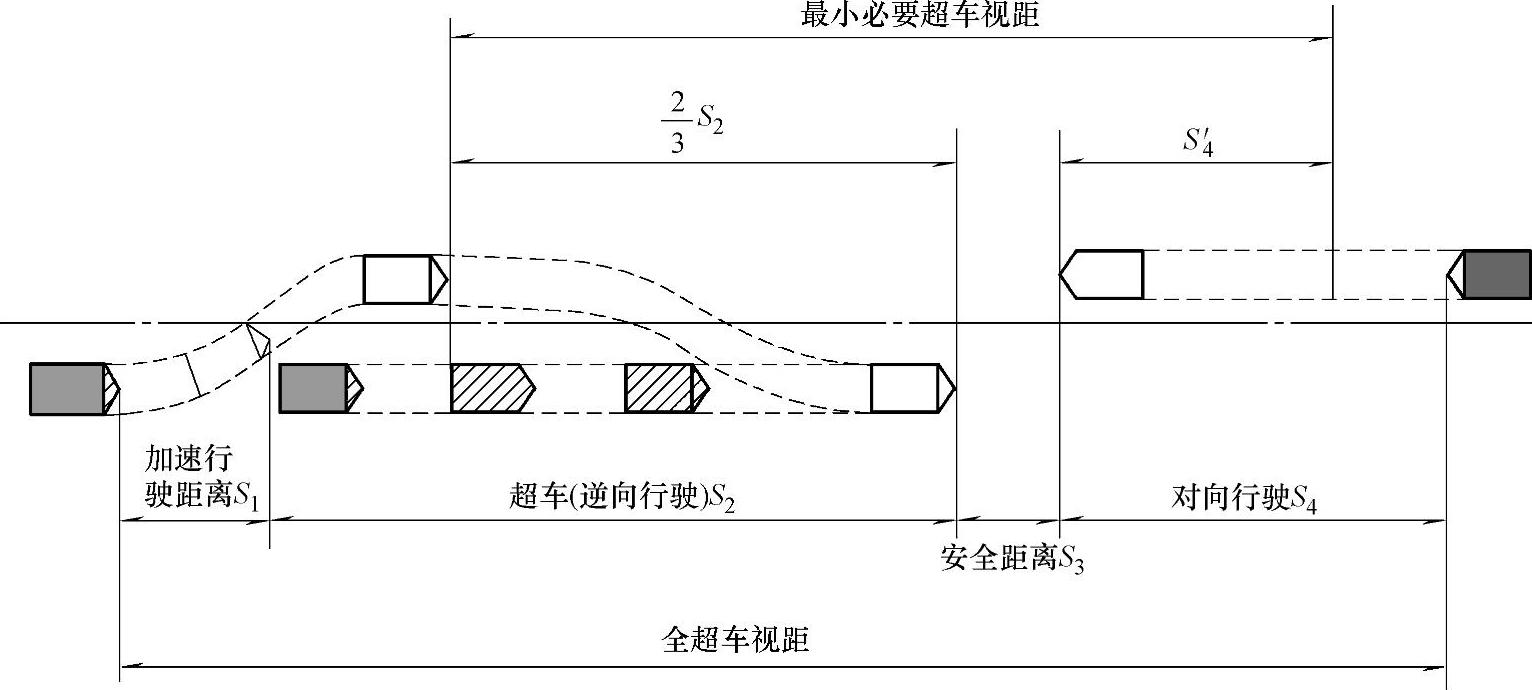
图3-18 超车视距图示(https://www.daowen.com)
超车视距的全程可分为四个阶段:
(1)加速行驶距离s1当超车汽车经判断认为有超车可能,于是加速行驶移向对向车道,在进入该车道的行驶距离为s1

式中 v0——被超汽车的速度(km/h);
t1——加速时间(s);
a——平均加速度(m/s2)。
(2)超车汽车在对向车道上行驶的距离s2

式中 v——超车汽车的速度(km/h);
t2——在对向车道上的行驶时间(s)。
(3)超车完了时,超车汽车与对向汽车之间的安全距离s3这个距离视超车汽车和对向汽车的行驶速度不同采用不同的数值,一般取
s3=15~100m (3-30)
(4)超车汽车从开始加速到超车完了时对向汽车的行驶距离s4

以上四个距离之和是比较理想的全超车过程,但距离较长,在地形比较复杂的地点很难实现。实际上在计算s4所需的时间时,只考虑超车汽车从完全进入对向车道到超车完了所行驶的时间就可保证安全了。因为,尾随在慢车后面的快车驾驶员往往在未看到前面的安全区段就开始了超车作业,如果进入对向车道之后发现迎面有汽车开来而距离不足时还来得及返回自己的车道。因此,对向汽车行驶时间大致为t2的2/3就足够了,即

于是,最小必要超车视距为
sc=s1+s2+s3+s4′ (3-33)
在地形困难或其他原因不得已时,可采用

v采用设计速度。设超车汽车和对向汽车都按设计速度行驶,被超汽车的速度v0较设计速度低5~20km/h,各阶段的行驶时间据实测大致为t1=2.9~4.5s、t2=9.3~10.4s。以此进行计算的超车视距经整理见表3-14。
表3-14 超车视距

注:“一般值”为正常情况下的采用值;“最小值”为条件受限制时可采用的值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






