1.多路集成控制系统结构
2003年款本田雅阁轿车采用的多路集成控制系统MICS(Multiplex Integrated Control Sys-tem)由车身控制器局域网B-CAN(Body Controller Area Network)和快速控制器局域网F-CAN(Fast Controller Area Network)组成。本田雅阁轿车各局域网控制模块见表9-1。
表9-1 本田雅阁轿车各局域网控制模块

B-CAN通信以单线进行数据传输,传输速率为33.3kbit/s,适用于对通信速度要求不高的舒适控制系统。F-CAN以双绞线进行数据传输,传输速率为500kbit/s,适用于一些对“实时性”要求高的控制系统。另外还有应用了传输速率为10.4kbit/s的K-LIN作为诊断总线。仪表控制模块为多路传输系统网关。多路传输系统控制模块安装位置如图9-1所示,系统拓扑结构如图9-2所示。
在B-CAN和F-CAN中各控制模块用统一的格式来进行数据传输。数据通过一条通信导线在各控制模块之间传输。这样,数据可以在同一时间被局域网上的其他控制模块接收。由于F-CAN上的数据更为重要,所以F-CAN中还用另一条导线对通信线路进行监测。另外,B-CAN内前照灯和刮水器电路中还有一个备用电路,以防止在通信线路或控制模块损坏时,影响它们正常工作。
2.多路集成控制系统原理
一个ECU监视一个信号输入,然后通过通信回路发送信息,使用该信息的ECU均为接收者。例如,组合开关控制装置监视着刮水器开关,当刮水开关被置于低速档位置时,组合开关控制装置会将此信息发送至通信回路,继电器控制模块接收到该信息后,为刮水器电动机低速档继电器接地,以接通刮水器低速档电路。刮水器电动机控制电路如图9-3所示。
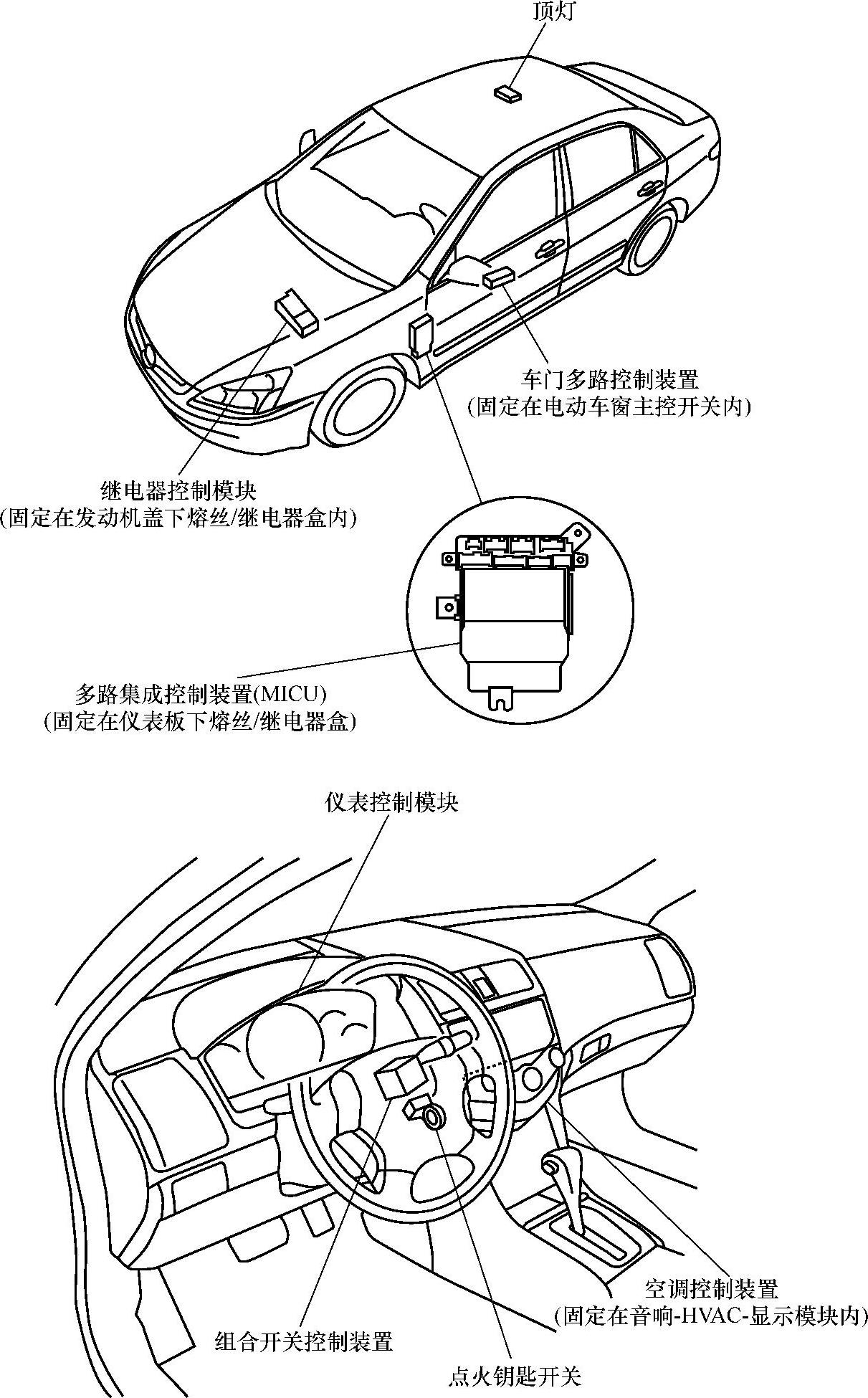
图9-1 多路传输系统控制模块安装位置
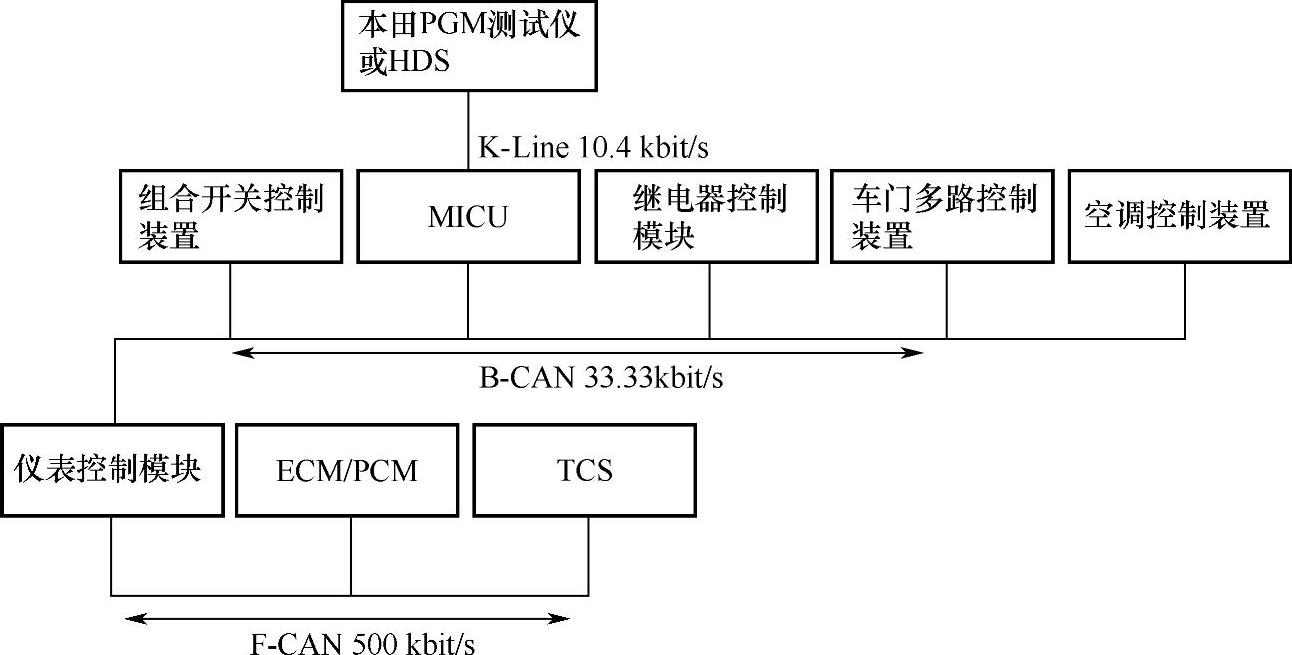
图9-2 多路传输系统拓扑结构
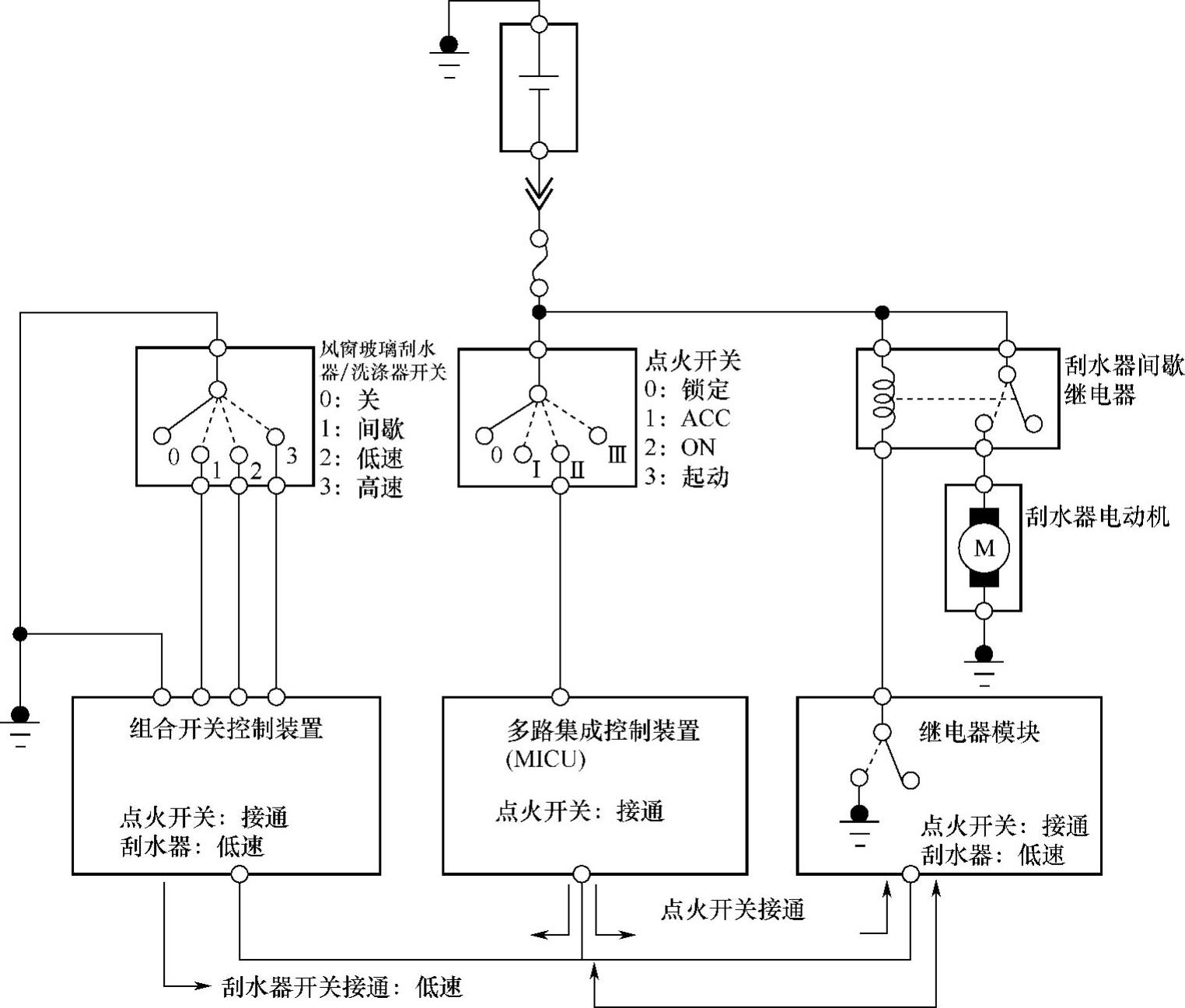
图9-3 刮水器电动机控制电路
3.B-CAN系统控制原理
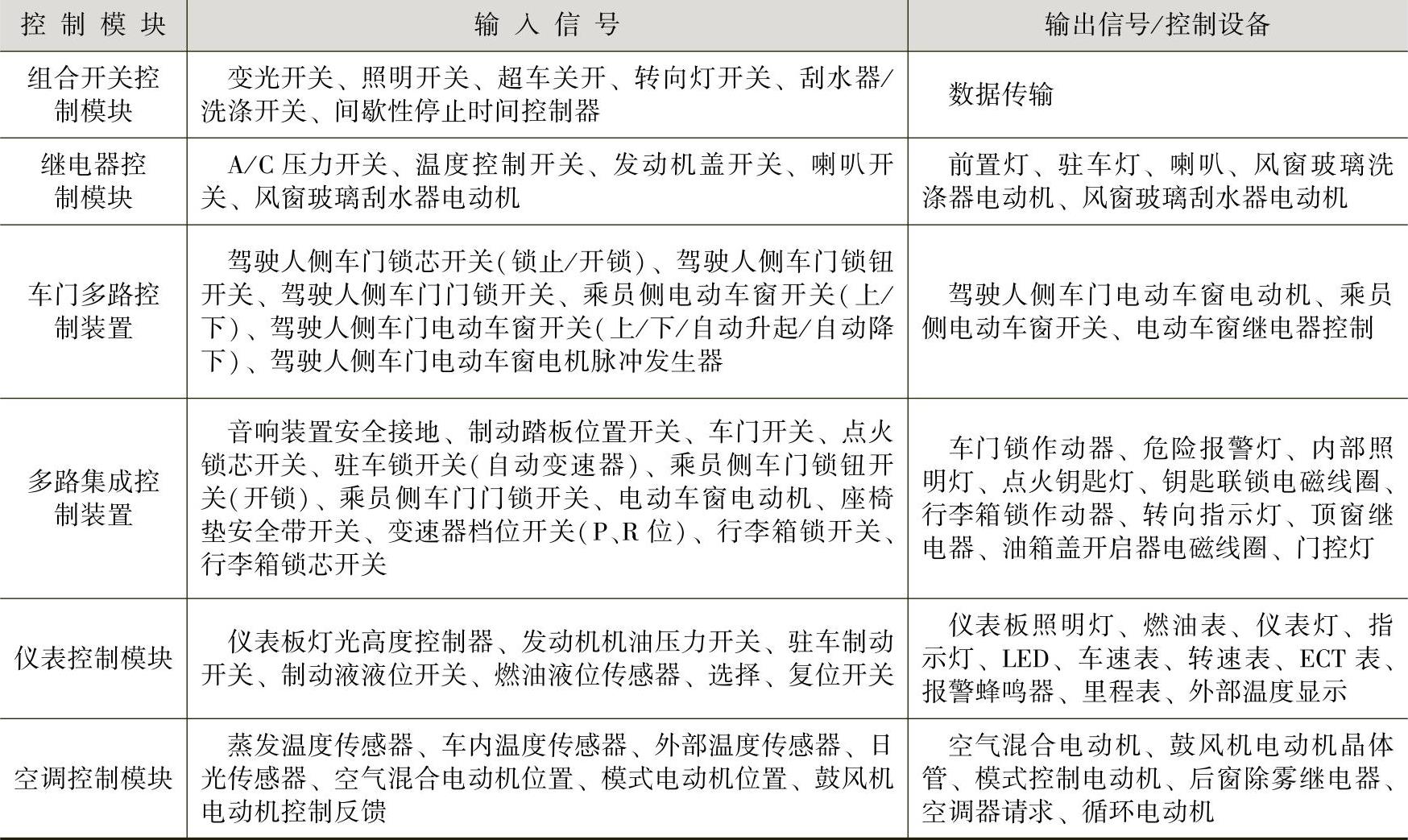
B-CAN系统组成如图9-4所示,各控制单元的输入/输出信号见表9-2。(https://www.daowen.com)
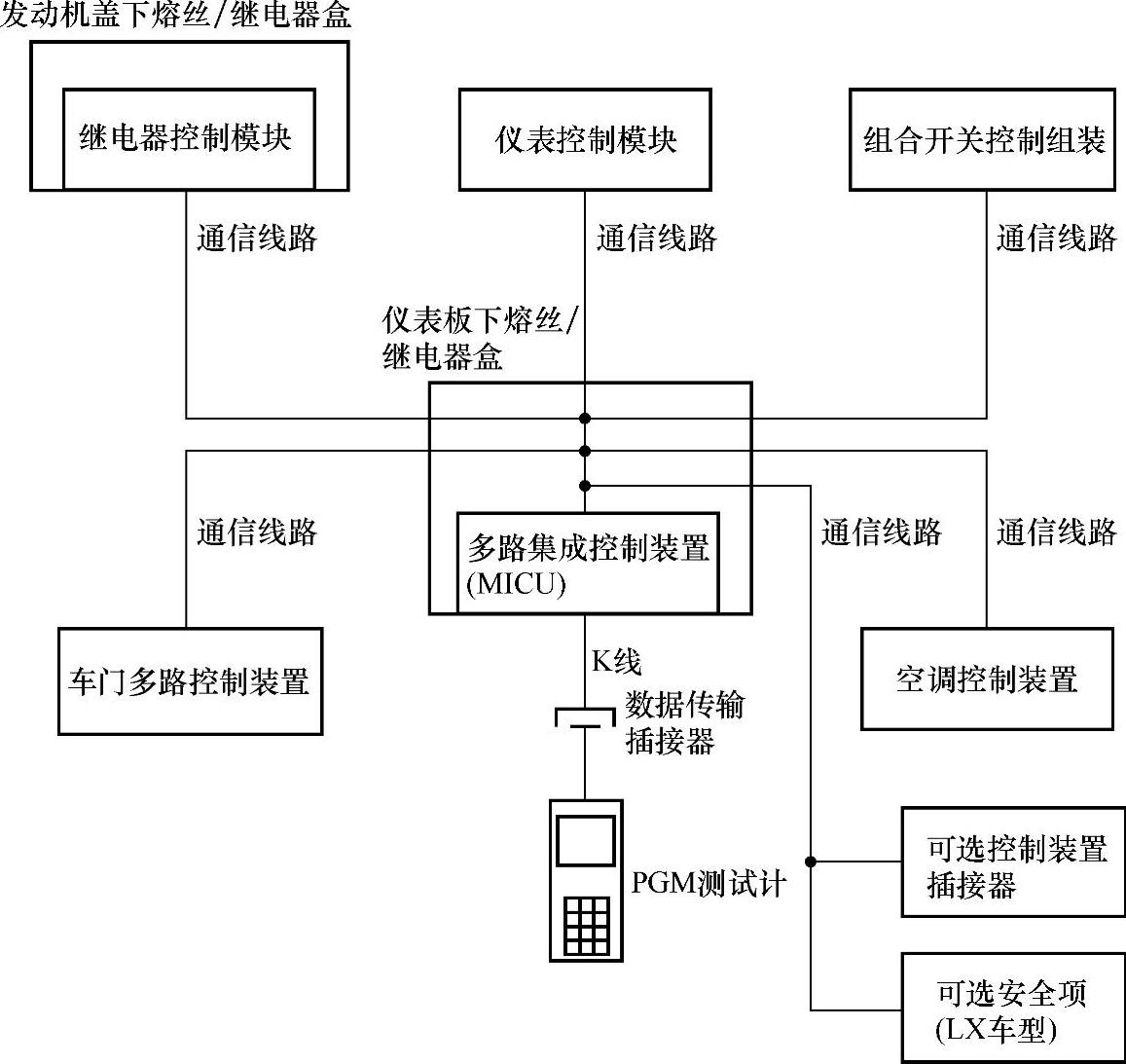
图9-4 B-CAN系统组成
表9-2 B-CAN各控制单元的输入/输出信号
4.故障码
多路传输系统的故障码类型见表9-3。
表9-3 多路传输系统的故障码类型

5.网络“失去通信”错误检查
B-CAN和F-CAN系统使用信息来检查网络通信回路的完整性,其方法是:在一特定事件后发送一条特定信息,如点火开关切换至ON位置,当事件发生后,通信回路上的所有ECU均等待在一规定的时间内从某个特定装置收到一条信息,如果未收到信息,则ECU会发送一个DTC,以报告它没有收到该信息。
(1)正常回路 点火开关置于ON,车门多路控制装置发送一条车门锁开关信息,MICU、继电器模块和仪表控制模块收到车门锁开关信号,则通信回路测试通过。由于所有期待信息的ECU均收到了车门锁开关信息,所以这些装置间的通信回路被判定为功能正常。
(2)故障回路 点火开关置于ON,车门多路控制装置发送一条车门锁开关信息,MICU、继电器模块和仪表控制模块均期待收到车门锁开关信号,但由于通信回路有一处为开,所以没能收到信息。每一个期待从车门多路控制装置收到车门锁开关信号的ECU将由于没有收到信息而产生DTC。
如图9-5所示,由于通信回路存在断路,门锁开关信息无法被仪表控制模块、MICU和继电器控制模块收到,这些装置均会发送“失去通信”故障码。在通信电路测试过程中,与网络失去联系的装置,通常会发送多条信息,因而可能存在多个通信DTC。
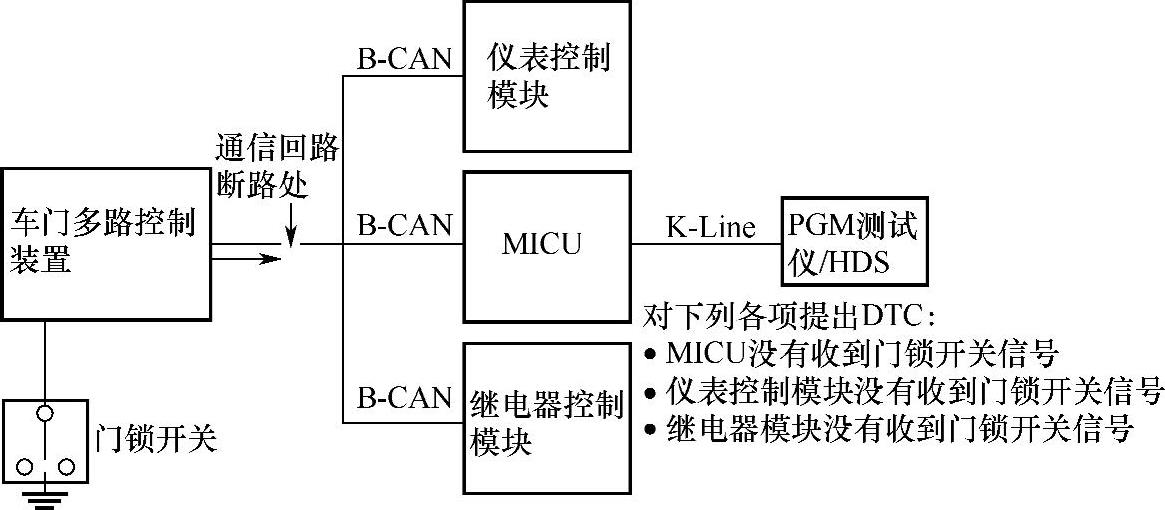
图9-5 通信回路存在断路故障示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






