
1.LIN数据总线系统
LIN数据总线是一个局部的系统,该系统通过数据传输率为1~20kbit/s的单线连接传输数据。传输率被存储在主控制单元的软件中。数据交换在一个主控制单元和最多16个从控制单元之间进行。参与者之间的通信仅通过主控制单元被初始化,该主控制单元也可在CAN数据总线上进行通信。
LIN总线采用单线主、从控制器控制,如图7-41所示,车内监控传感器G273、车辆侧倾传感器G384、报警喇叭H12通过主控单元(舒适系统中央控制单元J393)向总线系统发送传感器信号,同时也通过主控单元接收控制信号。G397晴雨与光线识别传感器、J400刮水器电动机控制单元通过车载电网控制单元J519供电。
2.CAN数据总线——电动驻车制动器
电动驻车制动器CAN数据总线的数据传输速度为500kbit/s。传输通过高电平CAN数据线和低电平CAN数据线进行。为了保证数据安全传输,CAN导线相互扭转连接。CAN数据总线驱动不可单线工作,在其中一根CAN导线发生故障时无法进行数据传输,电动驻车制动器CAN数据总线控制单元的拓扑结构图如图7-42所示。
3.CAN数据总线——高级前灯照明系统(Advanced Front lighting System)
转向灯CAN数据总线的数据传输速度为500kbit/s。传送通过高电平CAN数据线和低电平CAN数据线进行。为了保证数据安全传输,CAN导线相互扭转连接。转向灯CAN数据总线不可单线工作,在其中一根CAN导线发生故障时则无法进行数据传输,转向灯CAN数据总线中的控制单元拓扑结构图如图7-43所示。
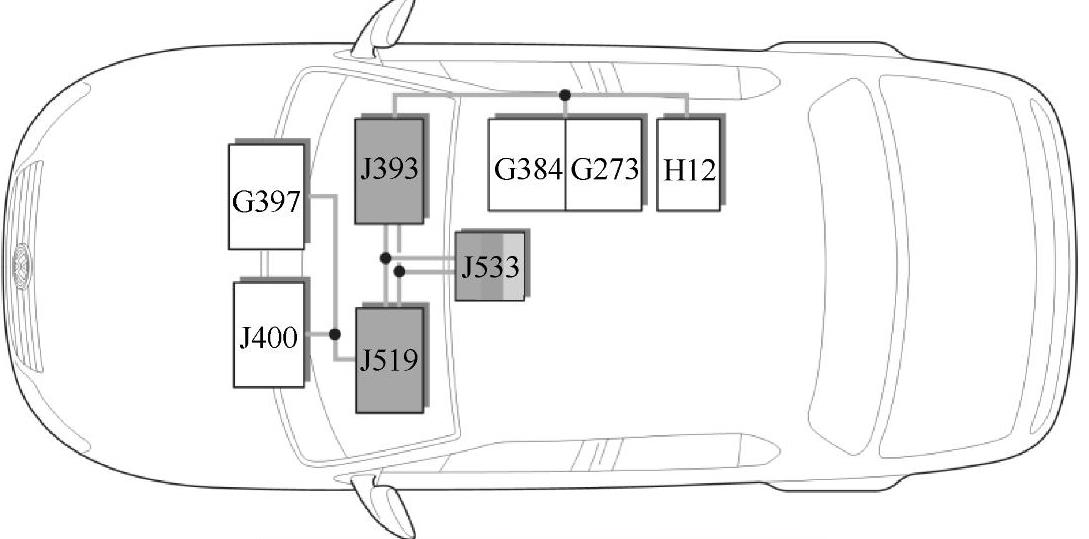
图7-41 LIN数据总线控制单元
G273—车内监控传感器 G384—车辆侧倾传感器 G397—晴雨与光线识别传感器 H12—报警喇叭 J393—舒适系统中央控制单元 J400—刮水器电动机控制单元 J519—车载电网控制单元 J533—数据总线诊断接口
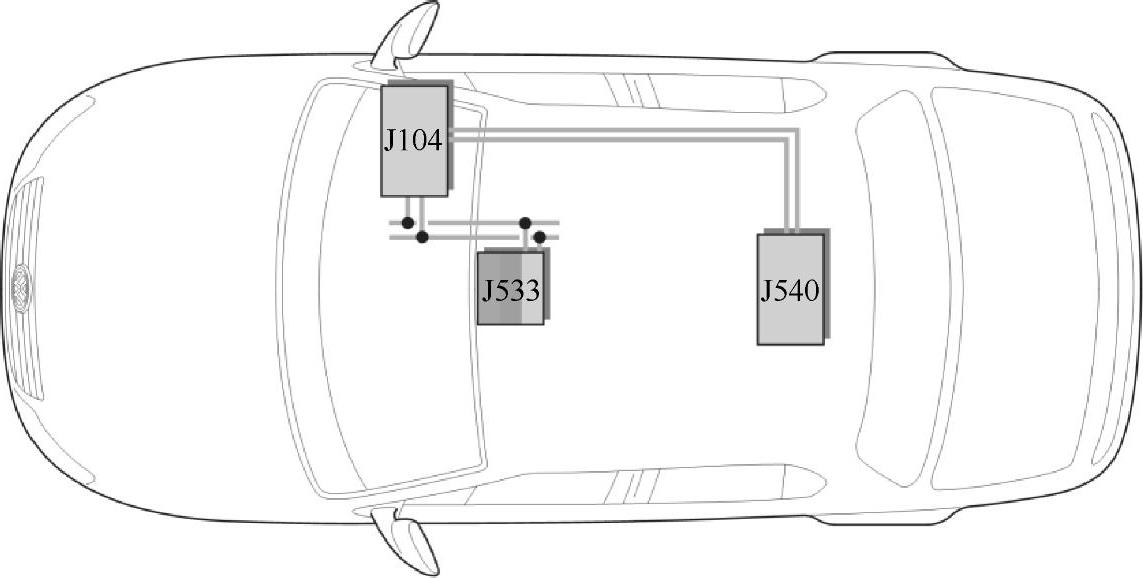
图7-42 电动驻车制动器CAN数据总线控制单元拓扑结构图
J104—ABS控制单元 J533—数据总线诊断接口 J540—电动驻车制动器控制单元(www.daowen.com)
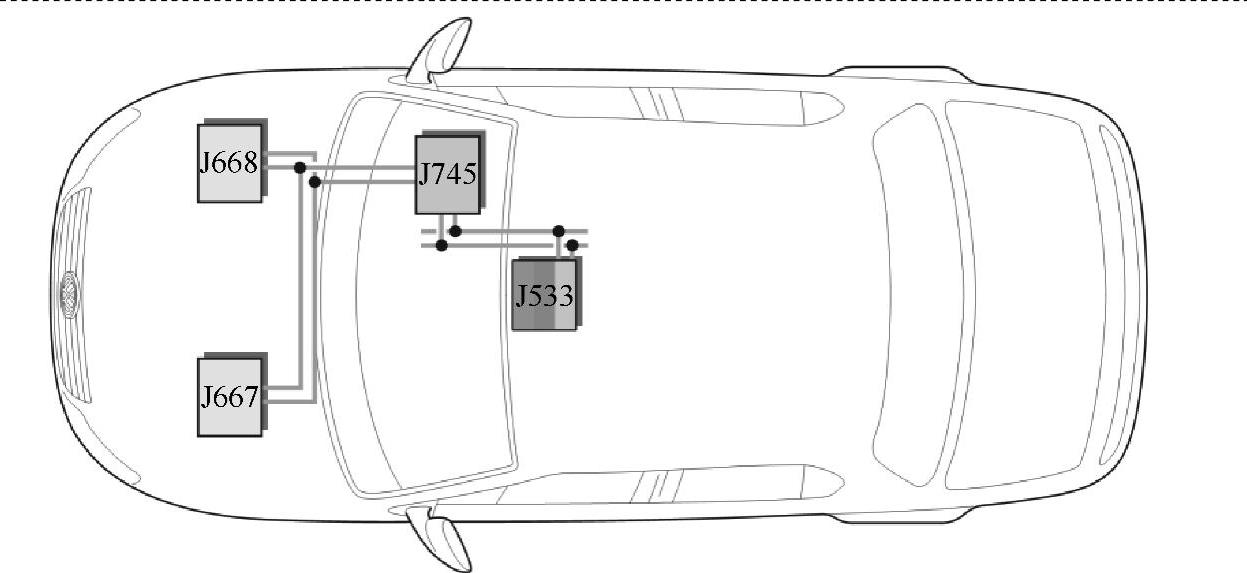
图7-43 转向灯CAN数据总线中的控制单元拓扑结构图
J533—数据总线诊断接口 J667—左侧前照灯功率模块 J668—右侧前照灯功率模块 J745—转向灯和前照灯照明距离调节控制单元
4.传感器CAN数据总线
传感器CAN数据总线的数据传输类似于转向灯CAN数据总线的数据传输,并且在发动机控制单元和NOx传感器控制单元之间传输数据,其拓扑结构图如图7-44所示。
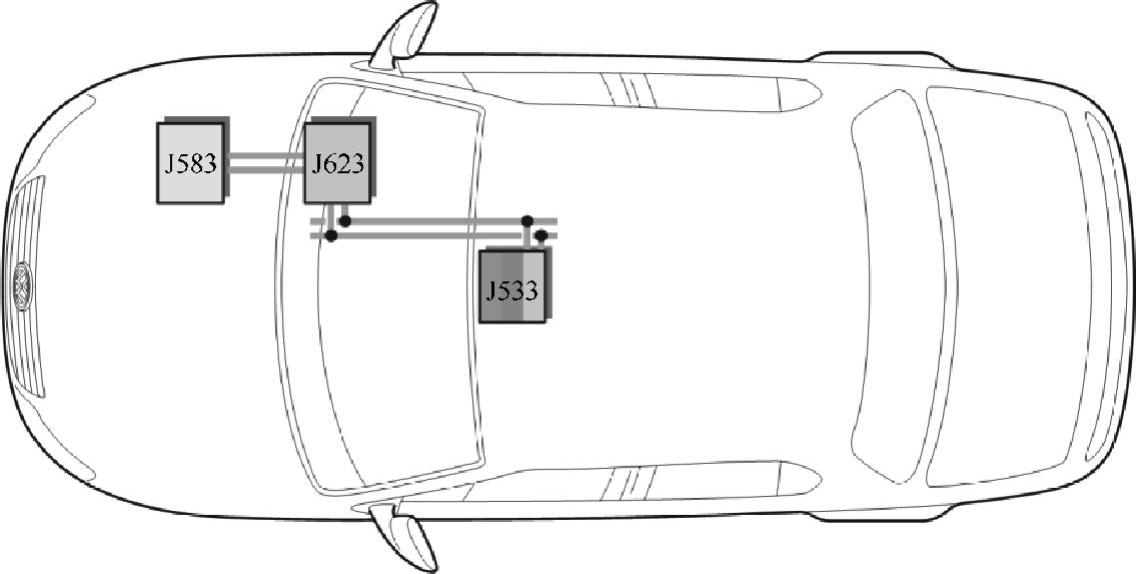
图7-44 传感器CAN数据总线拓扑结构图
J533—数据总线诊断接口 J583—NOx传感器控制单元 J623—发动机控制单元
5.串行数据总线
串行数据总线通过一个9800kbit/s的单线连接在ELV控制单元和舒适系统中央控制单元之间传输数据,如图7-45所示。与使用LIN数据总线系统相比,使用串行数据总线系统提高了防盗保护性能。
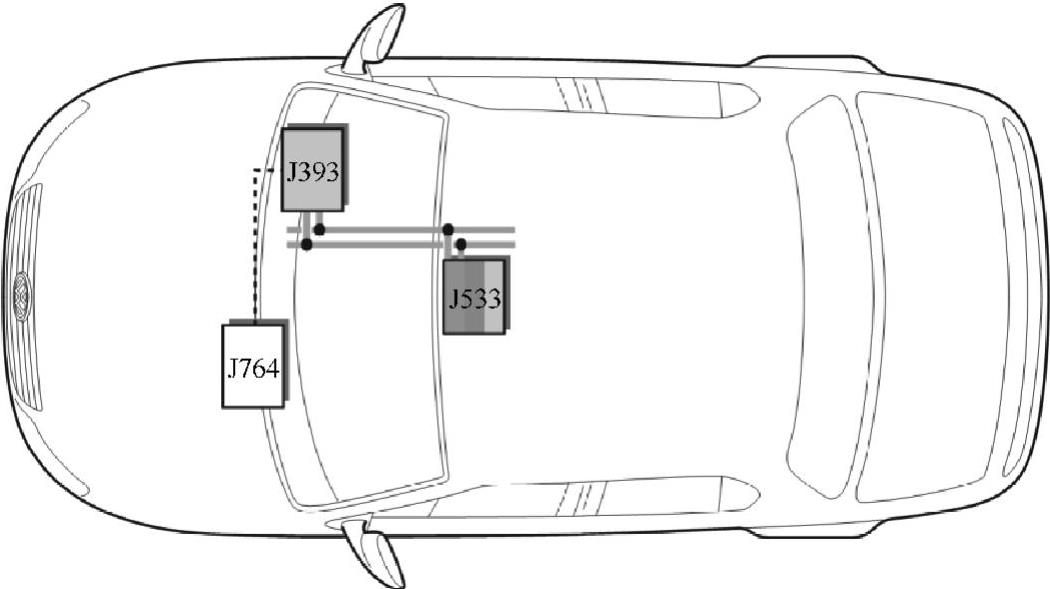
图7-45 串行数据总线拓扑结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






