CAN(ISO 11898)通信系统采用一对通信导线(双绞线)传输多条信息或数据,这些数据信息通过通信电路已经转变为数字信号。同连接输入设备(传感器、开关等)、控制单元、输出设备(电动机等)的系统相比,该网络使用了较少的线束数量,电子控制系统也变得“苗条”。
CAN通信系统的电路如图6-3所示,两个通信导线(总线)即高CAN和低CAN,形成了一对导线。总线的水平由分差电压决定。系统将该电压转变为符合专用通信协议的数字信号,并以500kbit/s的速度传输出去。总线水平为显性或隐性。理论上CAN通信系统将显性水平定为“0”,而隐性水平为“1”。
1.CAN通信网络
CAN通信网络拓扑结构如图6-4所示。多个ECU连接到通信线路上,总线主线路安装了终端电阻(120Ω),可以由连接到网络的回线来决定差分电压,CAN控制部件的安装位置如图6-5所示。
2.CAN通信协议(通信规则)
CAN通信系统是时间分割多路双向通信系统,可使网络内的所有ECU和传感器利用交错时间和一对通信线路(总线)来传输数据。因此,ECU和传感器根据普通的通信协议进行
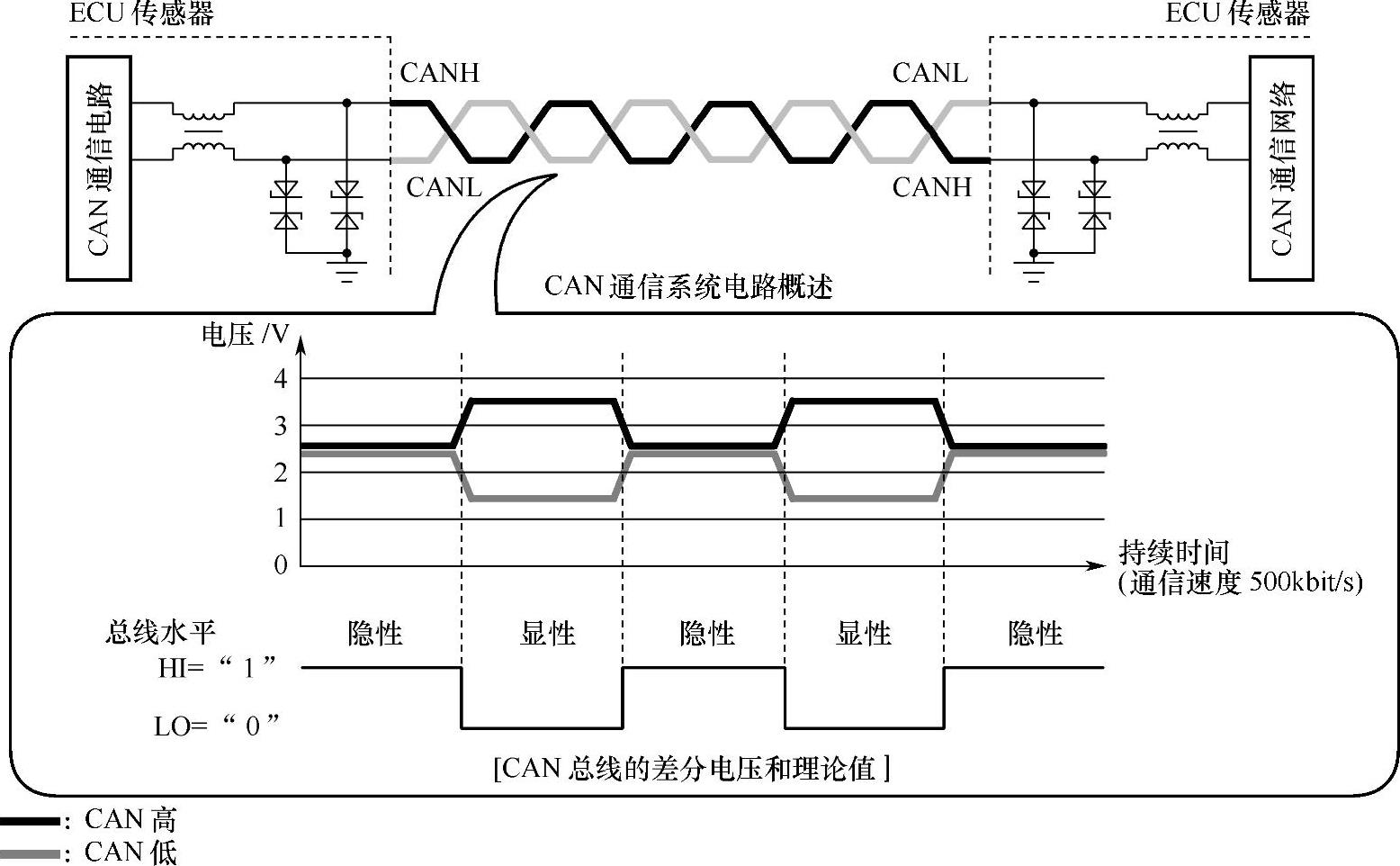
图6-3 CAN通信系统的电路(www.daowen.com)
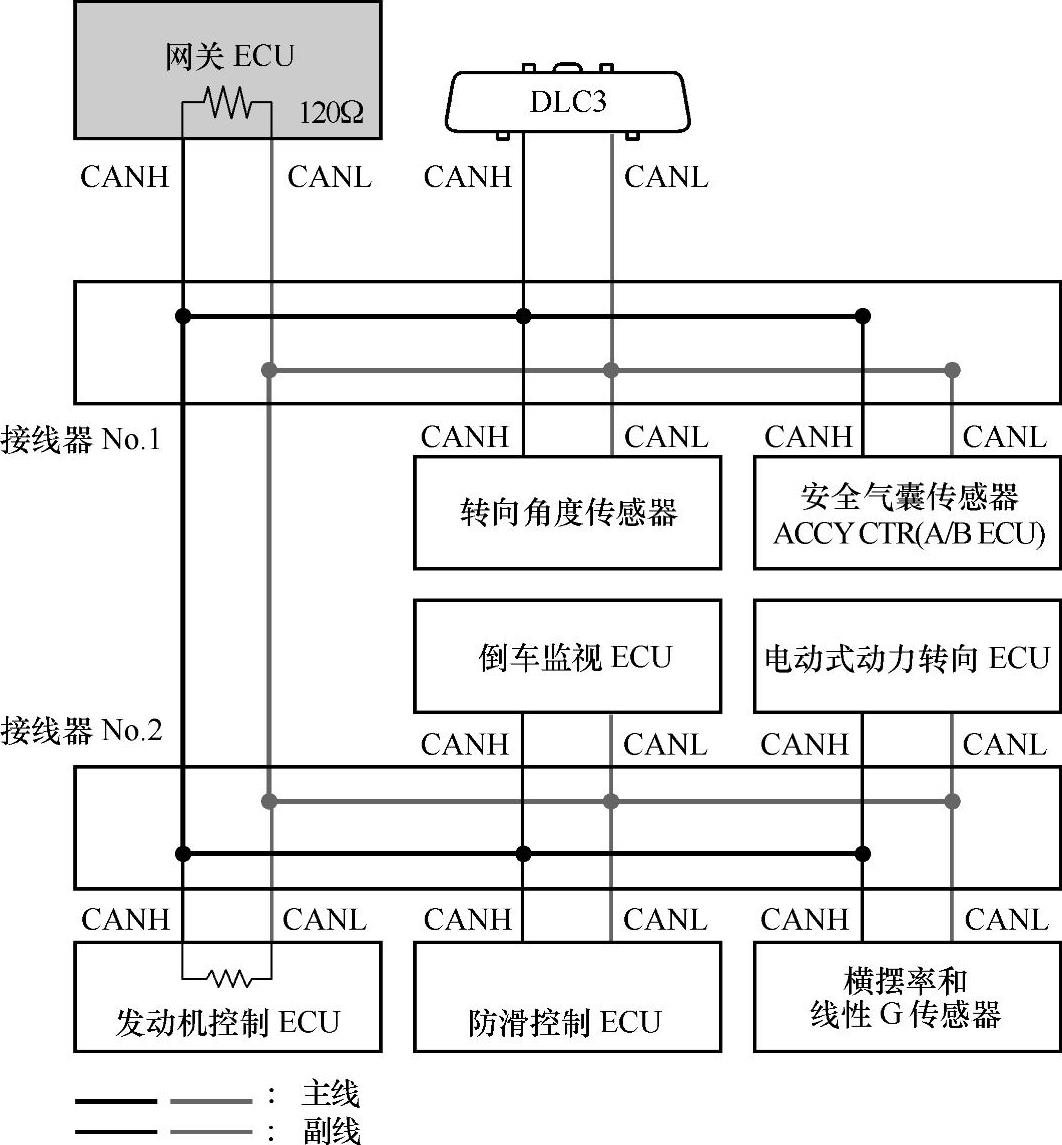
图6-4 CAN通信网络拓扑结构
操作,保证了平稳可靠的通信。CAN通信采用CSMA/CD(载波监听多路访问/冲突防止)通信协议,该协议使所有的ECU和传感器在有权开始传输数据的同时,共享一对通信线路。
当CAN总线上没有其他数据时,每一个ECU或传感器开始传输数据,数据帧的结构如图6-6所示。如果两个或者更多的ECU或传感器同时开始传输数据,则该系统根据相应的传输数据上的ID信息决定传输的先后顺序。CAN通信系统使用的数据段构成单独帧,每一个帧包含以下内容:ID、DLC、DATA、CRC和ACK。
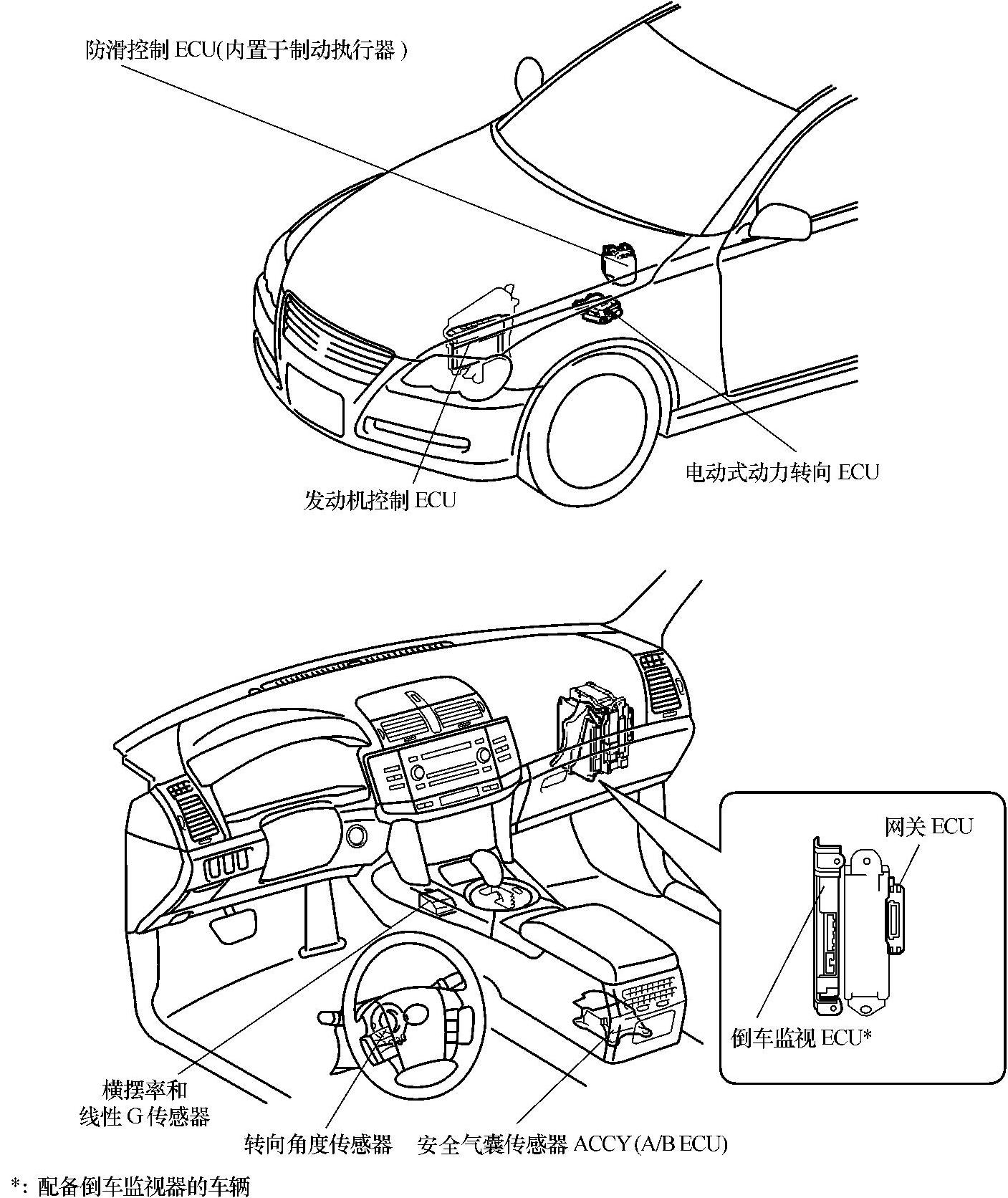
图6-5 CAN控制部件的安装位置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






