下面介绍FlexRay总线系统的拓扑结构、冗余数据传输、信号特性、确定性数据传输、唤醒和休眠特性、同步化等重要特性。
1.FlexRay总线系统的拓扑结构
FlexRay总线系统可以不同的拓扑结构和形式安装在车内,既可以采用线形总线拓扑结构,也可以采用星形总线拓扑结构,还可以采用混合总线拓扑结构。
(1)线形总线拓扑结构 在线形总线拓扑结构(图5-5)中,所有控制单元(例如SG1至SG3)都通过一个双线总线连接。该总线采用两个铜芯双绞线,CAN总线也使用这种连接方式。线形拓扑结构在两根导线上传输相同的信息,但电平不同。线形拓扑结构所传输的差动(差分)信号不易受到干扰,仅适用于电气数据传输。
(2)星形总线拓扑结构 在星形总线拓扑结构(图5-6)中,卫星式控制单元(控制单元SG2至SG5)分别通过一个独立的导线与中央主控控制单元(SG1)连接。这种星形拓扑结构既适合于电气数据传输,也适合于光学数据传输。
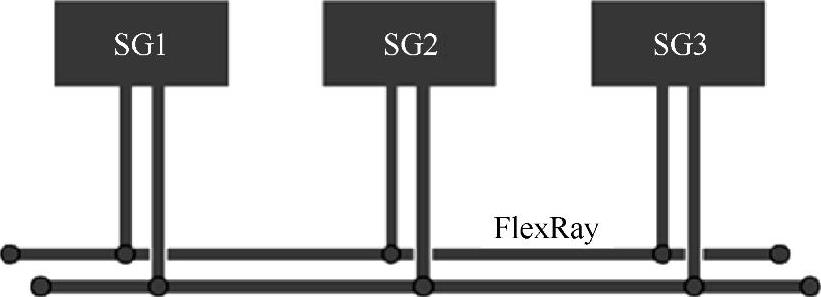
图5-5 线形总线拓扑结构
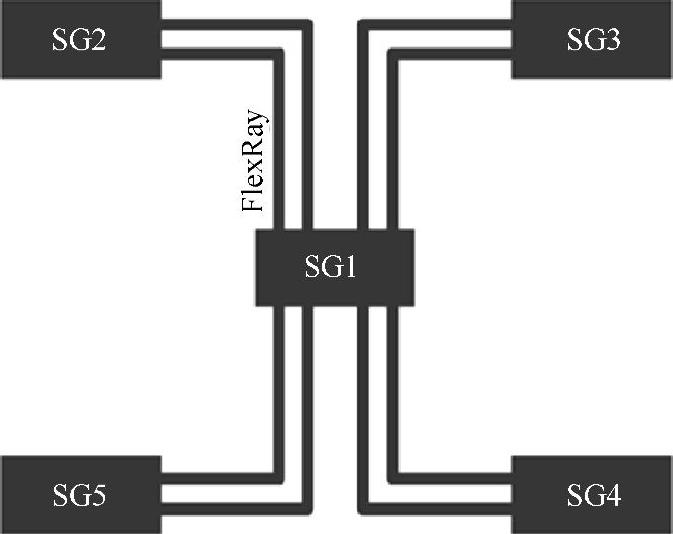
图5-6 星形总线拓扑结构
(3)混合总线拓扑结构 在混合总线拓扑结构中,在同一个总线系统内可以使用不同的拓扑结构。总线系统的一部分采用线形结构,另一部分为星形结构。F01/F02车型中使用的就是混合总线拓扑结构。根据车辆配置情况,在中央网关模块内带有一个或两个星形连接器,每个星形连接器都有4个总线驱动器。因此,最多可提供8个接口。
2.冗余数据传输
在容错性系统中,即使某一总线导线断路,也必须确保数据能继续可靠传输。这一要求可以通过在第二个数据信道上进行冗余数据传输(图5-7)来实现。具有冗余数据传输能力的总线系统使用两个相互独立的信道。每个信道都由一组双线导线组成。一个信道失灵时,该信道应传输的信息可在另外一条没有发生故障的信道上传输。
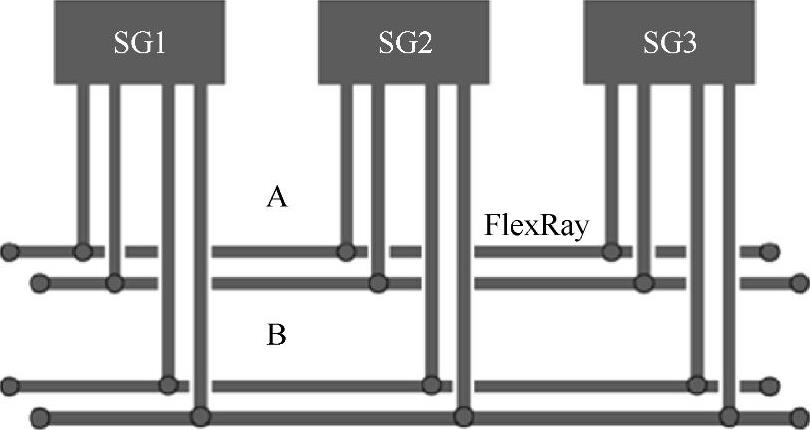
图5-7 冗余数据传输
A—信道1 B—信道2
3.信号特性
FlexRay总线信号必须在规定范围内。图5-8和图5-9给出了总线信号的正常波形和非正常波形。无论是在时间轴上还是在电压轴上,总线信号都不应进入内部区域。
FlexRay总线系统是数据传输速率较高且电平变化较快的一种总线系统,对电平高低以及电压上升沿和下降沿的斜率都有严格的规定,必须达到规定数值,且信号波形不得进入所标记的区域(绿色或红色六边形)。因导线安装不正确、接触电阻等产生的电气故障可能会导致数据传输出现问题。图5-8和图5-9所示波形只能用速度很快的实验室研究用的专业示波器显示出来,BMW车系诊断系统中使用的示波器不适合显示这种波形。
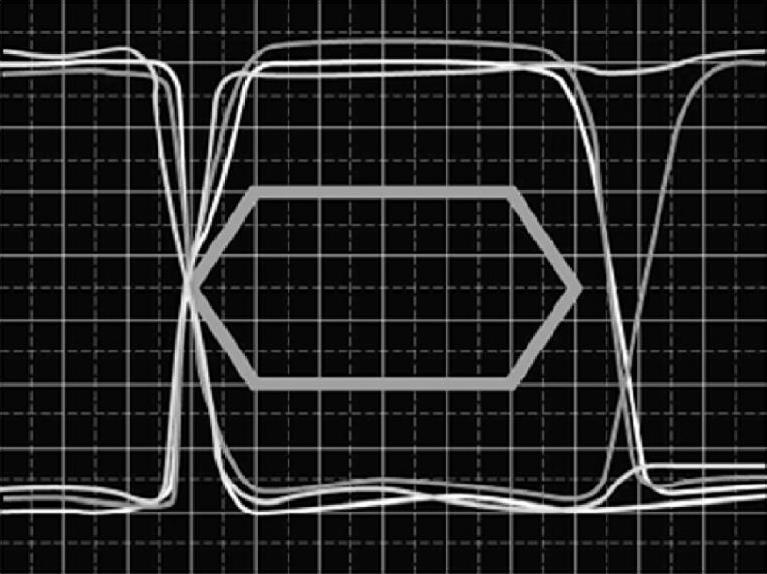
图5-8 正常波形
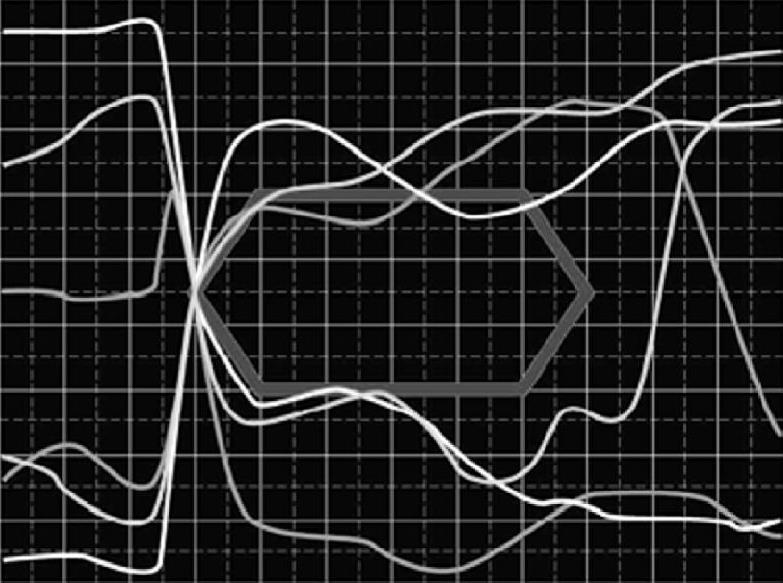
图5-9 非正常波形
FlexRay总线系统的电压范围如下:
1)系统接通。系统接通时,如果无总线通信,则其电压为2.5V。
2)高电平信号。高电平信号的电压为3.1V(电压信号上升600mV)。(https://www.daowen.com)
3)低电平信号。低电平信号的电压为1.9V(电压信号下降600mV)。
注:电压值以对地(搭铁)测量方式得到。
4.确定性数据传输
CAN网络是一个事件触发式总线系统,发生一个事件时就会传输数据。多个事件汇集在一起时,可能在后续信息发送时出现延迟现象。如果无法成功准确地传输一条信息,该信息将一直发送,直至相应通信设备确认已接收到。如果CAN总线系统内出现故障,可能会导致这些事件触发的信息汇集在一起并造成总线系统过载,即各信号的传输要延迟很长时间,这样会导致各系统的控制性能变差。
FlexRay是一种时间触发式总线系统,它也可以通过事件触发方式进行部分数据传输。在时间控制区域内,时隙分配给确定的信息。一个时隙是指一个规定的时间段,该时间段对特定信息(例如转速)开放。这样,在FlexRay总线系统内重要的周期性信息以固定的时间间隔传输,因此不会造成FlexRay总线过载。对时间要求不高的其他信息则在事件控制区域内传输。FlexRay总线系统内确定性数据的传输过程如图5-10所示。
确定性数据传输用于确保时间触发区域内的每条信息都能实现实时传输,即每条信息都能在规定时间内进行传输。因此,FlexRay不会由于总线系统过载而导致重要总线信息发送延迟。如果由于暂时性总线故障(例如EMC故障)导致一条信息丢失,则该信息不会再次发送,在为此规定的下一时隙内将发送当前数值。
5.唤醒和休眠特性
在BMW车系F01车型中,虽然可通过总线信号唤醒FlexRay控制单元,但大部分FlexRay控制单元由CAS(便捷登车及起动系统)通过一个附加唤醒导线进行唤醒。该唤醒导线的功能与以前BMW车系PT-CAN内的唤醒导线(15WUP)相同,其信号曲线也与PT-CAN的信号曲线一样。主动转向系统和VDM(垂直动态管理系统)不通过唤醒导线,而是通过总线信号唤醒。随后通过接通供电直接由VDM启用4个减振器卫星式控制单元。
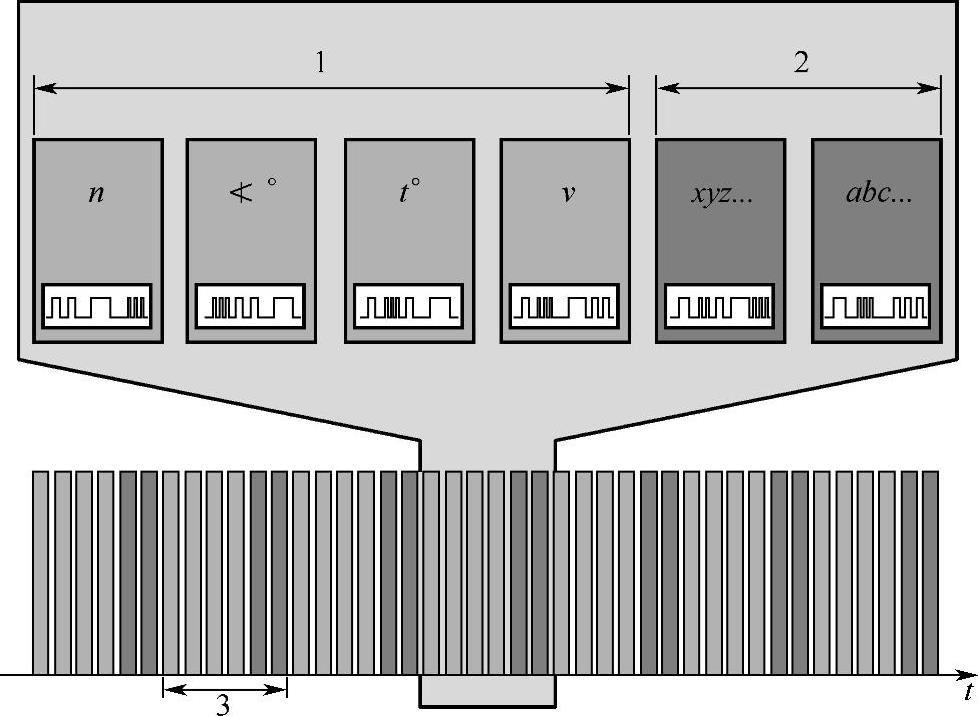
图5-10 FlexRay总线系统内确定性数据的传输过程
1—循环数据传输的时间触发区域 2—循环数据传输的事件触发区域 3—循环[总循环时间5ms,其中3ms为静态(时间触发),2ms为动态(事件触发)]
n—转速 ≮°—角度 t°—温度 v—车速 xyz...,abc...—事件触发的信息 t—时间
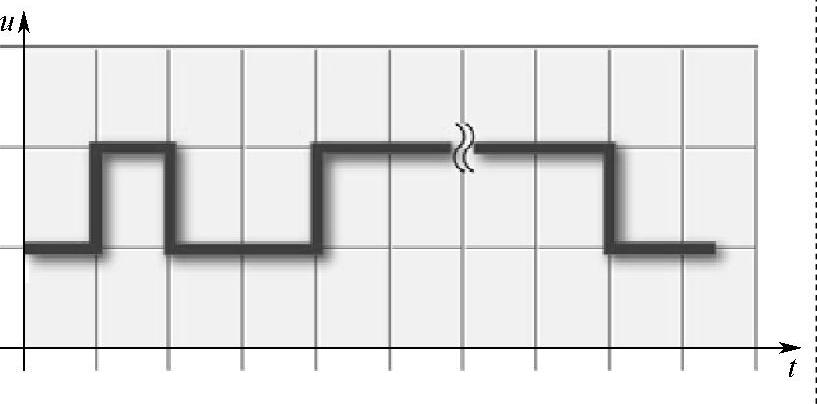
图5-11 FlexRay的唤醒信号曲线
FlexRay的唤醒信号曲线如图5-11所示,从中可以清楚地看出车辆开锁(打开车门锁)和起动时的典型的电压曲线。
第一阶段,驾驶人用车钥匙或遥控器将车辆开锁。CAS控制单元启用唤醒脉冲并通过唤醒导线将车辆开锁信号(高电平)传输给所连接的FlexRay控制单元。
第二阶段,驾驶人打开车门,进入车内。在将车钥匙插入点火开关之前,由于总线端R仍处于断开状态,总线系统内的信号电平再次下降(低电平)。
第三阶段,驾驶人起动发动机,总线端15接通,则总线系统内的信号电平保持在设定值(高电平),直至再次关闭总线端15。
第四阶段,驾驶人关闭发动机,拔出车钥匙,锁好车门。此时,总线端R再次处于断开状态。当总线端R处于断开状态时,FlexRay总线系统进入休眠模式,以免耗电过多。
为确保所有控制单元都进入休眠模式,FlexRay总线系统内的每个控制单元都自动注销。如果有某些控制单元未能进入休眠模式(可能会导致系统耗电过多),系统会自动存储一条故障信息。当对车辆进行电能(能量)诊断工作时将评估这条故障信息。
6.同步化
为了能够在联网控制单元内同步执行各项功能,需要有一个共同的时基。由于在所有控制单元内部都是利用其自身的时钟脉冲发生器工作的,因此,必须通过总线进行时间匹配。控制单元测量某些同步位的持续时间,据此计算平均值并根据这个数值调整总线时钟脉冲。同步位在总线信息的静态部分中发送。系统启动后,只要CAS控制单元发送一个唤醒脉冲,FlexRay上的两个授权唤醒控制单元(图5-2中带有“S”标记的控制单元)之间就会开始进行同步化。该过程结束时,其余控制单元相继自动在FlexRay上注册,计算出各自的差值并进行校正。
此外,在运行期间还会对同步化进行计算校正。这样可以确保最小的时间差,从而在较长时间内不会导致传输错误。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




