CAN数据总线系统由电控单元(ECU)、传输介质双绞线和终端电阻组成,如图2-2所示。
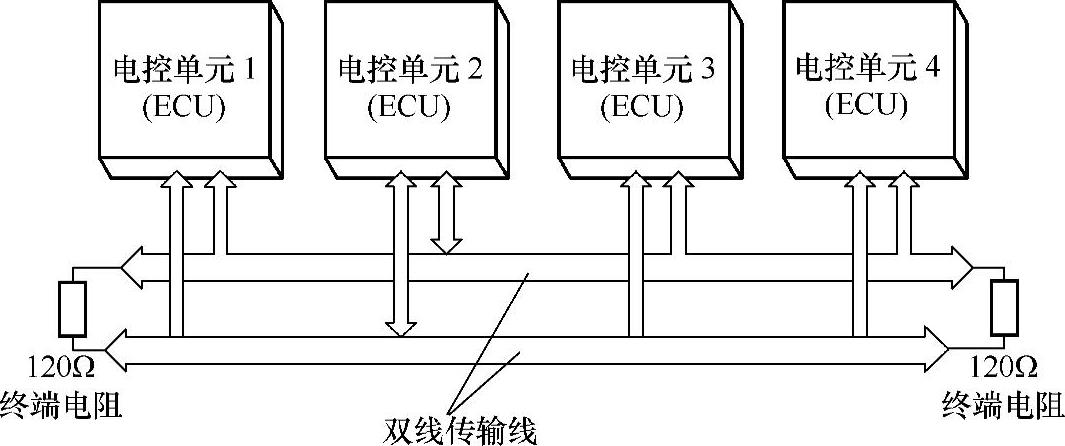
图2-2 CAN总线系统的组成
1.电控单元(ECU)
CAN总线连接的电控单元(ECU)又称CAN总线上的节点。理论上CAN总线可以连接无穷多个节点,实际上受线路越长、传输速率越低的限制,车载CAN总线的节点数可达上百个。
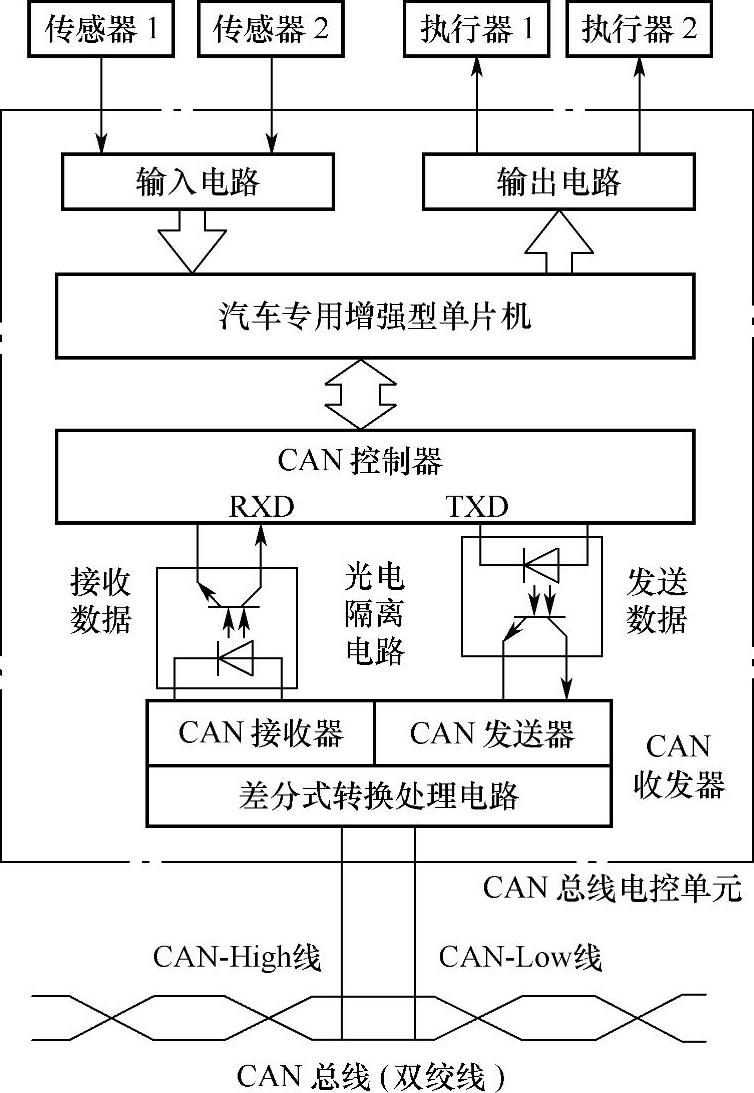
图2-3 CAN总线电控单元的原理图
CAN总线上的每个电控单元(ECU)独立完成网络数据交换和测控任务,如发动机电控单元(ECU)、自动变速器电控单元(ECU)、ABS电控单元(ECU)等。CAN总线上的电控单元(ECU)与非网络电控单元(ECU)不同,非网络电控单元(ECU)不需要对外进行数据交换;而网络上的电控单元(ECU)之间需要数据交换,例如发动机电控单元(ECU)中的发动机转速数据除了控制发动机的工况需要外,还需要经CAN总线传输给自动变速器电控单元(ECU),供自动变速器自动换档控制使用;反过来,自动变速器的换档信号也要经CAN总线传输给电控单元(ECU),使发动机的工况适合自动变速器的换档要求。
图2-3所示为CAN总线电控单元的原理图,CAN总线电控单元由输入电路、输出电路、单片机、CAN控制器、光电隔离电路、CAN收发器组成,分述如下:
(1)输入电路 输入电路用来接收来自传感器和控制开关的输入信号,并将输入信号转换为单片机可接收的数字信号。如果输入信号是模拟信号,那么输入电路里还含有模/数转换电路(A/D转换),将模拟信号转为数字信号。如冷却液温度传感器的信号是模拟信号,需经A/D转换电路转换为数字信号。
(2)输出电路 输出电路将单片机输出的控制信号转换成能驱动执行器的功率信号,因此输出电路包括放大驱动电路。因为大部分执行器是模拟执行器,所以首先要将单片机输出的数字信号经数/模转换电路(D/A转换)转换为模拟信号。
(3)单片机 单片机在工业控制技术中也常称为微控制器。目前,汽车电控单元使用的单片机是汽车专用增强型单片机,是针对汽车较为复杂的振动、高温、低温和恶劣的电磁环境而设计的。有的汽车单片机芯片内已包含A/D转换、D/A转换和其他专用电路,有的甚至将CAN控制器也合成在一起。
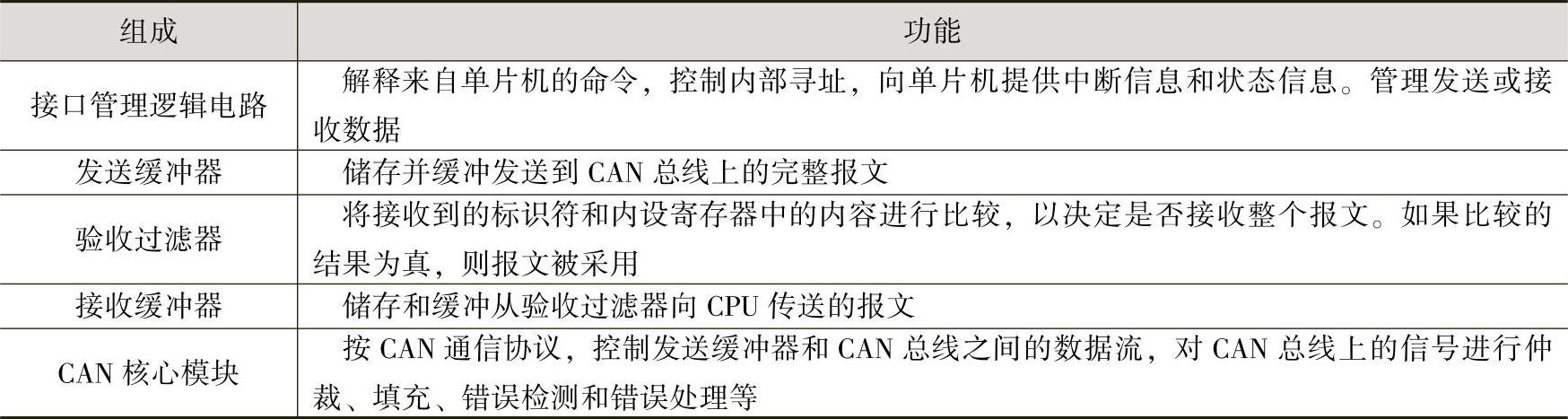
(4)CAN控制器 独立的CAN控制器是基于单片机控制的、专用于执行CAN总线通信协议的独立数字集成电路芯片。也有将单片机与CAN控制器合成的芯片,也称为CAN控制器。图2-4所示为一独立的CAN控制器的原理图。CAN控制器的各部分组成及功能见表2-3。
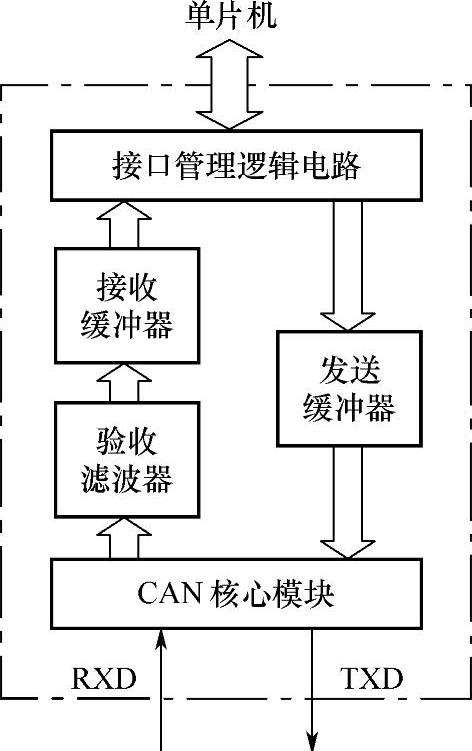
图2-4 CAN控制器的原理图
表2-3 CAN控制器的各部分组成及功能
(5)光电隔离电路 以光为媒介传送信号,对输入和输出电路进行电气隔离,因而能有效地抑制系统噪声,消除接地回路的干扰,有响应速度较快、寿命长、体积小、耐冲击等优点。(https://www.daowen.com)
(6)CAN收发器 由CAN接收器、CAN发送器和差分转换处理电路组成。图2-5所示为CAN收发器转换信号的示意图。
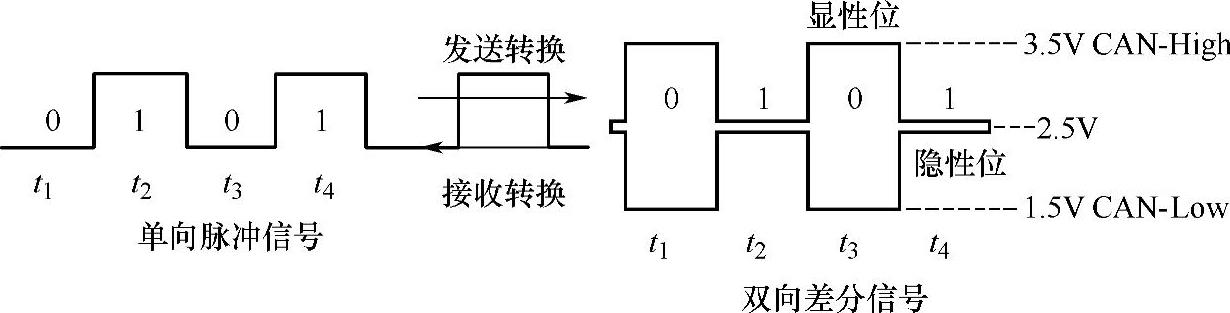
图2-5 CAN收发器转换信号的示意图
单片机的数据信号为正逻辑信号,经CAN发送器中的差分放大器转换为双向的差分信号传送到总线上。差分信号以负逻辑信号形式表示数据。
以高速CAN总线为例,当单向脉冲信号为“0”,并且代表逻辑“0”时,差分信号的高电平信号用CAN-High表示,电压为3.5V;低电平信号用CAN-Low表示,电压为1.5V;差分电压为2V,此时总线的状态为“显性位”,“显性位”代表逻辑“0”。当单向脉冲信号为“1”时,并且代表逻辑“1”时,差分信号的高电平信号和低电平信号均为2.5V;差分电压为0V,此时总线的状态为“隐性位”,“隐性位”代表逻辑“1”。
CAN-High信号和CAN-Low信号分别输出到CAN总线上,即双绞线上。接高电平信号的线对应称为CAN-High线,接低电平信号的线对应称为CAN-Low线。
CAN接收器是差分式接收放大器,可将CAN总线上双向的差分信号转变为单向的脉冲信号。CAN收发器在不发送信号时就处于接收状态。
CAN总线在任意时刻只能处于一种状态,要么是“隐性位”,要么是“显性位”。图2-6所示是用示波器在CAN总线测得的电压波形。
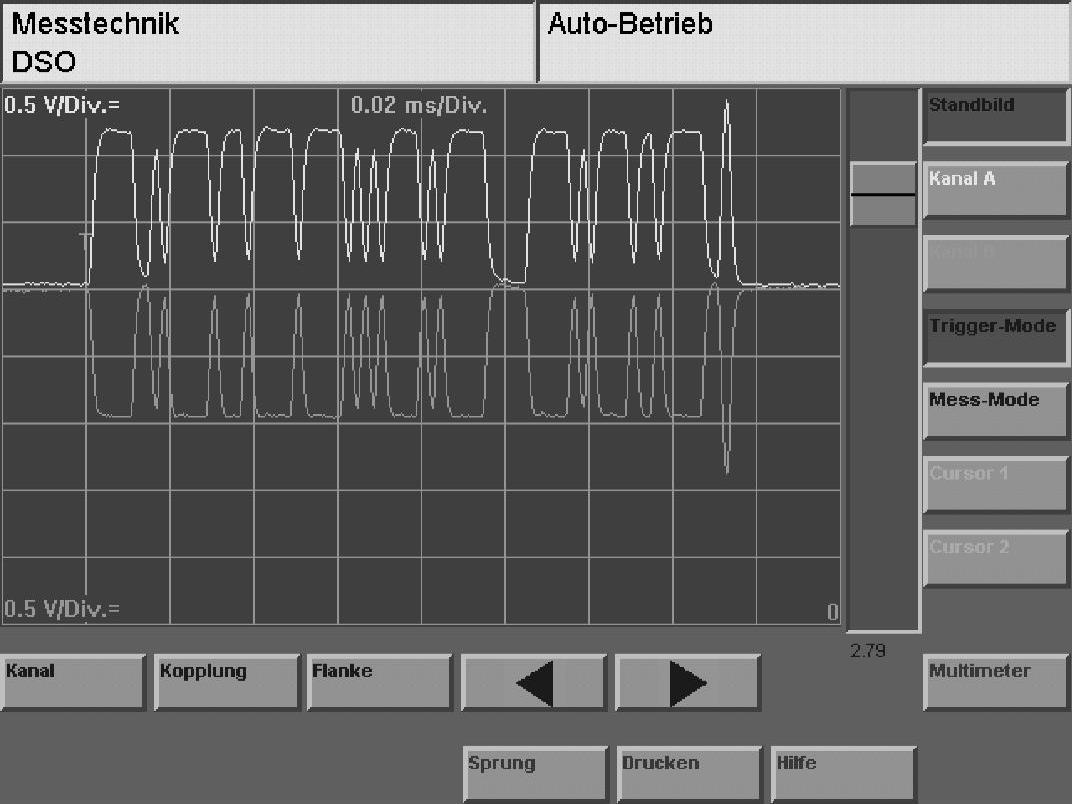
图2-6 用示波器在CAN总线测得的电压波形
2.CAN数据传输线
汽车上CAN数据传输线大都是双绞线,分为CAN高电平数据线和低电平数据线,即CAN-High线和CAN-Low线。这种结构使系统能够同时读写总线。数据使用差分电压传送,差分的电压使CAN数据总线系统即使在一条数据线断开或者在噪声极大的环境中也能够工作。车辆在使用过程中,电火花、电磁线圈开关、移动电话和发送站等发出的电磁波都会影响或破坏CAN的数据传送。为了防止数据在传送时受到干扰,两条数据传输线缠绕在一起,如图2-7所示,这样也可以防止数据线所产生的辐射噪声。这两条线的电位相反,如果一根数据线上的电压约为0V,那么另一根线上的电压就约为5V,这样,两根线的总电压保持为一个常数,而且所产生的电磁效应也会由于极性相反而互相抵消,使向外辐射保持中性(即无辐射)。
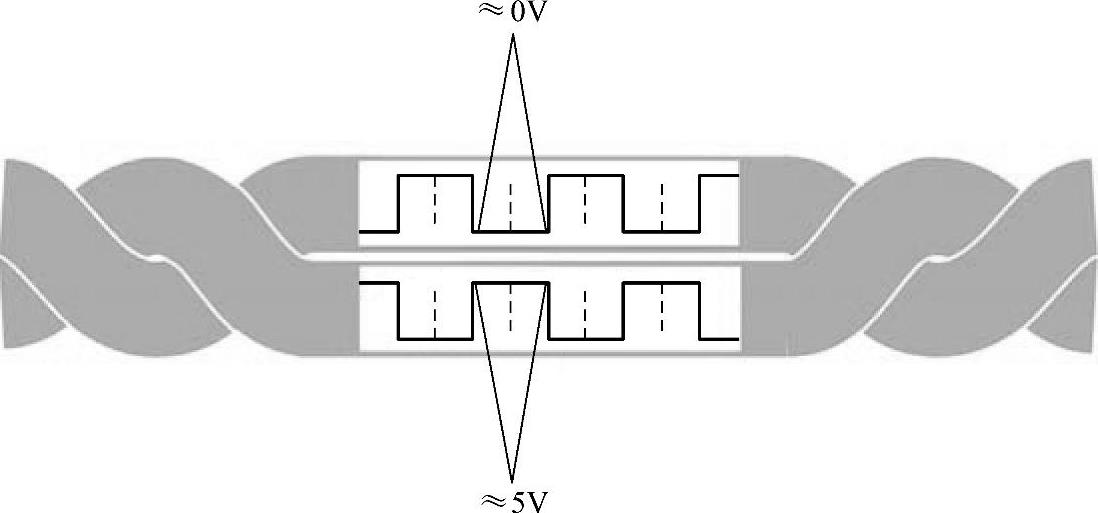
图2-7 缠绕在一起的双绞线
3.CAN终端电阻
CAN两端都接一个120Ω的电阻器,即连接在双绞线的两端,终端电阻可防止信号在传输线终端被反射并以回波的形式返回,影响数据的正确传送。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





