1.线束的变化
传统的汽车中,各种电子电器设备之间用导线、插接件连接。从发动机控制到传动系统控制,从行驶、制动、转向系统控制,到安全保证系统和仪表报警系统,从电源管理到舒适系统,每种功能的控制操作都集中在驾驶室进行,各个系统都必须用导线和插接件连接到驾驶室的操控台。随着汽车动力驱动系统、舒适系统和信息娱乐系统内各种电子控制系统的不断增加,这些连接所需要的导线和插接件的数量随之急剧增加,从而引发了汽车厂商和设计人员的思考。图1-1列出了近几十年间导线长度及插接件数量的变化情况。
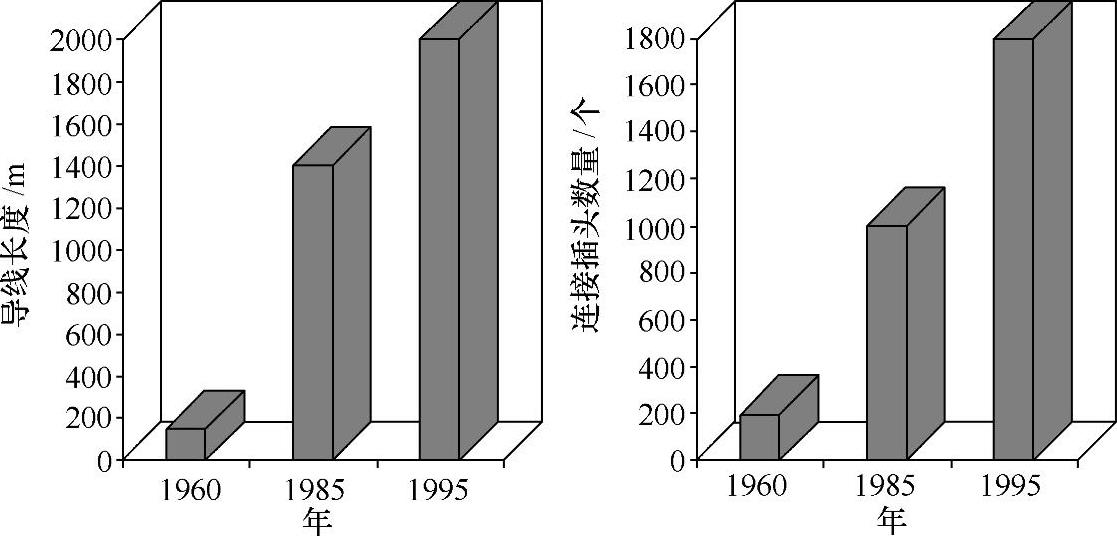
图1-1 近几十年间导线长度及插接件数量的变化情况
导线数量的增加造成的影响如下:
1)整个汽车的布线将十分复杂,显得很凌乱,一根线束包裹着几十根导线的现象很普遍。
2)占用空间更大,使得在有限的汽车空间内布线越来越困难,限制了功能的扩展。
3)故障率随之增加,降低了汽车的可靠性,另外,一般情况下线束都装在纵梁下等看不到的地方,一旦线束中出了问题,查找相当麻烦,增加了维修的难度。
4)电控单元并不是仅仅与负载设备简单地连接,更多的是与外围设备及其他电控单元进行信息交流,并经过复杂的控制运算,发出控制指令,按传统的连接方式,线束成本较高。
导线长度和插接件数量的增加不但占据车内的有效空间、增加装配和维修的难度、提高整车成本,而且妨碍整车可靠性的提高。这在无形中使汽车研发进入了这样一个怪圈:为了提高汽车的性能而增加汽车电器的数量,汽车电器数量的增加导致导线长度的增加,而导线长度的增加又妨碍了汽车可靠性的进一步提高。
为解决以上问题,车载网络(也称数据传输总线)应运而生,使得汽车电控系统发生了巨大的变化。至此,车载电控系统经历了中央电脑集中控制、多电脑分散控制和网络控制三个阶段,如图1-2所示。
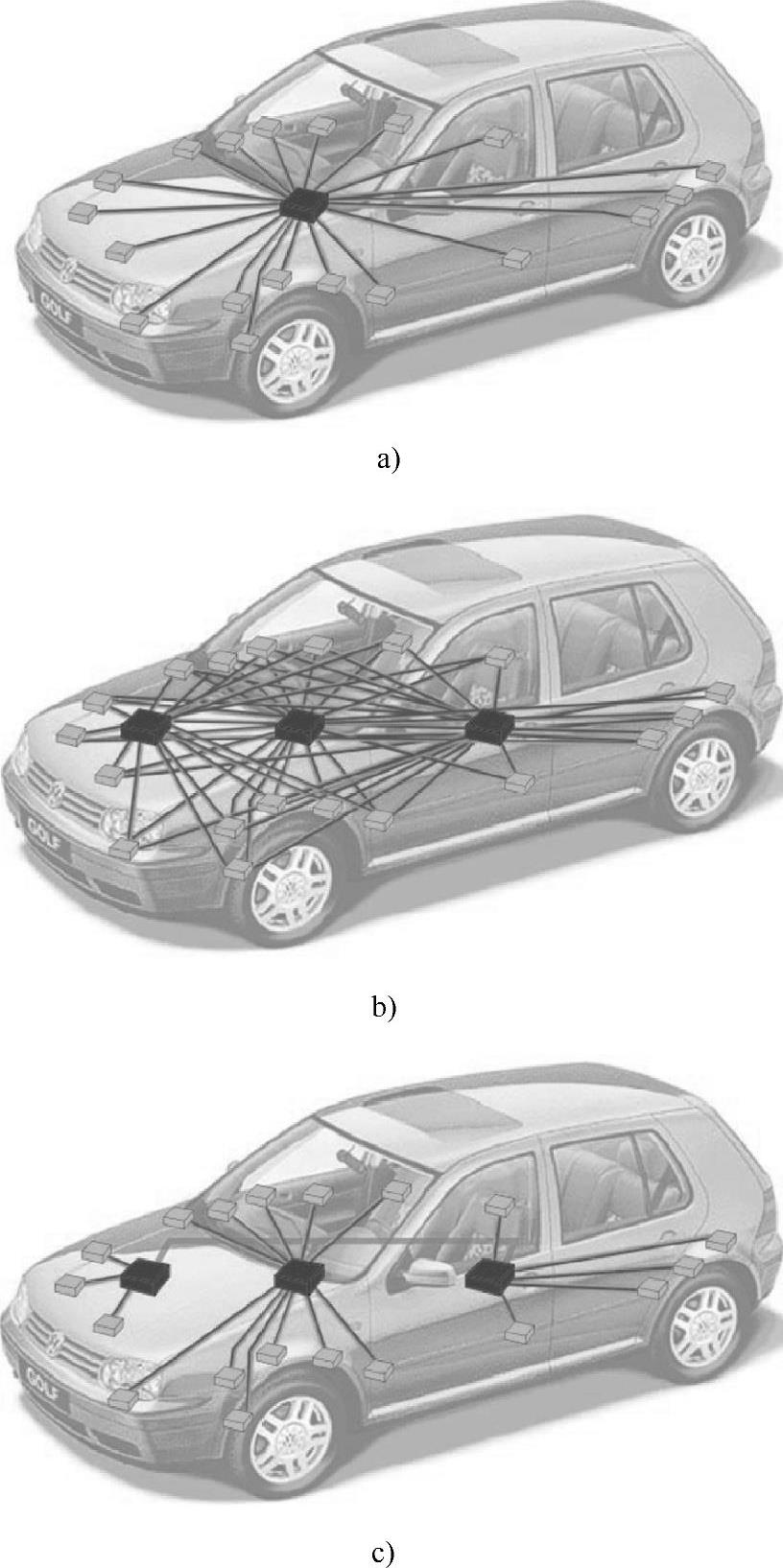
图1-2 汽车电控系统的发展
a)中央电脑集中控制 b)多电脑分散控制 c)网络控制
2.汽车数据传输总线简介
(1)数据传输总线 所谓数据传输总线,就是指在一条数据线上传递的信号可以被多个系统共享,从而最大限度地提高系统整体效率,充分利用有限的资源。例如,常见的电脑键盘有104键,可以发出一百多个不同的指令,但键盘与主机之间的数据连接线却只有7根,键盘正是依靠这7根数据连接线上不同的数字电压信号组合(编码信号)来传递按键信息的。如果把这种方式应用在汽车电气系统上,就可以大大简化汽车电路。可以通过不同的编码信号来表示不同的开关动作,信号解码后,根据指令接通或断开对应的用电设备。这样,就能将过去一线一用的专线制改为一线多用制,大大减少了汽车上电线的数目,缩小了线束的直径。同时,加速了汽车智能化的发展。
在汽车上传统的信息传递方式采用并行数据传输方式,每项信息需独立的数据线完成,即有几个信号就要有几条信号传输线。例如,宝来轿车发动机电控单元J220与自动变速器电控单元J217之间就需要5条信号传输线,如图1-3所示。如果传递的信号项目越多,则需要更多的信号传输线。采用传输总线后,只需要1根或2根传输线即可,如图1-4所示。而且实现更好地在各控制系统之间调整通信、交流信息、协调控制、共享资源,完成对汽车性能的精确控制。
如图1-4所示,在传统控制电路中,各种控制信号都属于平行关系,互相之间并没有关联,每个信号都有专属的信号线,因此,如果需要传输多个信号的话,就需要多根线进行。而在车载网络系统中采取基于串行数据总线体系结构,能将各种信号按照内部程序转换为各种数据后,通过1条线或2条线,每个比特的信息一个一个地被传输,进行串行通信,在其通信线上传送的是“0”“1”数字信号。如图1-5所示,A电脑读取4个开关信号状态,将其转换为“0110”的数据传送给B电脑,B电脑收到后将其解出,即知现在1、4开关断开,2、3开关接通。
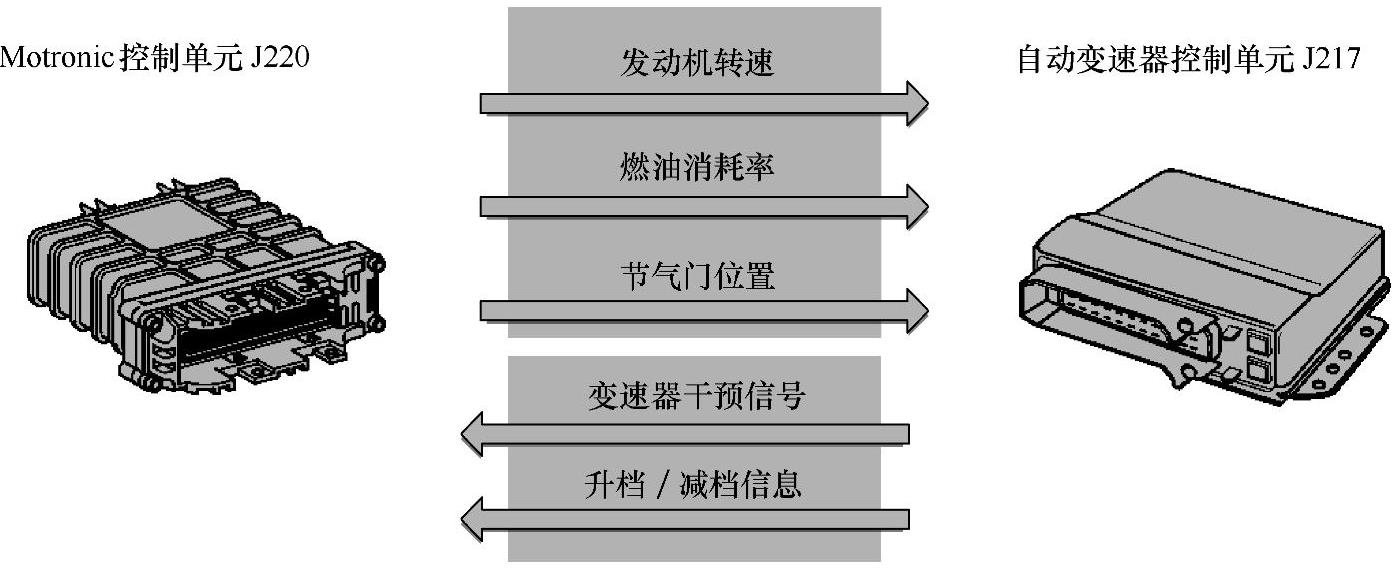
图1-3 传统信号传递方式
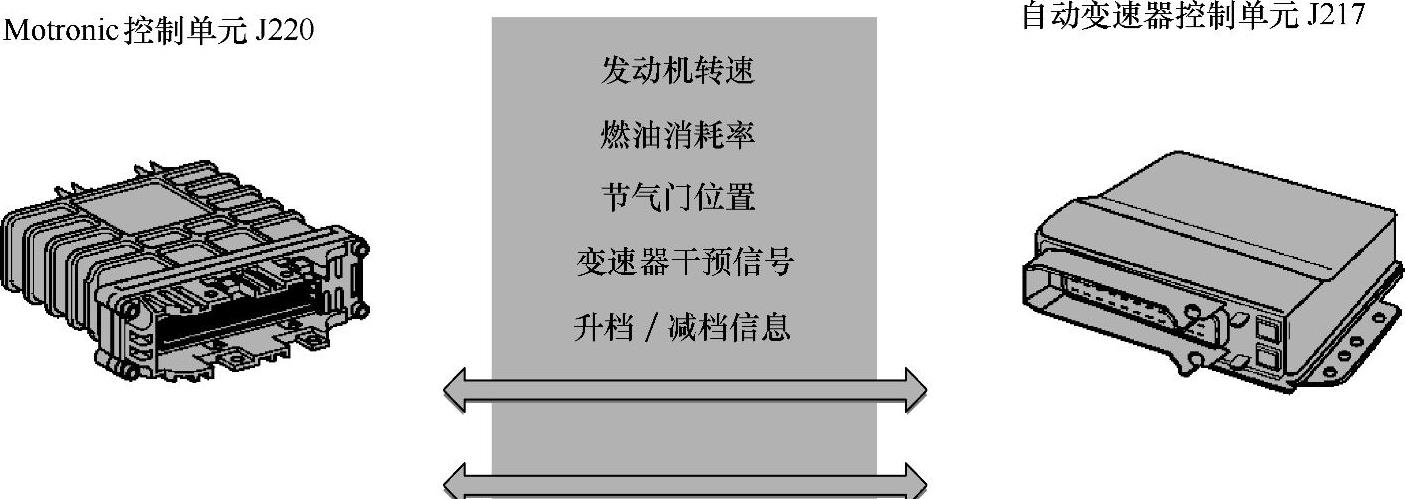
图1-4 数字总线信号传递方式
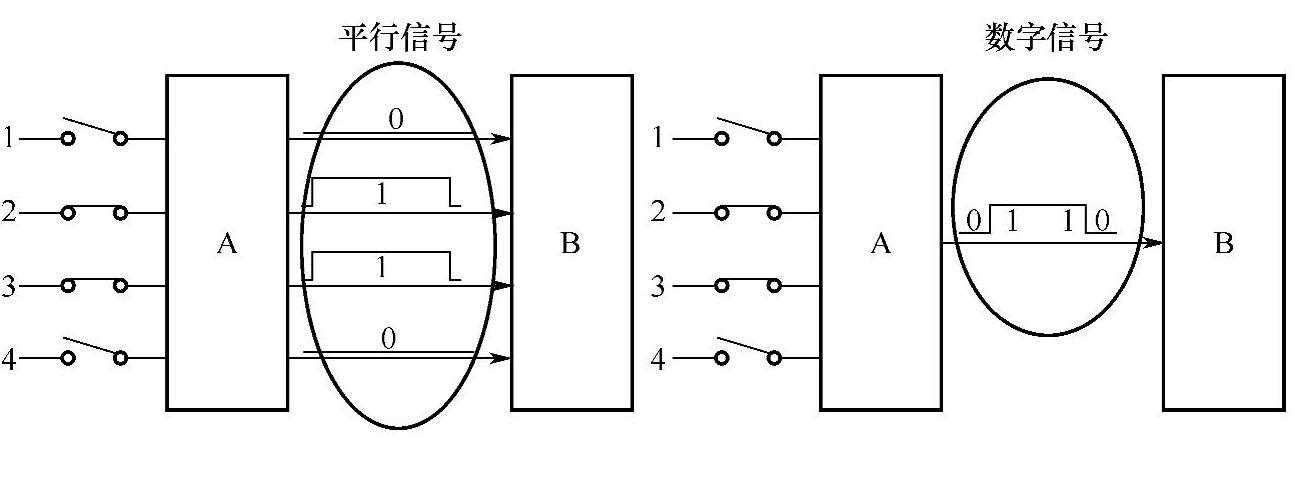
图1-5 两种不同信号
当数据中的字节有多位时,就能表达很多含义,在进行通信时就能通过多位数的不同“0”“1”组合变化来传送信息。如表1-1所示,用2位二进制数就可以表达4种意义,如此类推有n位二进制数即可以有2的n次方种数据类型。
表1-1 2位二进制数字代表的含意

(2)总线数据传输的要求 总线系统上并联有多个元件。这就要求整个系统满足以下要求。
1)可靠性高。传输故障(无论是由内部还是外部引起的)应能准确识别出来。(www.daowen.com)
2)使用方便。如果某一控制单元出现故障,其余系统应尽可能保持原有功能,以便进行信息交换。
3)数据密度大。所有控制单元在任一瞬时的信息状态均相同,这样就使得两个控制单元之间不会有数据偏差。如果系统的某一处有故障,那么总线上所有连接的元件都会得到通知。
4)数据传输快。连成网络的各元件之间的数据交换速率必须很快,这样才能满足实时要求。
(3)总线数据传输的优点 采用总线数据传输(多路传输)的优点主要表现在以下几个方面。
1)简化线束。减少重量,减少成本,减小尺寸,减少连接器的数量,如图1-6所示,同一款车同等配置下,可以看出采用车载网络可以大大简化汽车线束。
2)可以进行设备之间的通信,丰富了功能。
3)通过信息共享减少传感器信号的重复数量。
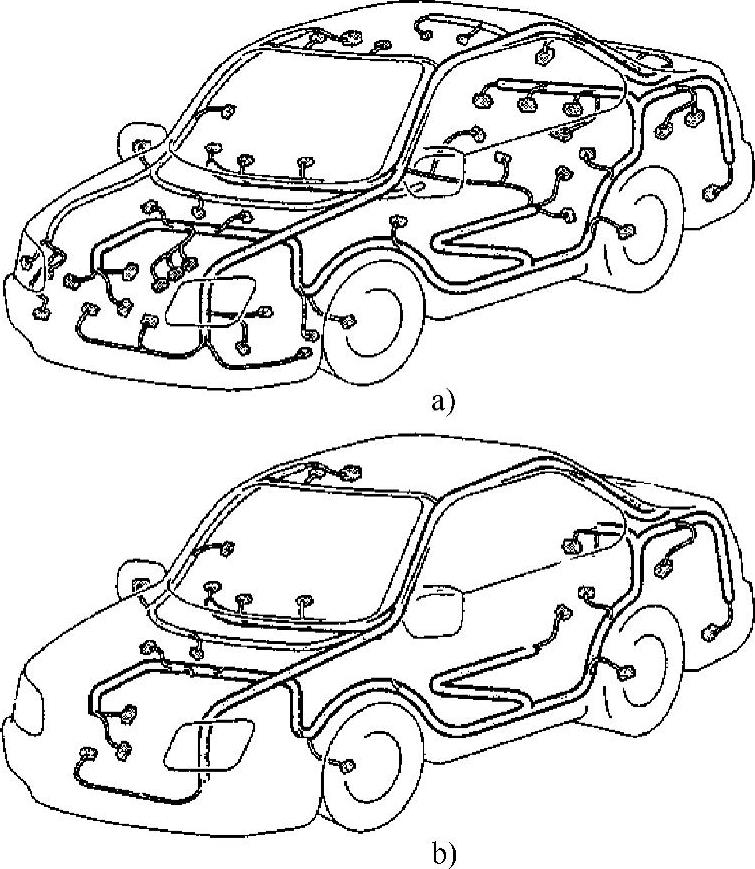
图1-6 线束对比
a)传统线束 b)采用车载网络后的线束
3.车载网络系统的发展史
从1980年起,汽车内开始装用网络,在1983年,丰田公司在世纪牌汽车上最早采用了应用光缆的车门控制系统,实现了多个节点的连接通信。此系统采用了集中控制方法,车身电控单元(ECU)对各车门的门锁、电动玻璃窗进行控制,这是早期在汽车上采用的光缆系统,此后,在较长的一段时间里,其他公司并没有跟进采用光缆系统。
1986年2月,Robert Bosch公司在美国汽车工程师协会(SAE)汽车工程协会大会上介绍了一种新型的串行总线——CAN控制器局域网,那是车载网络系统CAN诞生的时刻。CAN全称为Controller Area Network,即控制器局域网,是国际上应用最广泛的现场总线之一。
接着,美国汽车工程师协会提出了J1850。
此后,日本也提出了各种各样的网络方案,并且丰田、日产、三菱、本田及马自达公司都已经处于批量生产的阶段,但没有统一为以车身系统为主的控制方式。
而在其他国家,特别是欧洲的厂家则采用CAN,同时发表文章介绍采用大型CAN网络的车型。由于他们在控制系统上都可以采用CAN,从而充分地证明了CAN在此领域内的先进性。
在美国,通过采用SAE J1850普及了数据共享系统,在SAE中也通过了CAN的标准,明确地表示将转向CAN协议。
随着汽车技术的发展,欧洲又以与CAN协议不同的思路提出了控制系统的新协议TTP(Time Triggered Protocol),并在X-by-Wire系统上开始应用。对飞机的控制系统来说,有Fly by wire系统,直译为靠电线飞行的系统,实际上,它表示飞机的控制方式,即将飞行员的操纵、操作命令转换成电信号,利用计算机控制飞行的工作方式。将这种操作方式引入到汽车上,则出现了Drive-by-Wire系统,直译为靠电线行驶的系统,在汽车上类似的系统还有Steering-by-Wire系统、Brake-by-Wire系统,将这些系统统称为X-by-Wire系统。
与这些网络采用不同思路开发的有信息系统,在开关及显示功能控制用的信号系统的信息设备之间建立网络,下一步是利用显示数据自身用光缆进行转送数据。
为了实现音响系统的数字化,建立了将音频数据与信号系统综合在一起的AV网络,因为这种网络需要将大容量的数据连续地输出,因此,在这种网络上将采用光缆。
今后,当对汽车引入智能交通系统(ITS)时,由于要与车外交换数据,所以,在信息系统中将会采用更大容量的网络,例如D2B协议、MOST及IEEE1394等。
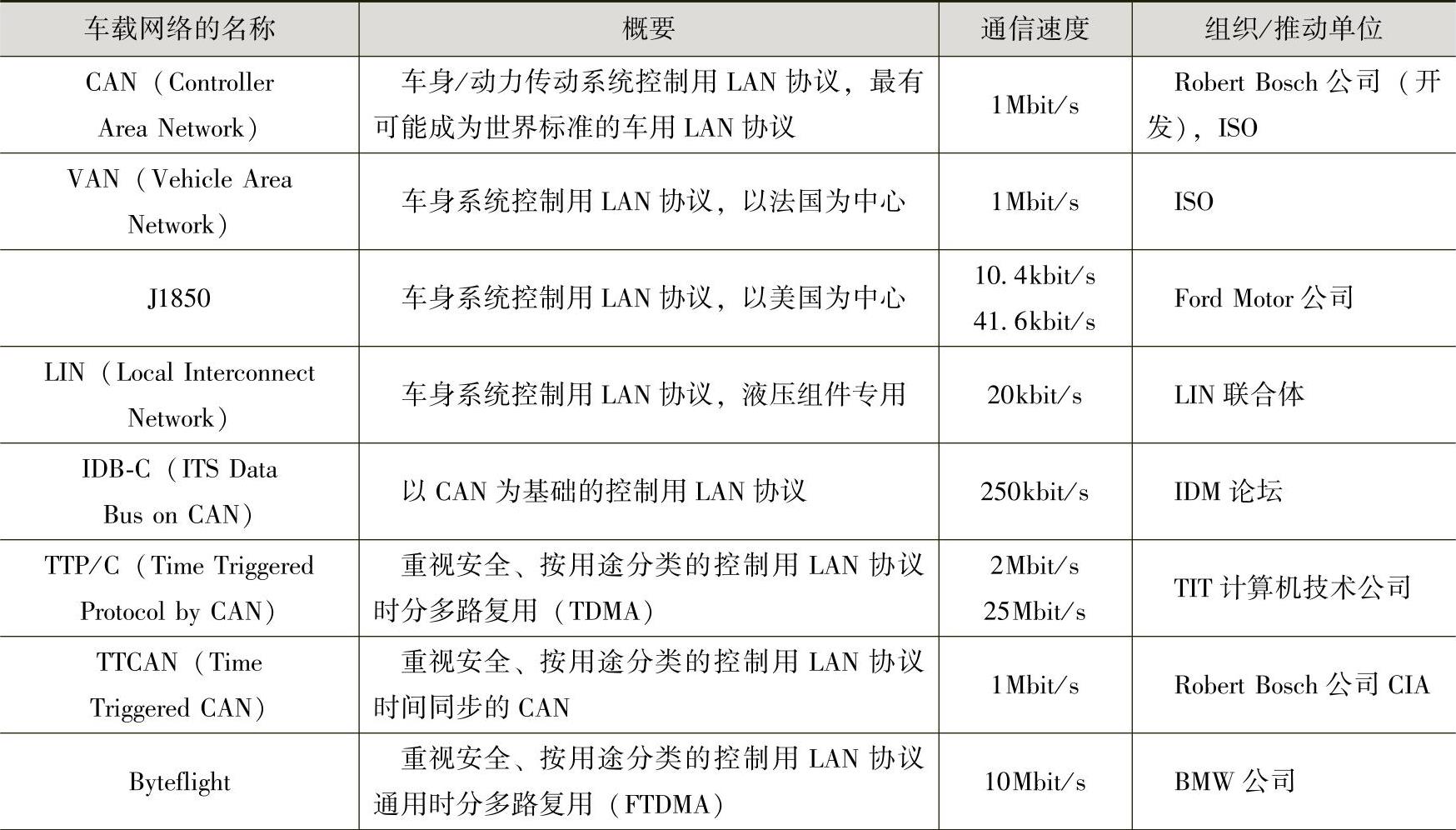
主要车载网络的基本情况见表1-2。几种车载网络的开发年份、采用厂家与发表年份见表1-3。几种网络的成本对比及通信速度如图1-7所示。表1-2 主要车载网络的基本情况
(续)
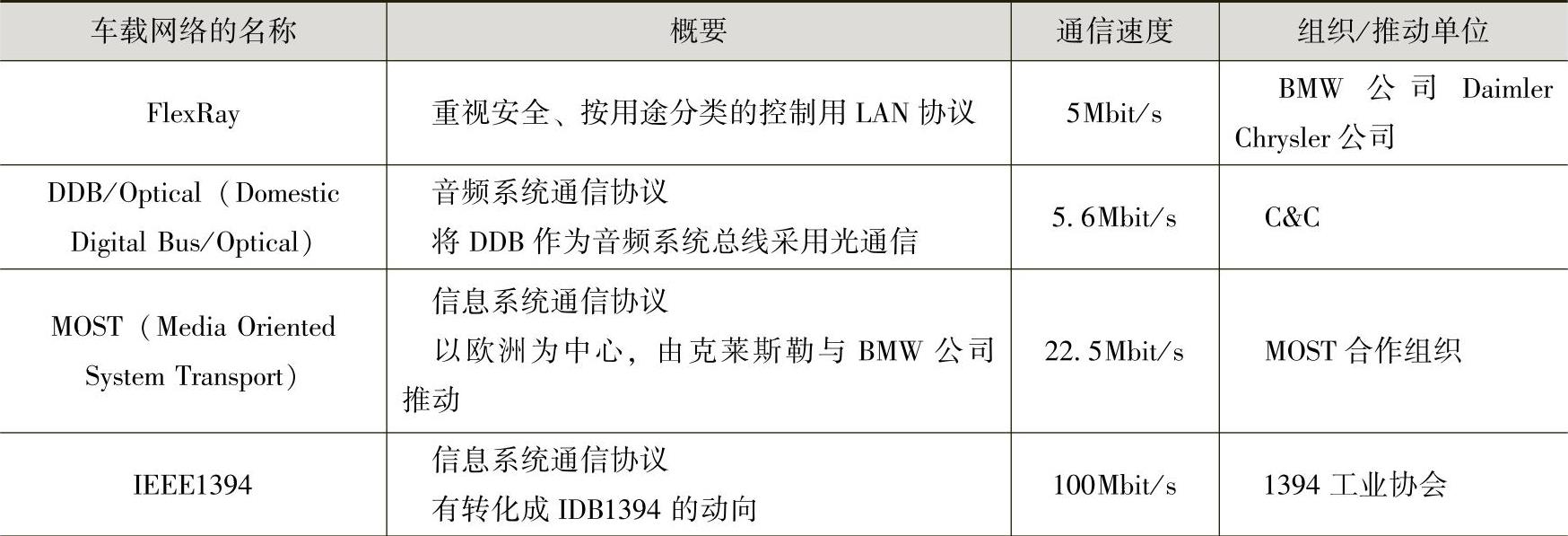
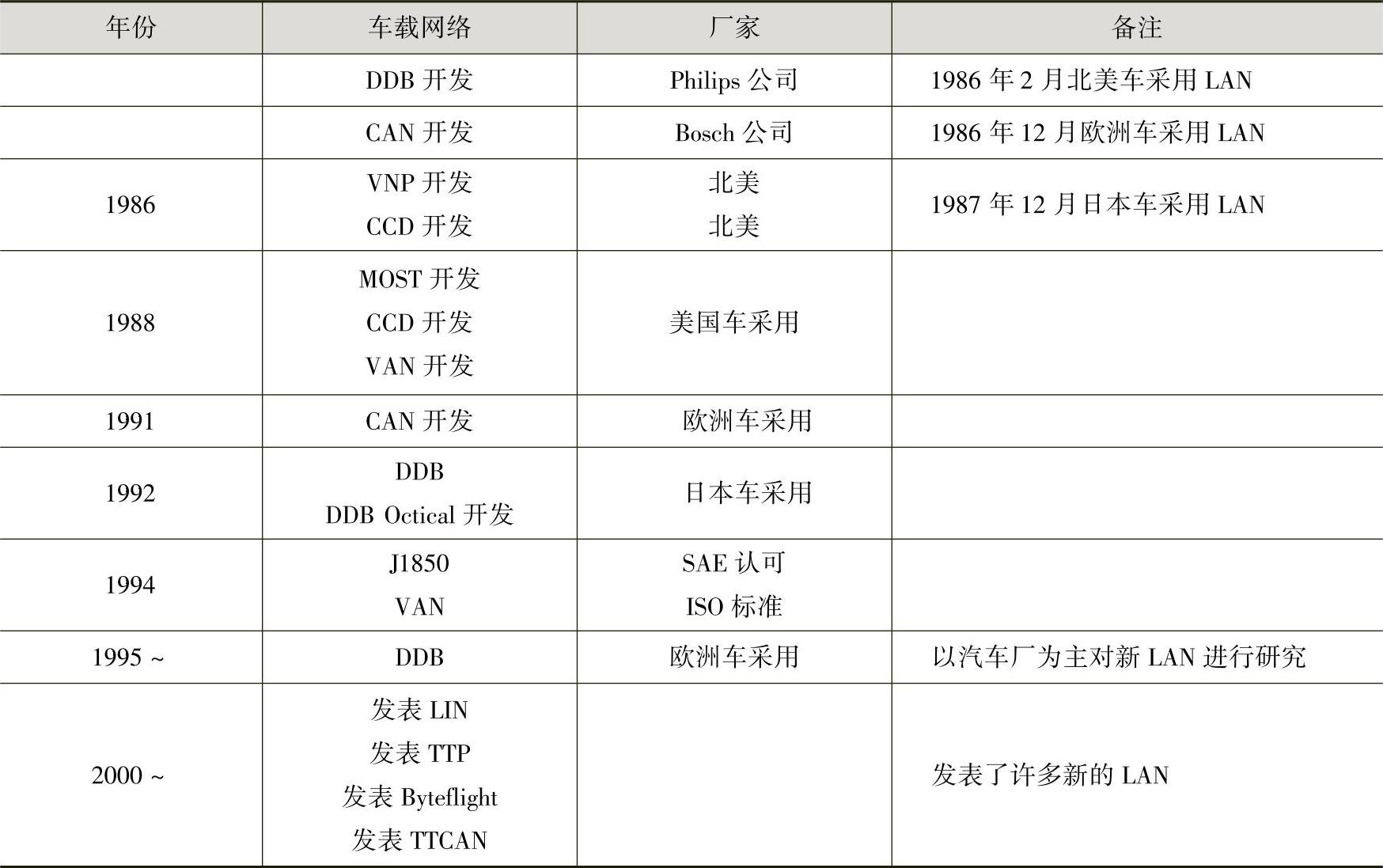
表1-3 几种车载网络的开发年份、采用厂家与发表年份
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





