智能电动车与普通电动车工作原理基本相同,均由车体部件、蓄电池、传动部件组成,不同之处如下:
其一是增加了智能传感器(见图1-81)和微电脑控制,智能行驶时,人的脚踏力通过传感部件进行测量,经微型计算机对信号的处理给控制器控制电动机的输出,人脚踩的力大,电动机加力就大,而且其辅助力的大小可任意调节。骑行过程中相当安全、省电,且使用方便,当不使用助力功能时,骑行又和自行车一样轻松,没有阻力。
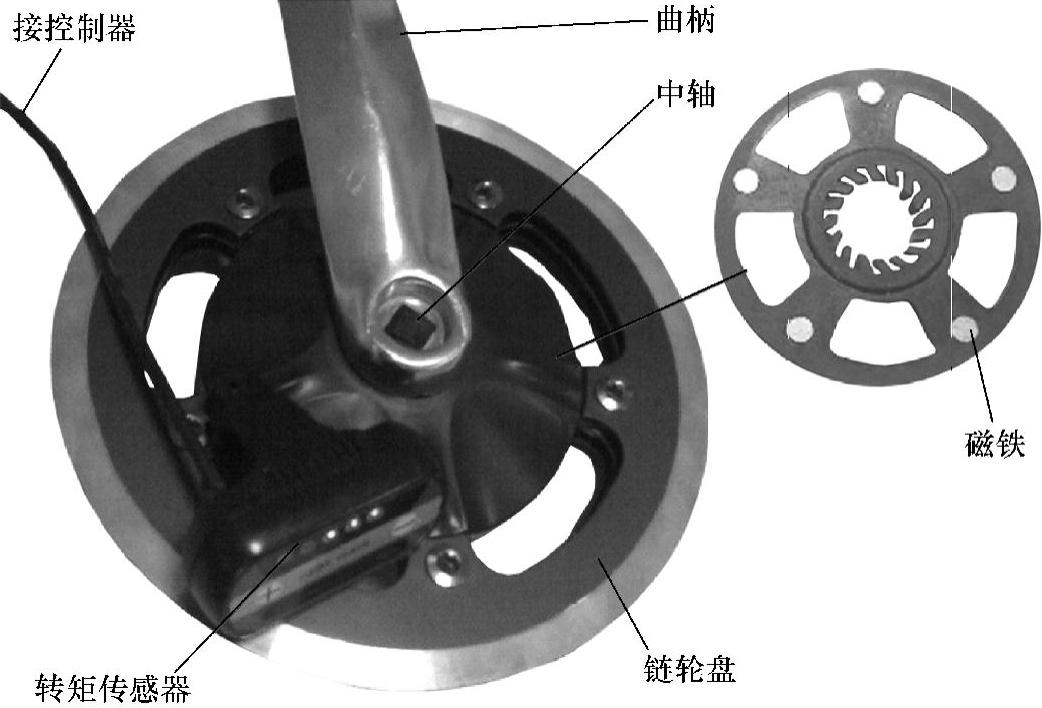
图1-81 智能传感器外形结构
智能电动车控制器通过霍尔速度转把采集信号,再通过数-模转换将信号传给微电脑单片机(见图1-82),利用单片机控制输出来改变功率管控制信号PWM的方法控制电动车的转速。由于车轮上安装有速度传感器,车轮每转动一圈霍尔传感器就会传递给单片机一个脉冲,单片机根据这个脉冲的频率来计算车速并通过数码管显示出来。另外,当蓄电池电压下降到最低程度时,设计有警示电路,通过发光二极管显示出来,对蓄电池起到保护作用。
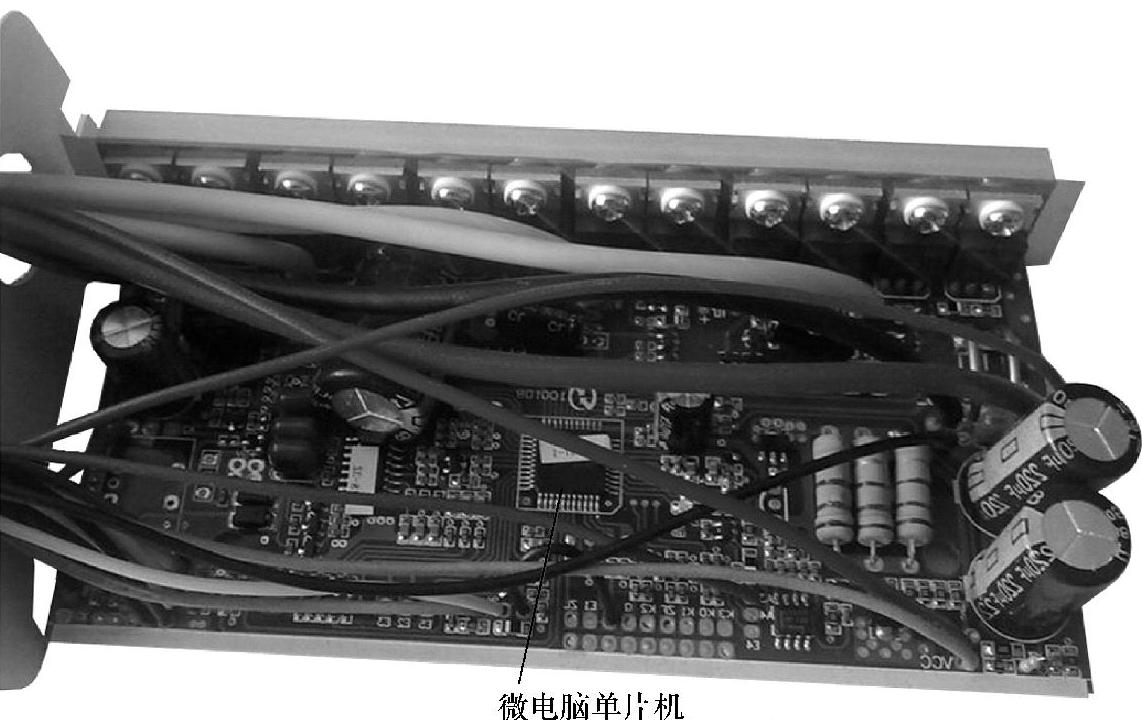
图1-82 智能电动车控制器上的微电脑单片机实物
其二是智能电动车电动机功率更大,速度更快,转矩更大,可以满足任何复杂路况。电动机与驱动轮合成一个整体(例如满盘电动机,见图1-83),运用新型恒磁材料,高达320Wb的磁通量,采用多条驱动通道,多个传动组合、多级磁能级数,多个节能控制模块,使电动机转矩增强30%,能耗降低10%,续航里程增加1/3。此类电动机与轮毂同尺寸,电动机的定子绕组及转子相应增大,因此电动机输出的功率相应增大。解决了传统磁能电动机动力小,里程短的难题,使用寿命是普通电动车电动机的2倍以上,是追求时尚与动力的消费者最喜欢的电动车之一。
其三是智能电动车一般采用智能控制器,除有基本的欠电压、限流、过电流保护功能外,还有故障自检显示、助力、巡航、电磁制动等多种功能。还有一种智能电动车采用智能双模控制器(见图1-84),能在霍尔元件正常时工作在有霍尔模式,当电动机霍尔元件损坏时,又能自动切换到无霍尔元件工作模式。不管是霍尔元件正常还是损坏都可以使用,给电动车正常行驶提供更多保障。

图1-83 智能电动车满盘电动机实物
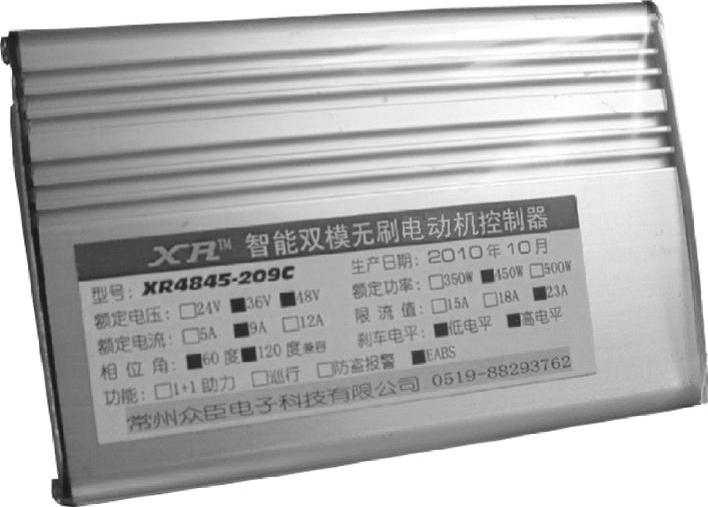
图1-84 智能电动车智能双模控制器
智能型电动车一般装配有刷控制器和无刷控制器,它们的工作原理如下:
1.有刷控制器工作原理
有刷电动机是靠换向器来保证转子(旋转部分)和固定部分的磁场保持连续朝一个方向的吸引力或排斥力的。由于有刷控制电动车有电刷,故控制器无需改变电流方向。(https://www.daowen.com)
图1-85所示为常用的有刷控制器的原理框图,从蓄电池电源输入到对电动机的供电,整个控制过程各部分电路的作用及工作原理如下:从图1-85中可以看出,蓄电池电压经稳压后为控制器提供工作电压。欠电压保护电路用来对蓄电池电压过低时起保护作用,当蓄电池电压降低到控制器设定值以下时,PWM芯片停止输出PWM信号,以保护蓄电池不至于在低电压时持续放电。限流电路用来对控制器输出的最大电流进行限制,以保护蓄电池、控制器和电动机等不会出现超过允许范围的电流。
2.无刷控制器工作原理
无刷直流电动机本身没有换向器,靠控制器来改变电动机绕组的电流方向,同样保证转子和固定部分的磁场,保持朝一个方向的吸引力或排斥力。这种控制器叫无刷控制器。
无刷控制器一般靠霍尔传感器确定转子磁场的位置,在恰当时机给相应绕组改换电流的方向。位置传感器除霍尔传感器外,还有光电传感器等。采用霍尔传感器的无刷电动机和无刷控制器之间一般有8根导线连接;3根粗线是绕组引线,5根细线中,一根为+5V电源,一根为公共地,三根为转子位置信号线。
图1-86所示为常用无刷控制器原理框图。
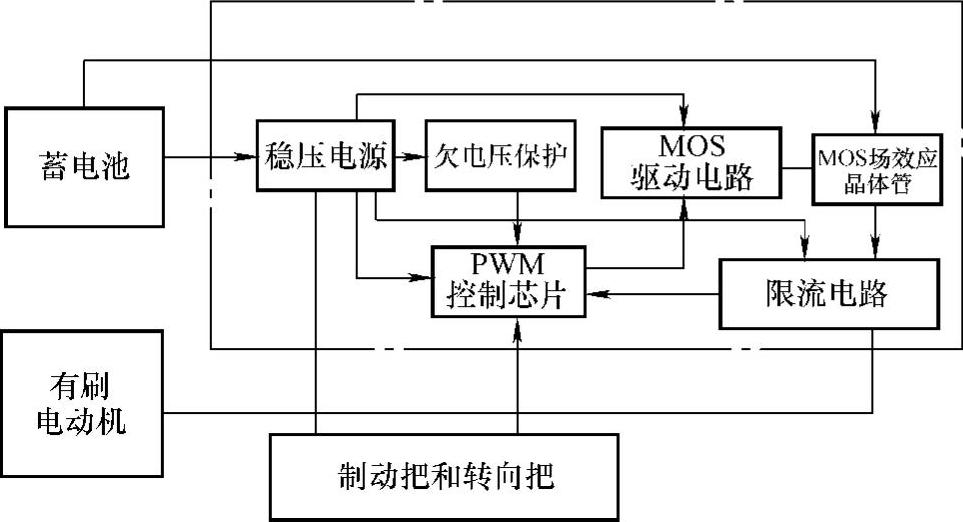
图1-85 有刷控制器的原理框图
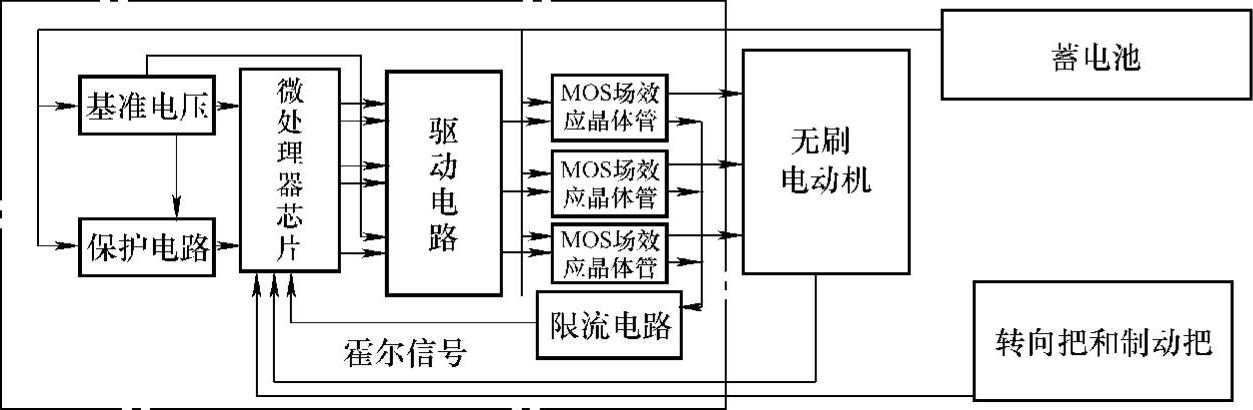
图1-86 常用无刷控制器原理框图
蓄电池输出的电压经稳压后为控制器内电子组件提供工作电压。
微处理器芯片根据无刷电动机的霍尔信号对MOS场效应晶体管驱动电路给出有选择性的打开与关闭信号,以完成对电动机的换向。同时,根据调速手柄的输入电压大小将相应的脉宽载波信号与MOS场效应晶体管导通信号混合,以实施对电动机的速度进行控制。
MOS场效应晶体管驱动电路将PWM信号整形放大,提供给MOS场效应晶体管。由于MOS场效应晶体管驱动电路具有升压功能,可以将MOS场效应晶体管导通信号变成高于蓄电池电压的超高方波信号,以满足MOS场效应晶体管驱动电压高于蓄电池电压的需要。MOS场效应晶体管是大电流的开关组件,其导通时间与关闭时间受导通信号与PWM信号合成的混合信号控制。
欠电压保护电路的作用是对蓄电池进行保护,当蓄电池电压降到控制器设定值以下时,PWM芯片停止PWM信号输出,以保护蓄电池不至于在低电压的情况下放电工作。
限流电路是对控制器输出的最大电流进行限制,使蓄电池、控制器和电动机始终工作在允许的电压范围内,不至于因过电流而造成损坏。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






