1.汽车操控性能概述
汽车的操控性是指汽车能够按照驾驶人通过转向盘给定的转向指令准确行驶的能力以及汽车在行驶过程中抵抗干扰、恢复和保持稳定行驶的能力。
汽车在行驶过程中,会碰到各种复杂的路面情况,有时沿直线行驶,有时沿曲线行驶。此外,汽车还要承受来自地面不平、坡道、大风等各种外部因素的干扰。一辆操控性能良好的汽车必须具备以下的能力:
①受道路、地形和交通情况的限制,汽车能够正确地遵循驾驶人通过操纵机构所给定的方向和信息行驶的能力,又称汽车的操纵能力。
②汽车在行驶过程中具有抵抗改变其行驶方向和信息的各种干扰、并保持稳定行驶的能力,又称汽车的稳定能力。
操纵能力和稳定能力有紧密的关系。操纵能力差,会导致汽车侧滑、倾覆,汽车的稳定能力就被破坏了。稳定能力差,则会失去操控性。因此,通常把汽车的操控性分别称为汽车的操纵能力和稳定能力。
汽车的操控性,是汽车的主要使用性能之一,随着汽车行驶速度的提高,操控性越来越重要。它不仅影响着汽车的运输生产效率,而且影响着驾驶人和乘员的人身安全。
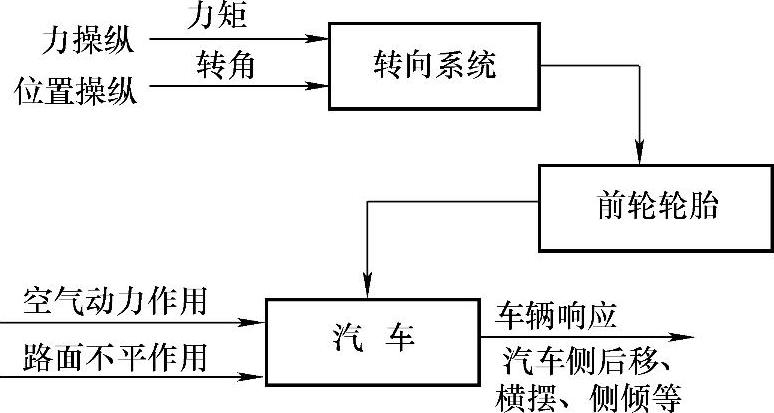
图5-1 作为开路系统的汽车
2.汽车操控性主要评价指标汽车的操控性主要由以下五个方面来评价:
(1)汽车的转向特性 把汽车作为开路系统进行分析时如图5-1所示。改变汽车运动状态的输入量(或称“干扰”)主要来自三个方面:①驾驶人通过力(力矩)或位置(转角)操纵转向盘,使前轮转向;②空气动力作用(如横向风);③路面不平对汽车的作用。
由上述三种输入所引起的汽车运动状况,分为不随时间变化的稳态响应和随时间变化的瞬态响应。例如,给等速直线行驶的汽车以前轮角阶跃输入,即急速转动前轮,然后维持前轮转角不变,一般汽车经过短暂时间后,将进入等速圆周行驶。一定车轮转角下的等速圆周行驶状态便是一种稳态响应,而等速直线行驶与等速圆周行驶间的过渡过程便是瞬态响应。

图5-2 汽车的不足转向、中性转向和过度转向示意图(https://www.daowen.com)
上述汽车的“等速圆周行驶”稳态响应,是评价汽车操纵稳定性的重要特性之一,称为汽车的“稳态转向特性”。汽车的稳态转向特性分成三种类型:不足转向、中性转向和过度转向,如图5-2所示。在圆周行驶时,驾驶人使转向盘保持一个固定的转角,令汽车以不同固定车速行驶,若行驶车速高时,汽车的转向半径R增大,这种汽车具有不足转向的特性;若汽车的转向半径R不变,这种汽车具有中性转向的特性;若转向半径越来越小,则具有过度转向的特性。只有具有适度不足转向的汽车,才具有良好的操纵稳定性。汽车不能具有过度转向特性。具有中性转向特性的汽车也不好,因为汽车本身或外界使用条件的某些变化,中性转向特性的汽车通常会转变为过度转向特性而失去稳定。
(2)汽车转向轮的摆振 所谓转向轮摆振,是指汽车在行驶过程中,转向轮绕其定位主销以一定频率和振幅发生左右摆振的现象。摆振严重时会伴有车架、车桥和车身的晃动。转向轮摆振增加汽车行驶的滚动阻力,造成轮胎和转向系统机件的早期磨损,严重时难于控制方向,影响行车安全。
汽车的转向轮通过悬架及转向机构与车架式车身相连,这些互相联系的机件,组成了多个弹性振动系统,如前轴绕纵轴的角振动、前轮绕主销的角振动等。
汽车摆振主要指外激力作用下造成振动系统的受迫振动以及自激振动引起的转向轮角振动。受迫振动是周期性变化的外力激发所引起的振动,外力消除后,振动自行衰减。自激振动是偶然单次外力激发的振动,虽然外力消除,而振动并未消减,使汽车持续振动。实践证明,造成汽车转向轮摆振主要结构问题是转向系统刚性不符合要求以及机件的相互干扰。
转向轮摆振是汽车转向系统参数发生变化造成的一种综合性故障。通常表现为如下两种现象:
1)转向盘振抖。车辆行驶中出现转向盘振抖时,转向轮并无明显摆动,转向盘振抖随车速不同而变化,加速时振抖加剧,降低车速后振抖会减轻或消失。
产生这种故障的主要原因是:①转向器间隙过大、转向机构各铰接处连接松旷,转向盘自由量(游隙)超标;②转向器橡胶衬套磨损过度,配合间隙过大;③转向轮胎面异常磨损,轮胎气压超标或两轮之间压差过大及轮胎钢圈变形;④转向轮轴承松旷,配合间隙过大或损坏;⑤轮胎质量分布不匀,动不平衡量超过规定。
2)转向盘摆动。汽车行驶在某时速时,突然发生转向盘剧烈摆动,同时转向轮也出现摆动(汽车摆头)。这种现象在路面较差的条件下极易出现,并与车速有极大关系。有的车发生在时速20km/h,有的车发生在时速60km/h,低于或高于这些车速段,转向盘摆动即可得到缓解和消失,方向可暂时得到控制。
产生这种故障的主要原因是:①底盘车架或车身变形,前减振弹簧松动或左右两侧弹力相差太多;②底盘前轴变形,前轮定位参数不符合要求;③车辆装载物超长,装载重心过分靠后。
(3)车轮回正力矩(绕纵轴z轴的力矩) 在轮胎发生侧偏时,会产生作用于轮胎绕z轴(垂直于地面)的力矩Tz。汽车圆周行驶时,Tz是使转向车轮恢复到直线行驶位置的主要恢复力矩之一,称为回正力矩。
回正力矩是由轮胎接地面内分布的微元侧向反力产生的。可以认为地面微元侧向反作用力的分布与变形成正比,其合力F的大小与侧向力Fy相等,其作用点在接地印迹几何中心的后方,偏移某一距离e,e称为轮胎拖距,Fy与轮胎拖距e的乘积就是回正力矩Tz。轮胎拖距会随着侧向力的增加逐渐变小。
(4)汽车弯道行驶的横向稳定性 汽车横向稳定性的丧失,表现为汽车的侧翻或横向滑移。由于弯道侧向力作用而发生的横向稳定性破坏的可能性较多,也较危险。
随着行驶车速的提高,在离心力的作用下,汽车可能以外侧车轮为支点向外侧翻。当内侧车轮法向反力FzR=0时,开始侧翻。因此在公路建设上常将弯道处筑有一定的坡度,以提高汽车的横向稳定性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





