前面提到的误差模型非常简单,因此这样是不适合用于描述真实误差的。当确认一个与EMI有关的系统时,我们需要考虑多种误差的来源。仅仅把每个来源分开处理是不够的,取而代之,要把它们综合起来,考虑一个关于总线延迟共同造成的最坏工况干扰。此外,每一个源通常可以通过或短或长的脉冲的信号模式来表征,在此期间总线是不可用的,即在总线上不可能有信号传输。
广义确定性误差模型由普内卡特等[44]提出,它具有以下特征:
•模拟总线不可用时段期间的干扰时间间隔;
•与丁达尔的误差模型相比,允许指定更多的广义干扰模式;
•允许模拟多种干扰源的合并影响。
根据广义确定性误差模型,Ei(t)基于以下几点定义:
·有k个干扰源,每个干扰源l对误差的贡献项为Eli(t)。它们的合并影响为:Ei(t)=E1i(t)|E2i(t)|...|Eki(t),其中∣表示误差项合并记号。本章一般不用加号(+)来表示误差项的合并。
•每个源l通过在一个特点的时间周期Il诱导一个未定义的总线值来产生干扰。每个这样的干扰都会导致传输误差。若Il大于τbit,则误差恢复会相应地被延迟。
•每个源l的干扰模式可独立规定为:
–周期为Tlf的初始脉冲组bl,其中每组由长度为Il、周期为tlf的nl个干扰。
–在最初一组脉冲、即bl*Tlf之后,每rlf单位时间、长度为Ilf的单一干扰的残余误差率。
图13.9展示的是一个bl=4、nl=3的单一干扰源的干扰模式。
现在Ei(t)定义为k个干扰源:

其中
 (https://www.daowen.com)
(https://www.daowen.com)
其中

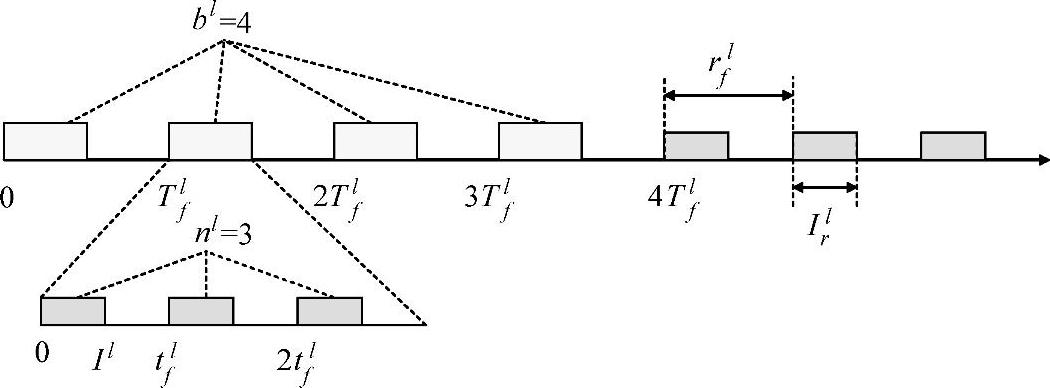
图13.9 带bl=4个脉冲、每个脉冲产生nl=3个干扰的单一干扰源的干扰模式, 其下面是每rlf时间单位的单一干扰的残余误差率
以及

以下给出一些说明:
max(0,Il-τbit)定义了Il超过τbit的长度;
nl*bl是最初脉冲周期内产生的最大干扰数;
 是到t时刻为止产生的全部脉冲数;
是到t时刻为止产生的全部脉冲数;
 是在t时间内适合最后一个脉冲周期(不完整周期)的、长为tlf的周期的数目。
是在t时间内适合最后一个脉冲周期(不完整周期)的、长为tlf的周期的数目。
在上面Eli(t)的公式中,该模型使用不同的上角标来表示脉冲(Obi)和单一误差(Ori)。用不同上角标因素来表示的优点在于:如果这些因素已知,那么模型会变得更加精确。这会减少尤其是在脉冲条件为Obi>tlf时的不利因素,因为在这种情况下我们可以把几个脉冲误差合并成为一个误差,再加上脉冲宽度(Qsi+nl*tlf)。然而,对于许多实际的应用以及在系统设计中,人们会假定脉冲误差和单一误差的上角标相同,都用Oi表示,并由下面公式给出:

容易知道,丁达尔模型是广义误差模型的特例,有1个误差源(k=1)、1个原始脉冲(bl=1)、带有脉冲误差数为nerror[Bul(t)=nerror]、rlf=Terror以及干扰数Il=Ilr=τbit。然而,在丁达尔的模型中,未规定具体干扰(Il)持续时间,也没有规定脉冲组的参数(bl和Tlf)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






