回归与背靠背测试的信号比较
在定时测试方案中,也就是测试执行导致定时测试输出,系统的反应以定时信号的形式呈现。因此,定时系统反应(输出时间序列)需要在测试评估过程中与定时参考行为(参考时间序列、黄金参考或基准线)做比较。因此在这种情况下的测试评估的本质是执行在输出时间序列o*′(t)和参考时间序列o*′(t)之间的“信号比较”。由于只有在特殊情况下才需要考虑实际的精确平等,所以有必要使用合适的“鲁棒信号比较技术”,它可以允许待比较的时间序列之间有时域和值域方面的偏差。
“人工信号比较”可以通过对输出时间序列和参考时间序列在绘制的一个相同的图上的视觉评估来执行。这样的检查不一定会专注于绝对的等同,而是在于一定的相似性:如果信号图足够接近,那么信号可以被考虑相似。然而,这种视觉检查不仅高度主观,而且与比较的信号的数量和大小有关,很容易出错,而且还非常消耗时间。它也需要有经验的测试人员。
“自动信号比较”的目的是自动评估测试对象的系统反应是否和前面提到的基准线十分相似。因此,测试评估判断o*′(t)与o*′(t)是否相似。如果没有时间序列之间的相似性可以自动识别,那么需要尽可能检测和定位出现的偏差。在这种情况下,为了方便进一步的人工评估,需要提供给测试人员合适的信息。
自动信号比较中流行的方法,包括绝对偏差、相对偏差和斜率相关偏差。
1.“绝对偏差”:

2.“相对偏差”:

3.“斜率相关偏差”:

考虑给定测试对象的一个输出变量oj,在上面的公式中,oj*′表示期望的/参考的时间序列输出(在测试设计中定义),oj*表示真实的时间序列输出(在测试执行中获得)。
这些“差异性标准”适用于检测值域中的简单偏差,但是不容许时间域中比较信号有(部分)偏差。
为了允许偏差,在存在大幅值或大斜率的情况下,相对偏差和斜率相关偏差严重超过小幅值或小斜率的偏差。但是在过零点,即使是非常小的偏差也将会导致不允许的大偏差。为了解决这个问题,相对于斜率相关偏差可以参照文献中推荐的方法修改[CSW06]:
4.“修正的相对偏差”:
5.“修正的斜率相关偏差”:(https://www.daowen.com)

在没有高估小幅值或小斜率偏差的情况,这些公式所给出的修正量加强了大幅值或大斜率的偏差。
选定的偏差标准针对给定时间序列的所有时间步骤ti计算。为了生成测试结论,这种方式获得的最大偏差然后与“最大允许阈值”(最大容许偏差)相比较。
为了评估PedInt组件的测试方案#1(见第11.2.2.1节),有关两个踏板标志的系统反应必须和预期输出进行比较。因为加速踏板和制动踏板都是布尔值,所以选择允许偏差是0的absDiff(绝对偏差)。
图11.15中的顶部显示了制动踏板时间行程。其中大于阈值ped_min的部分用颜色做了标记。下面的图显示了制动踏板标记的预期值(实线)和实际值(虚线)。由于在0.2和0.3之间的区域并不相同,所以制动踏板识别结果并不和规定一致。与此相仿的是,最下面的两个图关注加速踏板激活识别。在这里,它工作正确。实际的和预期信号反应是一致的。
产生这种错误行为的原因可能是实施的对比算法(图11.4),它比较了制动踏板行程phi_Brake和各自的阈值ped_min,不正确的检查:用>=代替>。
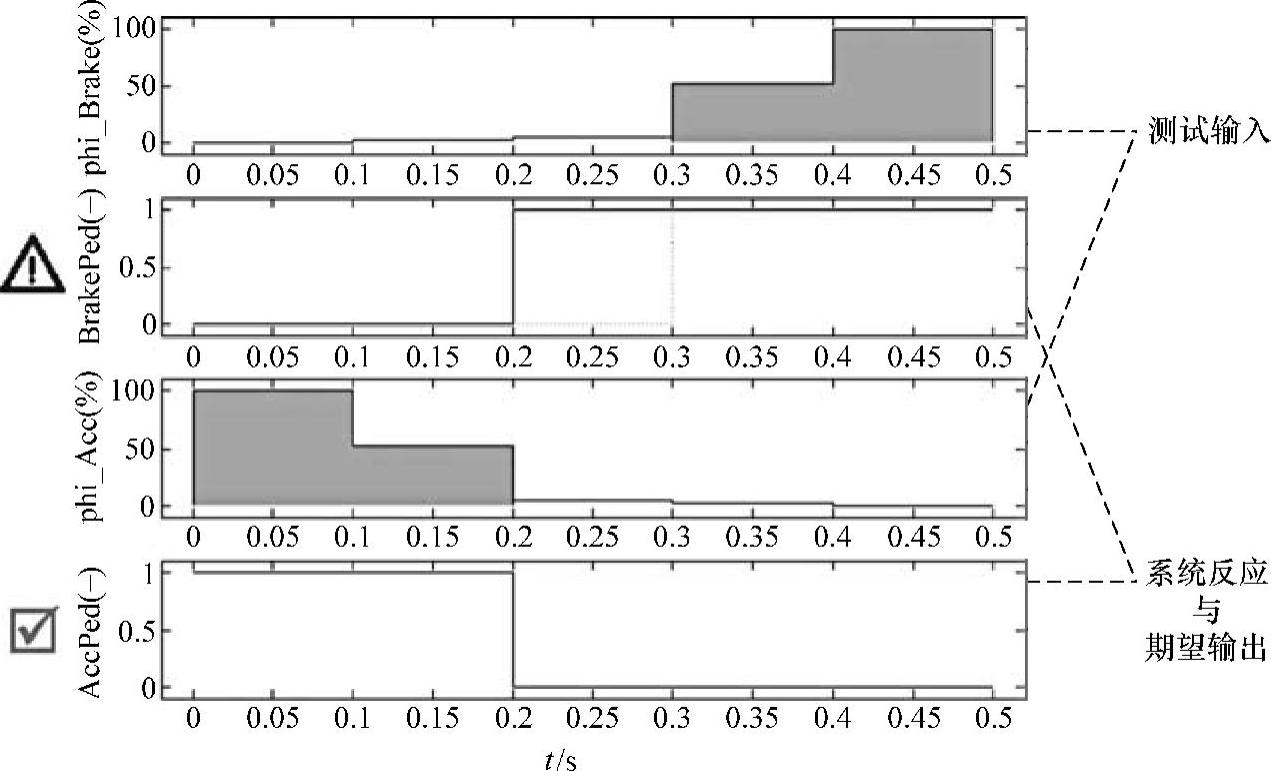
图11.15 PedInt的测试评估(测试方案#1)
用于鲁棒信号比较的更强大的程序是当前研究课题[DSS+01,HT01,RWS+01,SWM02,WGP02,CS03]。
参考文献中提到在应用领域肯定流行的是:“差分矩阵程序”和下行差分计算的组合[WCF+02,CFP03,CSW06]。
这种两阶段的信号比较技术,首先通过使用差分矩阵算法预处理两个时间序列来存取瞬时偏差;其次,预处理过的定时信号根据以上提到的初步差分标准比较,来评估值域的差异。这样,值域中的偏移与偏差可以分开识别与判断。
当使用差分矩阵程序进行预处理时,系统的反应通过拉伸或压缩时间被调整到预期的输出。被拉伸或压缩的程度表示瞬时位移。其核心思想为:假设我们要研究两个信号之间在时间上互相转移的相似性,我们可以使其中的一个信号向另一个转移,然后检测剩余偏差。从数学上来讲,移动一个信号朝向另一个信号对应一种特殊的信号“重新参数化”(时间上重新排序)。差分矩阵程序寻找一般参数化,这样一个信号尽可能和另外一个信号匹配。因此,要考虑可能的局部漂移和压缩。
因此,该算法计算了系统反应oj*(t)的合适的重新参数化(时间重新排序) ,使系统反应尽可能接近参考信号oj*′(t),也就是说得到最好的匹配,oj*(t)≈oj*′(t)。当进行这些工作时,时间序列中的采样点的时间顺序必须遵守。
,使系统反应尽可能接近参考信号oj*′(t),也就是说得到最好的匹配,oj*(t)≈oj*′(t)。当进行这些工作时,时间序列中的采样点的时间顺序必须遵守。
如果差分矩阵程序中发现的时间偏差不超过某一阈值,那么利用以上提到的差异标准,就可以评估重新参数化的信号之间的相似性。
对于测试对象来说,存在很多测试评估程序能够完成具体的先决条件。例如,Watkins[Wat82]介绍了一种控制软件程序,它计算了足够的连续性函数,其中未来的系统输出可以之前的输出为基准进行估算和监测。在实践中,有必要组装适应于特定问题的评估程序。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



