TTCAN是一个ISO标准[ISO01],它的研发基于一个高精度的网络范围的时基,提供额外的时间触发传输控制给原始的CAN协议。这减少了CAN抖动的限制,使得传输时间具有确定性,提供了一种方法进行及时检测接收器端的遗漏,使得能够快速应对这种情况。
TTCAN中存在两种可能的状态,状态1使用本地时间(周期),状态2使用硬件支持外部时钟同步,在CAN控制器之间执行连续漂移校正。时钟同步由一个时间主节点执行,发送特定的时间参考信息。
TTCAN采用TDMA介质访问协议。网络节点被分配不同时段来访问总线。分配给节点时段的顺序以基本周期来描述,这些反过来在矩阵周期中组合(图6.16)。矩阵中的所有基本周期具有相同的时间,但可以有不同的时槽(或时段)结构。矩阵在一个周期中被顺序扫描,并无休止地重复,该矩阵定义了一个周期信息传输计划。每个基本周期从传输参考信息开始。
因为TTCAN是在CAN基础上构建的,所以它继承了CAN的大部分属性,包括1Mbit/s的最大传输速率、短时有效载荷良好的带宽效率和分布式仲裁机制。这种机制是用于多个目的的,即支持共享时槽——称为仲裁窗口,其中如果事件信息在时槽的开始就准备好了,那么就可以传播;并容忍在时间域内的偏差,它不会引起数据的直接损失,相反但会延迟传输。毕竟,后一方面几乎被所有时间上更高层协议所共享,可以增加它们的鲁棒性。一般来说,节点使用单发传输模式,也就是说,它们要么成功地立即开始传输,要么不会传播。这也意味着自动传输错误是禁用的。
TTCAN可以四个模式来操作:配置、CAN通信、时间触发通信和事件同步时间触发通信。模式之间的变化意味着回到配置模式。为了安全起见,这种模式也是唯一一种可以写到系统矩阵上的模式,从而暗示一个运行时的静态周期调度表。
类似于CAN的做法,TTCAN使用错误控制策略(ISO11898-1),即基于错误被动和总线断开状态,但是增加了检测调度错误,例如,缺乏信息或在一个专用时槽中的冲突。这个信息可以在更高层次使用,来实现其他主动故障约束机制。错误被动和总线断开机制操作相对缓慢,它们取决于检测到的频率和错误类型,但它们根据TTCAN规范,最终提供故障沉默。与CAN类似,总线监控者不在标准(6.1节)中考虑。(https://www.daowen.com)
已经产生了一些争议的一个特殊方面,就是使用单发传输模式。在这种情况下,早已在6.2节讨论过的对不一致场景反应,是大大不同于CAN的。事实上,没有自动重传将避免不一致的副本,但生成IMO的概率将更高。因此一些作者声称:与CAN相比,TTCAN较少适合对安全性要求苛刻的应用程序[RODR03a]。
最后,TTCAN还提供了一种机制,用于时间主节点复制及更换以确保参考信息的连续传输。
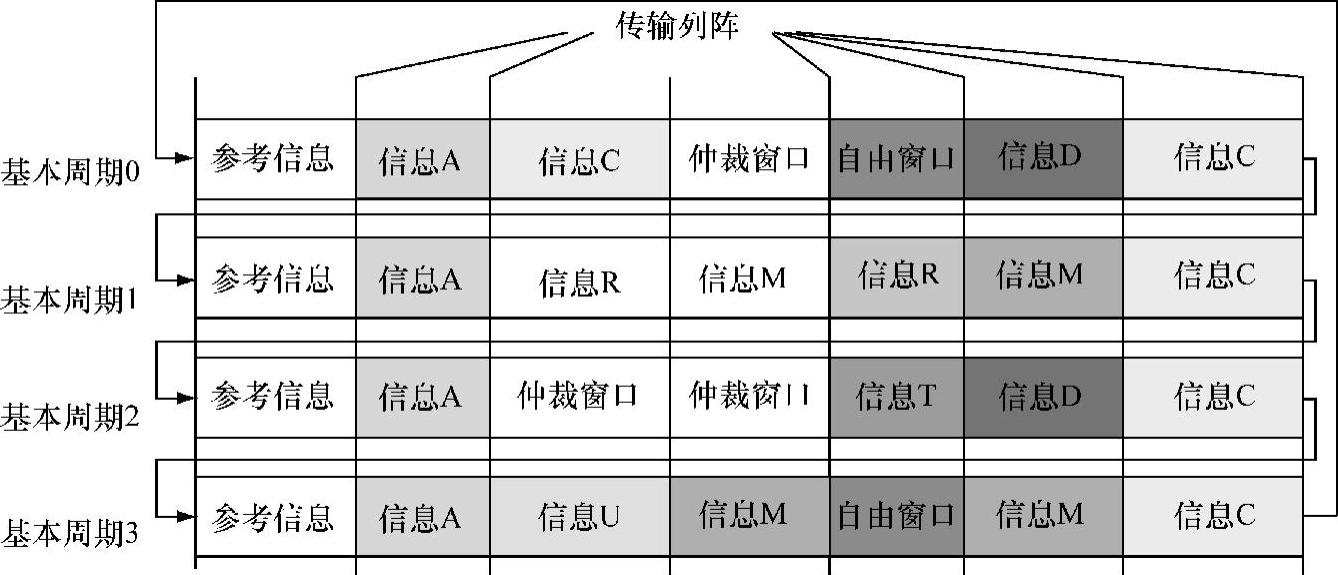
图6.16 具有四个基本周期的TTCAN系统矩阵
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






