小区域的现场总线网络被建立在许多应用域中,这些应用域包括了过程控制、医疗、汽车制造等[THOM98]。已建立许多现场总线通信协议,但最常见的现场总线包括Profibus[TOVA99]、控制器局域网(CAN)[ETSC01]和执行器传感器接口ASi网络[MIRO99]。也有针对高度可靠性的航空电子设备和汽车应用的特定的现场总线协议,如TTP/C[TTPC]、FlexRay[FLEX05]和SAFE-Bus[HOYM92]。不同于其他著名的网络结构,如互联网,这些所谓的现场总线网络的共同点是它们有一个仅由两层、三层组成的协议栈,如图6.2所示。CAN协议是一种两层的现场总线协议,它最初由博世公司在20世纪80年代早期开发,并试图用于控制应用程序[CAN91]。目前,CAN广泛应用于许多应用领域,如汽车、家庭自动化、铁路、航空航天、海洋、嵌入式机器控制、机器人、工厂自动化、过程自动化、医疗设备、建筑自动化和实验室设备等[CAN04]。
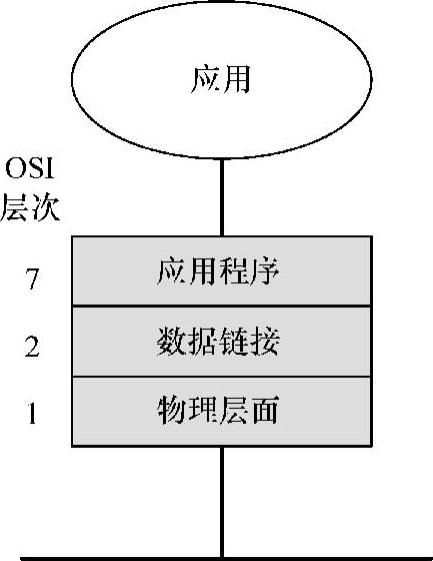
图6.2一 个现场总线装置的通信架构(www.daowen.com)
然而,最佳的汽车网络解决方案是已经存在的还是正在进展中?最佳,是指以一种简单、有效且低成本的方式满足上述要求的网络技术。虽然在主干网层上确定最佳的汽车网络解决方案还言之过早,但在子网层上CAN是目前最好的网络技术。和其他替代技术如FlexRay(见第5章)和TTP/C(见第15章)相比,CAN没有考虑高速协议。不过,CAN可以为车载监控、诊断、配置和控制应用程序提供足够的速度(见上面的要求)。
本章总结了基于CAN架构、适合车载子网的若干建议。所有的建议旨在改善网络的可靠性,同时提供不同程度的灵活性和确定性,并在一定程度上利用原有的CAN协议。一个真正灵活的通信架构可以通过简化产品开发,并将其转化为底盘、动力总成、线控、车身和娱乐部件的集成任务来支持灵活的汽车架构。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






