在任何控制系统中传感器是必需的要素,且当我们想给驾驶人推出某种形式的帮助时,传感器技术特别适用于道路车辆。在这里,我们将简要概述现在工业上使用的传感器。
如图3.1所示,传感器在不同的应用范围内工作。超声波传感器提供帮助低速操作,如停车,而相机和激光器为城市道路驾驶辅助提供足够的距离范围,而雷达通常用于高速驾驶时,探测车辆前方路况。

图3.1 传感器植入和探测距离介绍
3.2.1.1 超声波传感器
这些简单和廉价的主动式传感器通过电驱动的静电或压电换能器,发出一个圆锥形的超声波,并通过对称传导接收回波。测量发射和接收时间之间的时间间隔给出了距离最近障碍的一个估计值,且最大探测距离有好几米[7]。超声波传感器也可以用于角位置估计,具体见参考文献[8]。
超声波传感器目前一般使用在汽车行业的一些应用场合,最常见的是倒车和停车辅助系统,以及入侵检测系统。在欧洲,每个主要汽车制造商在中级和顶级车辆上提供这些选项。然而,这些传感器只给驾驶人一个音频反馈,因此还没有它们参与控制车辆的应用场合。这在未来可能会改变停车帮助,其中传感器可以用来准确检测可用停车空间以及停车过程中的回旋余地。
3.2.1.2 惯性传感器-加速度计-陀螺仪
完整的惯性测量装置是由六个传感器组成的,它们可以测量车辆的六个自由度(DOF),即三个方向转动(俯仰、侧倾和偏航)以及三个加速度。
然而,由于车辆操纵是在道路上进行的,如图3.2所示的Ox与Oy平面,定位所需的自由度问题可以简化为绕垂直轴旋转的运动(偏航)和纵向加速度测量,它们足以重建一个近似的车辆的轨迹。如果车辆不打滑的话,测量车轮转动及转向角是一个便宜的策略。
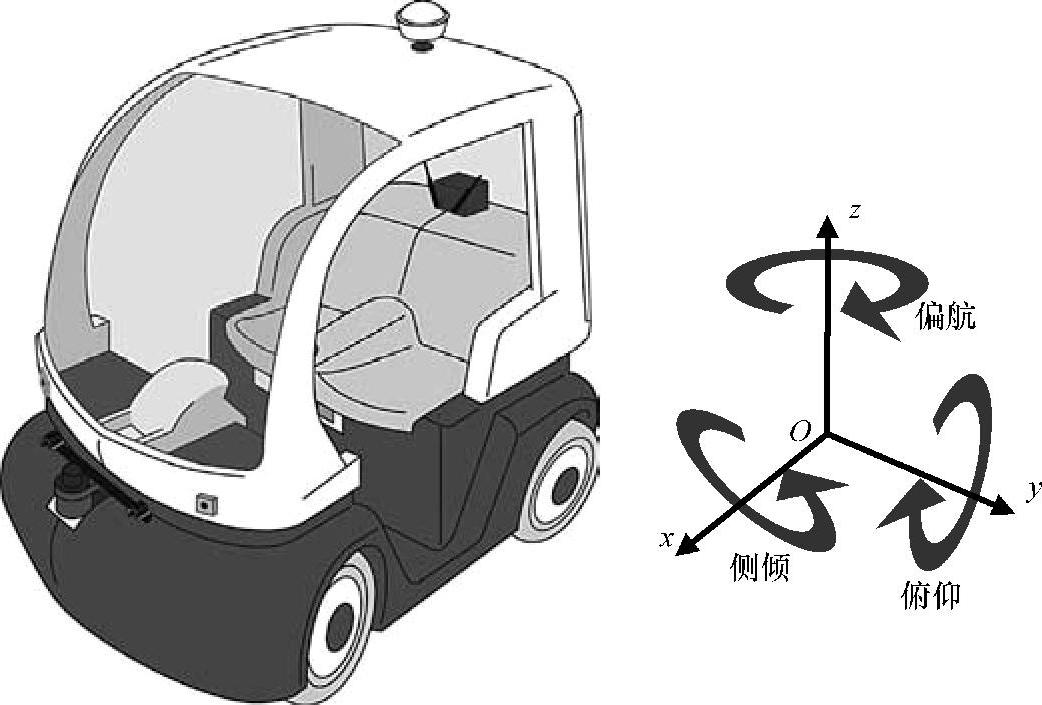
图3.2 地面车辆运动自由度
3.2.1.3 光探测与搜索或激光探测与搜索
光探测与搜索(LIDAR)或激光探测与搜索(LADAR)通常是军事领域中使用的术语,是主动式传感器,它是由一个光源、一个光子探测系统、定时电路以及光源与接收器组成的光学系统。激光雷达发送一个连续调幅信号,并确定回波的相位偏移[9]。
使用一个固定的正弦频率f,如果有一个物体在距离d处,那么一个相位偏移Δφ=2πf(2d/c)将在传播信号和接收信号之间观察到,其中c表示光速。一个目标的估计距离由下式给出:d=Δφc/4πf。
通过相移可以测量估计的最大距离由下式计算给出dmax=(2πc/4πf)=(c/2f)=(λ/2),其中λ表示指定信号的波长。在(测量)距离之外,相位的转数就会变得不确定(表3.1)。
表3.1 采用相位偏移估计的最远距离

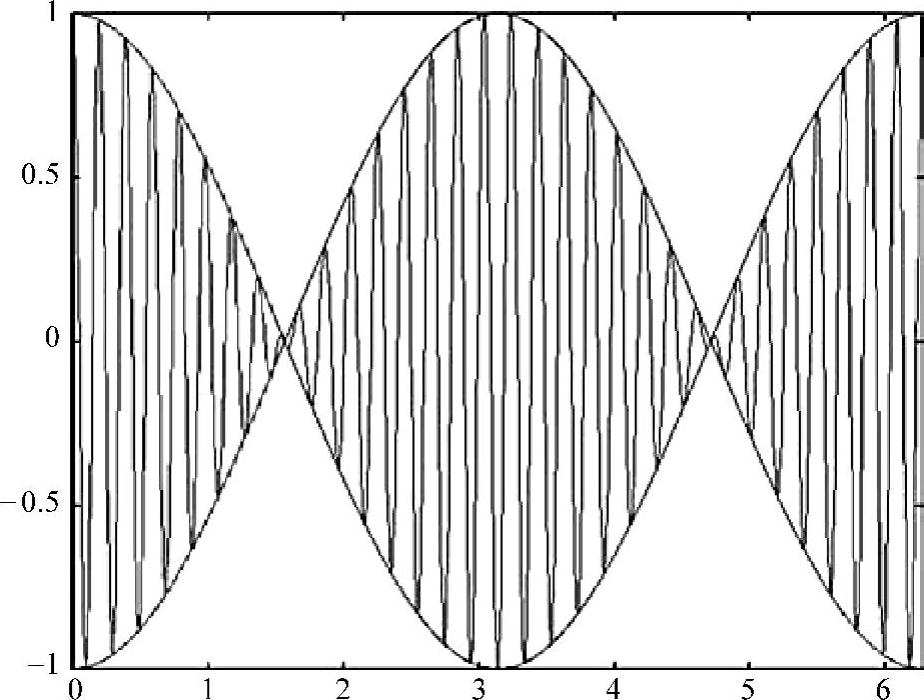
由于红外信号具有微米波长,所以通过使用相位包络,幅值调制(图3.3)被用于绕过相移测量的局限性,与此同时又保持红外载波传播的优势。
另一种激光雷达技术是发送脉冲,接收反射波,并测量来回行程的间隔。通过伪随机编码,脉冲进行了幅值调制,以促进传出和传入的信号的联合。
使用一个旋转头(一根或两根轴)或使用镜子,执行多次扫描,这样障碍的距离是在无数个方向上决定的。在分辨率、光圈与扫描速度之间进行折中,因而适于应用的令人满意的性能就获得了。在好天气条件下,允许的激光源可以检测障碍物远达200m,精度是几厘米。
这样的扫描设备的主要问题来自于机械部件的成本和可靠性(超过汽车的生命周期)。微机械技术可能指明了前进的道路。减少的大小带来了减少的惯性,反过来会允许更高的性能[10]。微镜阵列可以被证明是控制LIDAR传感器分辨率的一个非常有用的技术。微镜也可以作为一个分布式扫描仪,它可以产生大量的微光束,并从不同的角度和位置来扫描工作区。
 (www.daowen.com)
(www.daowen.com)
图3.3 幅值调制
3.2.1.4 无线电探测与搜索
无线电探测与搜索(雷达)是一种主动式的传感器,它发送一个高频率电磁波,并立即接收其反射回来的回波,按照这样处理,障碍物的距离、方位和速度就可以确定[11]。
在脉冲模式下,使用多普勒效应,可以测量目标的相对速度(vr),其中频移Δf等于2vrf/c。测量距离通过反射信号的强度估计值来获得,比例因子为1/d4。
也可以采用激光雷达、连续波雷达,但这一次使用频率调制,因此由多普勒频移引入的模糊性被足够的频域处理抵消了。在高频率(大概77GHz)处,调频连续波(FMCW)技术往往更经济,这是因为脉冲传输控制需要昂贵组件。FMCW还提供了非常短距离的捕捉能力,因为回声不断被捕获,而脉冲调制应用在一次脉冲之后需要恢复时间[12]。
汽车雷达用12°的搜索区域可以探测远达150m距离。它们可以测量的相对速度高达60m/s(215km/h),精度是1‰。
3.2.1.5 视觉传感器
视觉传感器提供高达1百万像素的2维阵列的宽视野,角视野取决于光学器件。互补金属氧化物半导体(CMOS)成像器要比电荷耦合器件(CCD)展现更大的优势,这是因为前者有一个更广泛的(非线性)的亮度范围、较低的功率消耗和成本,并有独立的像素处理设施[13]。系统芯片(SoC)技术帮助设计出能够快速输出预处理过的基元的集成设备,然后这个输出由更高级别的应用程序处理[14]。
立体视觉系统分析取自略有变化视点的两个快照。适当的算法匹配两幅快照中的像素,并计算“视差图”,追踪两幅图像之间的像素改变(当相机具有平行的视线时,这种转变是水平的)。如果立体相机被校准过,那么可以根据视差图重建目标的空间分布。
相机的光学中心之间的测量标准——基准——确定了距离估计的有效性。近距离植入相机将提供精确的短距离估计,但带来小的最大距离,而一个大的基准线将提供更好的最大距离,但牺牲了短距离精度。
汽车市场开始使用相机出现在20世纪90年代末期。首次商业应用之一是车道偏离警告——在2002年的奔驰货车上,以及2005年雪铁龙的C4系列和C5系列汽车上,其中警告是由“触觉装置”(振动座椅)执行的。奔驰S级汽车在2006年出现了夜视模块。然而,大多数的应用场合(在这里再次说明)关注带给用户的信息,而不是关注真实的控制。
立体视觉障碍检测系统正在由原始设备制造商(OEM)供应商、建造者和研究人员研究,正如在一些PReVENT的子项目比如APALACI上所见到的,它们旨在检测易受伤害的道路使用者和行人安全与危险的缓解[17]。
3.2.1.6 全球导航卫星系统
全球定位系统(GPS)是美国国防部在1980年推出的一个系统。它提供这个地球上任何位置上有关时间、位置和速度的信息。24颗卫星均匀布置在离地面20200km高空的、圆形12h轨道上,并与赤道平面倾斜55°,从而以一个合理的成本提供一个全球覆盖。卫星使用原子钟来保持时间一致。它们分别使用1227.60MHz和1575.42MHz频率,能够传输两个微波载波。前苏联在1982年已经启动了一个类似的定位系统,叫做格洛纳斯,而欧洲自2006年年底,一直在测试伽利略系统,并计划在2010年投入使用。伽利略是欧盟委员会和欧洲太空总署(ESA)的一个联合项目,针对民用,它由这些机构和两个私人财团资助:Eurely(EADS/Thales/Inmarsat)和iNavSat(Alcatel/Finmeccanica/AENA/His-pasat)。伽利略的30颗卫星将普及公众定位服务,精度为5m,商业定位服务精度达1m,并为一些重要的民用应用提供服务。
全球导航卫星系统(GNSS)的基本原理是三角测量。如果接收器可以估计其本身和几个卫星(它们的位置是众所周知的)之间的距离,那么接收器必须位于一个立体内,且定义为每个卫星球体中心与半径等于相应估计距离的交叉。后者通过估算发射卫星和接收器之间的传输时间来得到。发出的消息包含一个与绝对接收时间对比的时间戳,且接收器与24颗卫星是同步的。这个时间必须非常精确,因为,在光速下1μs的误差将导致300m的偏移。
在图3.4中,GPS接收器的定位通过使用先验信息来计算:由卫星传递的位置p1、p2和p3,和估计的伪距r1、r2和r3,根据信号传输的时间来获取。接收器位于球体的交叉点,球体中心分别在p1、p2和p3,它们的半径分别等于r1、r2与r3。
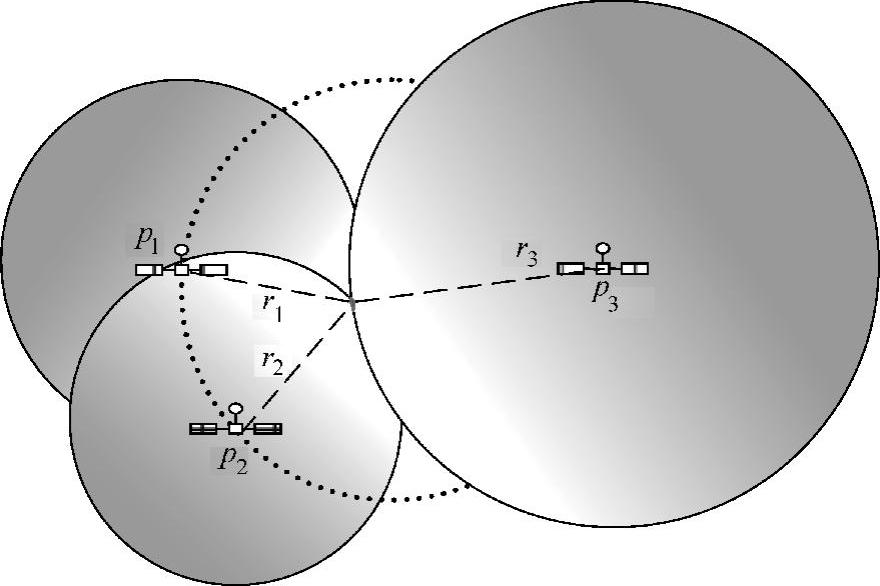
图3.4 GPS三角测量
为了得到球体中心的精确位置,卫星传输它们的实时轨道,因而使得偏离名义轨道的偏差不会转嫁到接收器的位置估计上。此外,为了获得球体半径的精确估计,接收器和卫星的时钟必须同步,可以通过复杂的分布式算法来降低接收器的时钟漂移。
定位基站使用各种精细调谐系数,可以提供额外的信息来纠正各种错误,比如电离层(50~500km高度)折射,它稍微扭曲了光的轨迹,并在电磁波实际路径和简化的直接路径之间引入了漂移。电离层的修正必须连续传播播放,因为几何问题是永久性的,虽然它属于缓慢、渐进的。GPS定位系统接收来自基站的修正,被称为差分GPS(DGPS)。
另一个常见的误差源是电磁波的掩蔽/反射,如果直接射线虽然被一个障碍物挡了下来,而反射波仍然到达了接收器,则间接路径的长度将会用于计算,这将导致估计位置的跳跃(差错)。低通滤波器通常用于最小化位置估计的任何突然变化。
常用的汽车GNSS传感器提供10m的位置测量精度。使用定位修正传输到接收者(DGPS),1m的精度很容易获得,而高端接收器如实时运动GPS(RTK)可以提供厘米级估计精度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





