结果演示了AUTOSAR开发周期以及使用AUTOSAR的跨域系统功能整合能力的实践。在AUTOSAR开发中的专业知识是通过运用AUTOSAR方法的所有步骤获得的,并从使用不同模板和系统配置开始。ASW组件通过ASW组件模板来描述。这样,就可以演示出ASW组件模板的可用性,且ASW组件独立于具体的硬件。
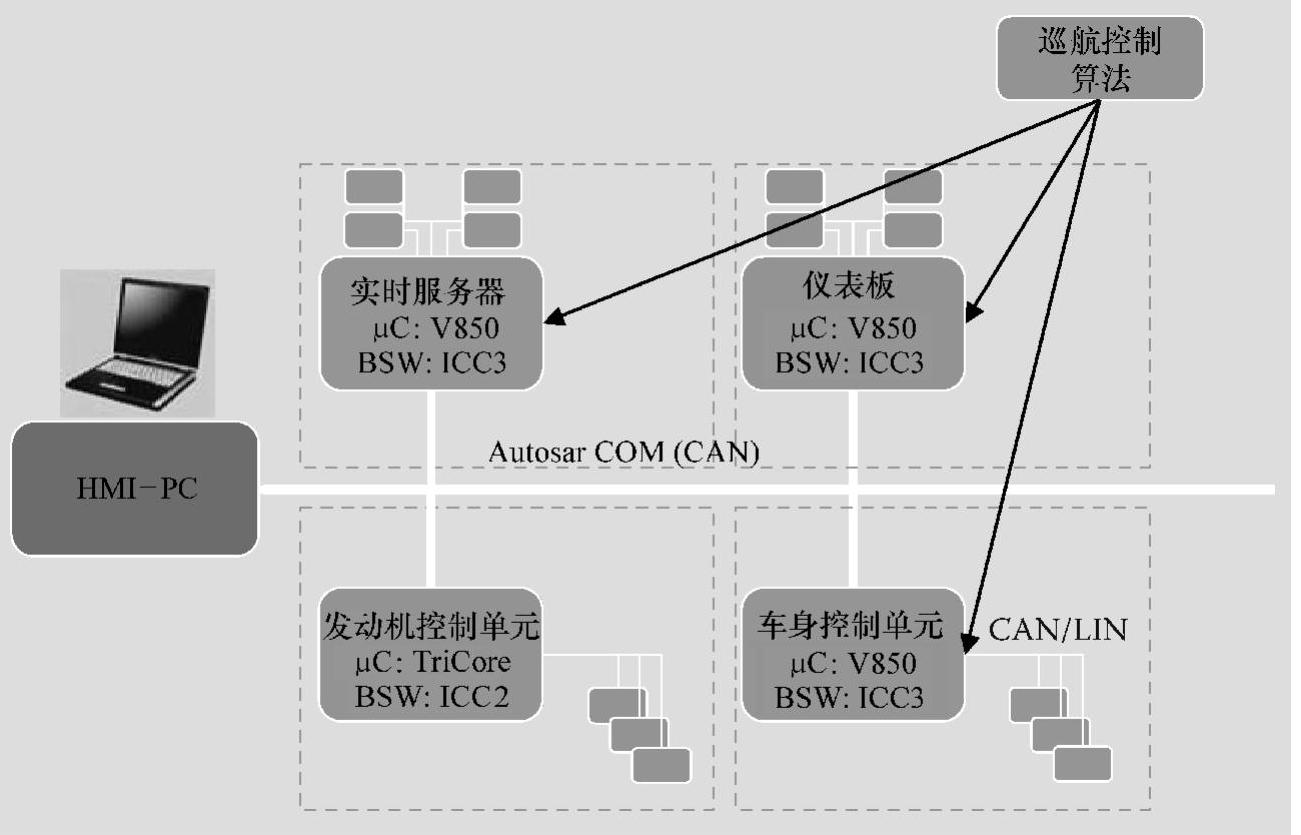
图2.12 巡航控制
这里,必须理解术语“可用性”,且不能仅理解为使用这样一个模板可以描述一个ASW组件。此外,它也表明,现有的控制算法和控制可以应用到AUTOSAR概念来描述一个系统。这个步骤的结果是符合AUTOSAR标准的ASW组件的描述和巡航控制算法、发动机软件和其他必要的ASW组件的约束描述。
指定了系统并在VFB层面上模拟。AUTOSAR的目标之一就是能够在一个独立于硬件层面上模拟ASW组件行为。这个工作是通过一个典型的仿真工具的仿真来实现的。这样的一个模拟可以使早期的集成和验证能够在模型层次上表现出来,例如,模拟需要运行发动机控制单元的所有的发动机和车辆传感器IO和作动器IO。这些组件在硬件在环(HIL)和在VFB仿真中进行了模拟,它们模拟了ASW组件和RTE。这使得两种模拟技术可以直接进行比较。
在这个虚拟集成完成之后,ASW组件映射到专用的、真实的硬件上,且与AUTOSAR BSW和某些额外的复杂的设备驱动程序集成在一起。为了显示巡航控制ASW组件实施的独立性,这个ASW组件可以映射到ICC3 BSW系统运行的所有3个ECU上。
BSW的实现基于AUTOSAR R2.0版本。在发动机控制单元上运行的软件都有具体的要求,它不包括在AUTOSAR R2.0版本的规范中。因此,在该ECU上运行的BSW包括AUTOSAR模块及非AUTOSAR BSW模块。总之,这种构造也显示了AUTOSAR概念适用于动力总成域。(www.daowen.com)
这种集成整合了BSW和ASW组件的配置,以及使用一个RTE生成器工具的具体目标硬件的RTE生成。
总结出通过实施显示的额外的概念:它显示了使用BSW和RTE的实施
•在不同的硬件平台上。
•对于模式管理,特别是在低功率模式下。
•对于AUTOSAR BSW和复杂设备驱动程序相结合。
这种实施也使得ECU之间的传感器和执行器的连接能够被转移。这可以当做一个可插拔的方案或作为一个部署方案来实施,即实施LIN和直接连接之间的转移。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





