车身域包含嵌入车辆上的功能,它们与动力学控制无关。如今,刮水器、车灯、车门、车窗、座位和外后视镜越来越多地受基于软件的系统控制。一般来说,它们不受严格的性能的限制,且从安全的角度来看,它们并不代表一个系统的重要组成部分。然而,一些功能(像一个先进的系统,其目的是控制对车辆安全的访问)必须遵守苛刻的实时约束。必须指出的是,车身功能往往涉及双方之间通信,因而带来了一个复杂的分布式架构。在这个域出现了基于低成本传感器-作动器级网络的子系统或类的概念,例如,LIN总线构造的机电一体化系统模块。还有一些功能可以和车门关联,如根据无线网络传输信号控制车门上锁/解锁、根据驾驶人或乘客要求控制车窗以及对外视镜和座椅位置进行控制等。这些功能的部署可能是这样的:一个电子控制单元(ECU)接收请求(锁定/解锁、车窗上/下、座椅向上/向下等),而物理设备(外后视镜、车窗、座椅)实现所要求动作的电动机控制器是由三个其他ECU支持(图1.2)。这四个ECU用LIN总线连接。由于一些请求涉及几个车门(如锁定/解锁请求),所以每一门主要的ECU也连接在(例如)低速CAN上。最后,为了把门的状态(门打开/关闭、车窗打开/关闭)呈现给驾驶人,信息通过CAN总线从主ECU传递到仪表ECU。
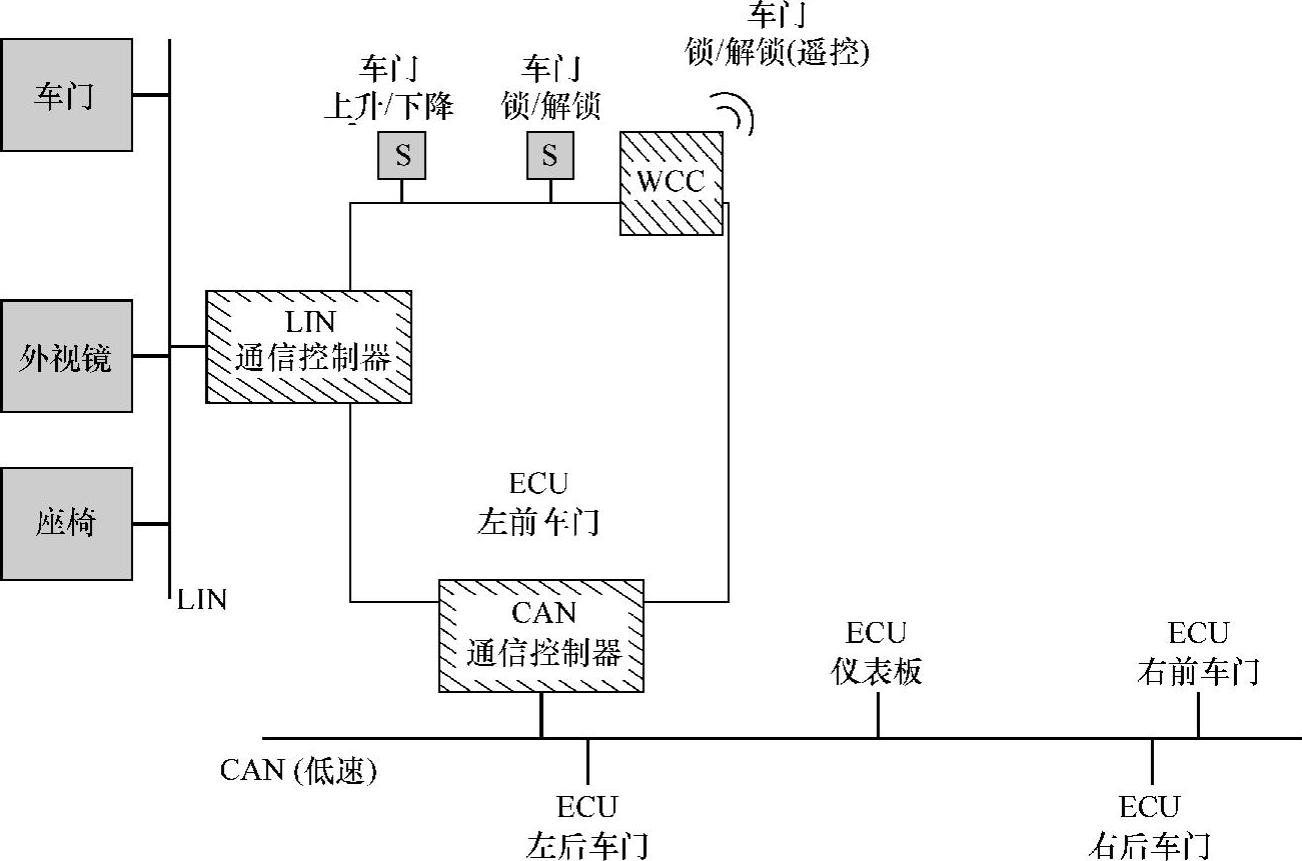
图1.2 车门控制及其布置的案例(www.daowen.com)
另一方面,车身域也包含一个中央子系统,被称为中央车身电子,其主要功能是确保消息在不同系统或域之间的传输。该系统是一个公认的关键中心实体。车身域的功能主要涉及离散事件的应用程序,且它们的设计和验证依靠如SDL的状态机器、状态图、UML状态转换图和同步模型。这些模型通过仿真,在可能的情况下通过模型检验,来验证功能规范。如前所述,它们的实施意味着这种功能规范分布在分层的分布式硬件架构上。中央车身电子的实体需要高的计算能力,且与前两个域相比,容错性和可靠性性能对车身系统来说是强制性的。虽然定时限制不如动力总成和底盘系统要求得那么严格,但考虑到硬件平台性能、每一个微控制器的调度策略和网络协议,必须评估刺激和反应之间的端到端的响应时间。事实上,设计师必须证明这些响应时间总是可接受的,且每一个刺激的反应是在有界区间内完成的。在这方面的挑战有:第一,能够对状态转换图进行一个详尽分析研究;第二,确保实施遵守容错性和安全性约束。这里的问题是在时间触发方法与灵活性之间取得平衡。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






