1.四轮定位仪简介
(1)汽车车轮定位的检测方法 汽车车轮定位的检测方法,有静态检测法和动态检测法两种类型。
1)车轮定位的静态检测法是在汽车静止状态下利用车轮定位仪对车轮定位进行几何角度的测量。
2)车轮定位的动态检测法是在汽车以一定车速行驶的状态下,用侧滑试验台检测前轮的侧滑量,以判断前轮前束和前轮外倾配合是否恰当。
(2)侧滑试验台检测原理 为了减少前轮纵向旋转平面接地点至主销轴线与地面交点的距离,并使前轴在承受较大载荷后前轮不致产生内倾,在前轮定位中出现了前轮外倾这一角度。但前轮外倾后,在两前轮滚动中出现了向外张开滚动的趋势。虽然在刚性前梁或车架的约束下,前轮并不能真正向外分开滚动,但两前轮分别给地面向内的侧向力和轮胎在地面上的滑动摩擦是实际存在的。此时,若使这样的汽车前轮在两块互不刚性连接然而可以左右自由滑动的滑动板上前进通过时,则可以看到两块滑动板向内靠拢。滑动板向内的靠拢量,即为该前轮的侧滑量。
前轮前束是为纠正前轮外倾后致使前轮向外张开滚动这一不足而出现的。当前束值恰到好处时,即给已经外倾的前轮一个合适的方向修正量时,前轮每个轮的瞬时滚动方向都会接近于正前方。此时,即使汽车前轮再通过同样的滑动板,滑动板也不会左右移动。若前轮前束值太大,则两前轮滚动中又会有向内靠拢的趋势。刚性前梁和车架不允许两前轮真正向内靠拢,但两前轮分别给地面一个向外的力并在地面上的滑动摩擦也是实际存在的。此时,若汽车的前轮通过上述同样的滑动板,则两滑动板向外滑动。滑动板的滑动量,即为该前轮的滑动量。
侧滑试验台就是利用上述滑动板在侧向力作用下能够横向滑动的原理来测量前轮侧滑量的。可以看出,检测中若滑动板向外移动,表明前轮前束太大或负外倾太大;若滑动板向内移动,表明前轮外倾太大或负前束太大;若滑板不移动,表明前轮没有侧滑量,则前束与外倾配合得恰到好处。
前轮外倾对滑动板的作用:不管车辆前进还是后退,其侧滑量相等且侧滑方向一致;前轮前束对滑动板的作用:在车辆前进和后退时,虽侧滑量相等但侧滑方向相反。
用同样方法也可测量后轮侧滑量。
在检测时,若滑动板的长度为1m,汽车以3~5km/h的速度平稳垂直通过滑动板,侧滑量为1mm,则代表车辆每行驶1km侧滑1m。按国家标准《机动车运行安全技术条件》的规定,用侧滑试验台检测前轮侧滑量,其值不超过5m/km。因此若检测车的侧滑量为0~3mm范围内,则表示良好;侧滑量3~5mm表示可用;侧滑量5mm以上为不良。
(3)四轮定位仪的分类 定位仪是一种测量汽车车轮定位参数的设备。检测前轮定位参数的设备称为前轮定位仪。汽车的操控性能不仅与前轮有关,后轮定位参数也很重要,检测前后轮定位参数的设备称为四轮定位仪。
四轮定位仪的测量方式及数据处理、数据传输方式随着电子技术的发展而不断变化,但是其基本测量原理大致是相同的,只有采用的测量方法(或使用的传感器的类型)及数据记录与传输的方式不同。
1)按通信方式的不同分类
①有线通信:传感器通过电缆把测量数据传送到主机,有线数据传输可采用的技术有很多种,采用何种技术主要取决于性能价格比等因素。其主要特点是传输可靠,成本低廉。
②无线电通信:通过无线电通信技术把传感器测量数据传送到主机(待传输数据经调制后以高频无线电波为载波向周围空间发送。它所采用的无线电频段一般是433MHz)。与红外线传输相比,无线电传送具有传输无方向性、传送距离远、受障碍物影响小等优点,其主要缺点是成本较高。
③红外无线通信:红外线无线传输技术是把需要传输的数据经过调制后经由红外线载体发送,红外线接收器在接收到调制的红外线信号后经过解调恢复传输数据。由于红外线具有方向性,因此红外线的传输也具有方向性,而且存在不能被遮挡、传输距离不远等缺点。其主要特点是技术简单、成本低。但由于红外线传输具有方向性,因此红外无线通信与蓝牙通信比较,有怕强光、怕阻挡等不利因素。
④蓝牙无线通信:bluetooth是1998年5月由爱立信、IBM、英特尔、诺基亚、东芝5家公司联合制定的近距离(10m内)无线通信技术标准(2.4GHz),它是由无线电波做载体进行数据交换。蓝牙通信的标志是采用蓝牙通信协议,硬件上采用蓝牙模块,效果上抗干扰能力较强。
从以上可以看出,蓝牙通信仅仅是众多通信方式中的一种,它不是测量方式,并不影响测量精度,也不是衡量一台定位仪优劣的主要指标。
2)按测量方式的不同分类
①拉线式角位移传感器:该传感器实际上是一只精密可变电阻,在轴的带动下,产生电压的变化,通过模拟量到数字量的转换,形成相对转动角度信号。
②重力锤式倾角仪:它实际由两部分组成,即锤部分和电子部分,由于重力的作用,锤始终垂直于大地,带动电子部分产生角度的相对变化。
③电子式倾角传感器:它是一种高科技产品,该倾角传感器有多种形式,如电容式、磁阻式、重力式等几种,全为非接触测量产品,根据原理不同,其性能也有较大差异。
④激光与光电接收板+电子式倾角传感器
a.激光:激光是作为测量系统的光源(激光发射器)而应用于四轮定位仪的,与其他光源相比,它具有单色性好,方向性强,光亮度极高的特点。因此,激光光源可以实现以较小的功率,测量较远的距离,由于其单色性好,因此它可以避免环境光对测量系统的干扰。但激光测量的精度较低,且对人体有害。
b.光电接收板:在四轮定位仪中与激光配合使用的接收器,为光敏元阵列,而不可以用PSD和CCD。因为激光的光斑均匀性差,且具有干涉和衍射的特性,不利于PSD和CCD的接收。
⑤红外线与PSD+电子式倾角传感器
a.红外线:红外线是自然界普遍存在的光源,它的本质也是光,只不过这种光肉眼不可见,用于四轮定位仪的红外发射管是一种半导体器件。红外线在四轮定位仪中的通信系统和测量系统均可使用。红外线用于通信系统是作为通信的载体,它采用调频的方式。应用于测量系统时,红外线作为发光源提供给CCD或PSD使用。由于红外发射管光斑均匀(特点),因此CCD或PSD的光源必须使用红外或可见光,而不能采用激光。红外线通信与蓝牙通信比较,有怕强光、怕阻挡等不利因素,因此对环境要求较高。
b.PSD:又称光电位置传感器,它是一种光电转换器件,当PSD的受光面某一位置存在光照的情况下,其输出电流会有相应变化,将光敏面上的光点位置转换成电信号,它是一种模拟器件(输出的是模拟信号)。PSD测量方式的测量范围相对比较窄,且受环境光及温度的影响较大,因此,PSD产品的精度和稳定性较差,需要经常对设备进行校正。
⑥红外线与CCD+电子式倾角传感器(https://www.daowen.com)
CCD又称光电耦合器件,是20世纪70年代初发展起来的新型半导体集成光电器件。CCD元件为数字元件。应用在四轮定位仪上的CCD一般为线阵结构,由几千个相对独立的像敏单元以13~14μm的相邻距离均匀分布在一条直线上形成线阵。光线照射到像敏单元产生信号电荷,信号电荷在外部脉冲的作用下直接输入传感器的微电脑处理器进行处理,从而准确地计算出入射光的角度以及前束角度。由于CCD上像敏单元分布均匀,其线性度好,因此,CCD产品具有测量精度高,无温度系数,使用寿命长等诸多优点。
元征公司的X⁃531四轮定位仪由红外发光管+CCD传感器+倾角传感器+无线电射频通信模块组成,其数据传输更加稳定可靠,是所有2D四轮定位仪产品中精度最高、性能最可靠、技术最先进的。
⑦红外线与CMOS图像传感器。CMOS是互补金属氧化物半导体的统称,应用于四轮定位仪产品的是由COMS做成的图像传感器。首先,CMOS图像传感器的动态范围远比CCD差。其次,CMOS图像传感器的分辨率低,最多也不过640线,因此精度比CCD要低。再次,CMOS图像传感器对环境的光线要求较高,太明或太暗时就不能正常工作。
⑧蓝牙与CCD+电子式倾角传感器。蓝牙通信不怕阻挡,不怕光,数据吞吐量较大,但怕强无线电干扰(比如2003年的太阳黑子对整个世界的无线电通信都造成影响),另外由于其历史短,成本较高。
⑨3D技术。3D(3Dimension是三维立体的意思)定位仪由高分辨率的摄像机将各车轮的立体姿态信息送给电脑,然后计算各车轮相对于测量系统的位置关系和角位置关系,最后计算车轮的定位参数。
3D测量方式的基本测量原理是采用图像识别技术,用面阵CCD数码相机采集装在车轮反光板上的图像信息,以测量出车轮的各种定位参数。3D的优点是取代了传统的装有高精度光学电子装置的传感器,仅用一块反光板做靶标。
3D图像定位仪的测量装置由高分辨率CCD摄像头、反射光板构成。每个车轮上装夹一个带特定反光斑的反光板,因为CCD焦距的缘故,必须使每个反光板对应一个相应焦距的CCD。电脑内要安装图像采集卡,在使用时,电脑还要取得举升机的高度信息,以便得到正确的计算结果。
电脑首先将汽车举升到规定的高度,然后分时逐个选通各个CCD,并采集CCD送来的图像信息,计算机根据所采集的图形信息计算各定位角度。其测量原理是计算各个反光板的二维角坐标(对应于前束、外倾,如图1⁃65所示)、反光板中心在CCD中的坐标以及到对应CCD的距离,而四个CCD在选定的三维坐标系中的坐标是固定不变且已知的,这样,各反光板中心在该坐标系中的坐标就可以求出。于是各反光板的相对位置就可全部求出,也就能求出车辆各车轮的参数,如前束、外倾、退缩角等。主销参数的测量方法与其他定位仪的测量方法相似。
3D影像定位仪的测量部分使用高分辨率的面阵图像传感器(面阵CCD或数码相机),而原来的机头由一反光板代替,反光板上有按一定规律排列的反光斑,用图像传感器观察反光板,根据其反光斑的位置及大小计算各车轮的位置参数。若车轮外倾时,反光板在CCD的视野中绕视野中心轴线旋转,各反光斑的上下左右位置均发生变化,只要先求出各反光斑的中心点的位置,再根据解析几何的原理就可计算出这些反光斑旋转了多少角度。
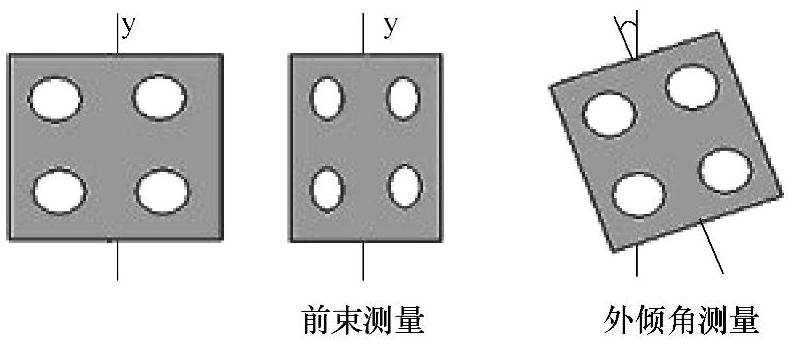
图1⁃65 3D影像定位仪测量原理
由于测量距离不能与事先调整的对焦距离完全相等,图像不清晰,计算精度就要打折扣,所以这种定位仪在测量时要求轻轻推动车辆前后移动若干距离以得到不同姿态的多次测量。
该定位仪主要的问题是精度问题,由于CCD的焦距与反光板到CCD的实际距离可能因车型不同而相差较远,聚焦就成为影响测量精度的最大障碍。加之由于该类CCD成本较高,设计者还希望在每侧只使用一个CCD,焦距问题就更突出了。如果采用自动聚焦,但调整聚焦的成像对象不够理想,而且自动聚焦本身也会带来测量误差,因此要选择更高分辨率的CCD才能解决问题,所以这种定位仪目前还不适宜大批量普通用户。
图1⁃66所示为百斯巴特四轮定位仪。

图1⁃66 百斯巴特四轮定位仪
2.四轮定位的调整过程
1)两轮调整法节省时间、操作简便、设备要求低,被许多修理厂使用。然而,它的工作效率完全依赖于所修汽车是否有两平行轴,且前后轮是否在同一直线上。图1⁃67所示为计算机的前轮前束数据分析。四轮调整法则更多依赖于计算机技术,它对调整过程进行实时检测,该法是以后轴的中心线为基准来调整四轮的转向角,同时使用计算机系统进行计算。因此可以容易地确定出转向轮的中心并进行调整,从而确保汽车在直线行驶时转向轮保持平行。
2)检查配重和倾角是否正确。图1⁃68所示为计算机的前轮外倾数据分析。一些操作不规范的维修企业,为了追求竣工速度和时间,在对事故修复车进行四轮定位时,往往会忽视车辆自重状态。如维修时,车身大梁拉伸、整形和校正都结束之后,油漆工对车身内表面的涂装也完成,机电工整装发动机、变速器、悬架系统,起动后马上进入四轮定位程序。这样,很多时候发动机罩、风窗玻璃、保险杠甚至座椅都没安装,就开始四轮定位操作了。他们只关注是否跑偏、翘曲等问题。如果前后轮轴距基本正常,就会检验主销倾角、车轮内倾角、车轮前后束等。发现问题就强行硬改零部件以求达标,虽然事故的碰撞修复是允许个别甚至几个点位参数存在±3mm的误差,但由于车身自重不对,倾角就会有变化,不达标时,一些所谓“经验丰富”的修理工就会锉改螺钉固定孔来校准四轮定位参数。图1⁃69所示为桑塔纳轿车的倾角调整。
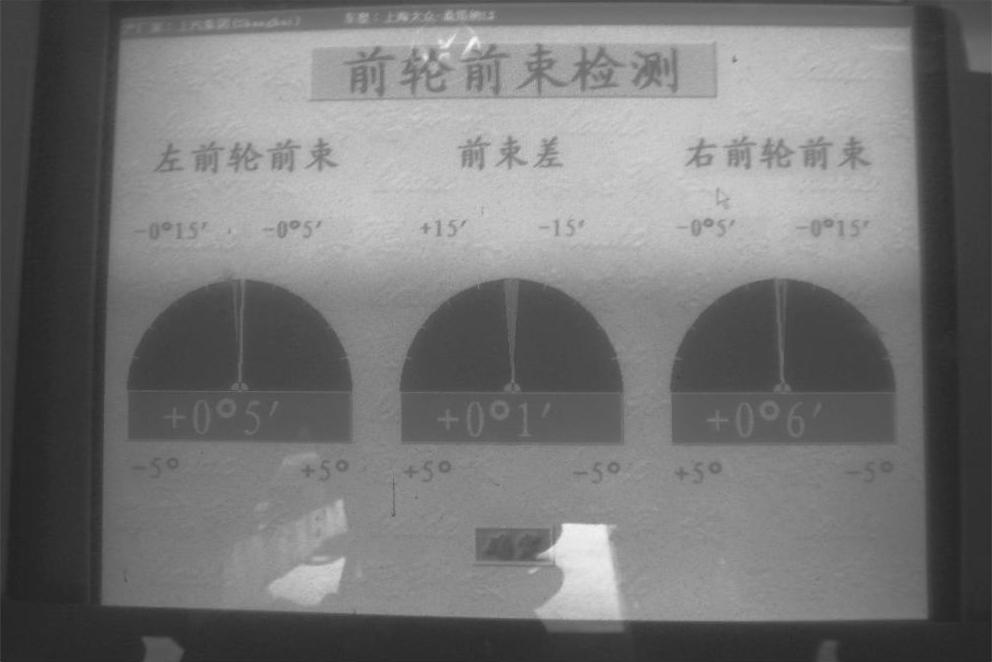
图1⁃67 计算机的前轮前束数据分析
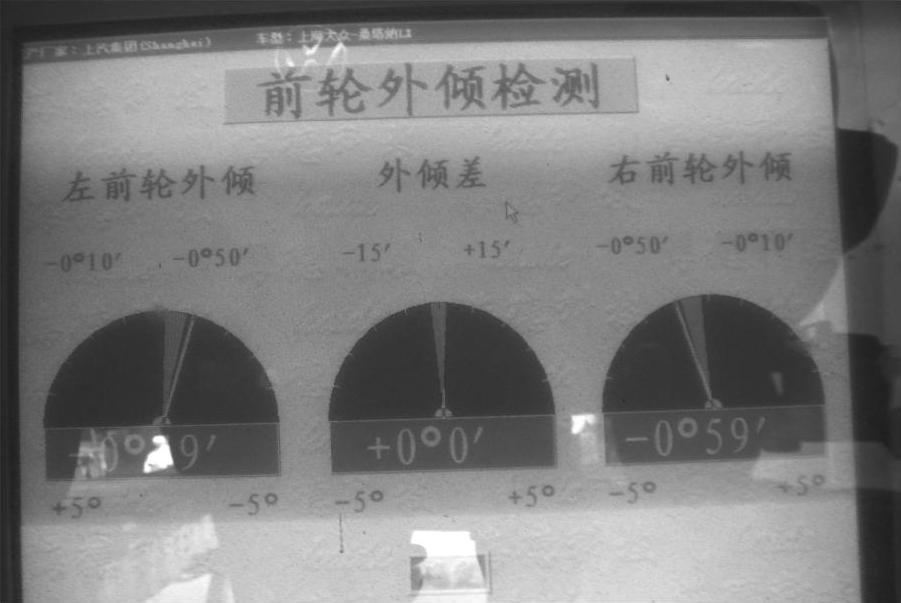
图1⁃68 计算机的前轮外倾数据分析
这样的结果只能是当时没有装配完好的修复车辆能临时上路,可能会有较好的状态。而当整体修复装配竣工后,再以各种车速、在各种路况上进行路试时,问题又会显现出来。偶尔也有当时没问题的,出厂后正常使用不久又出现问题的车辆。没有根治的四轮定位问题一定要彻底解决。还要注意承载状态,如车辆进入四轮定位仪支架后,驾乘人员没有全部下车,有时甚至行李箱内还有较重的物品,这样定位的结果与前者相似。前者是配重不足,后者则是配重严重超出车辆四轮定位时的自重要求。
总之,如使用先进的设备、科学的手段和技巧进行四轮定位,就能够避免在行驶中的跳动转向、力矩转向、左右牵引、转向器摆振、转向盘不能自动回正、垂直舒适性差、车身倾斜、行驶中异响及行驶事故造成的转向沉重等问题出现。

图1⁃69 桑塔纳轿车的倾角调整
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




