【摘要】:7)单纯的液压指令改变小臂主滑阀,然后机电控制器发出指令改变P2可变再生电磁控制阀及小臂,这使得从小臂活塞杆回流的油能循环使用。
1.控制系统
小臂回收可变再生控制如图7-5所示。
2.再生控制
1)小臂回收作业时,二级控制压力使小臂滑阀发生改变,并被导入低压力传感器。
2)当小臂滑阀发生改变时,负控制压力也随之改变并被输入负控制压力传感器。
3)负控制压力传感器的电压输出被送入机电控制器,并对负控制信号进行处理,同时根据电压输入值向P2泵电磁控制阀输出电流指令。
4)P2泵电磁控制阀根据机电控制器发出的电流指令输出二级控制压力,并改变P2泵的流速。
5)小臂回收低压传感器的电压输出被输入机电控制器并对其控制信号加以处理,同时根据电压输入值,向可变再生电磁配合阀送出电流指令。(www.daowen.com)
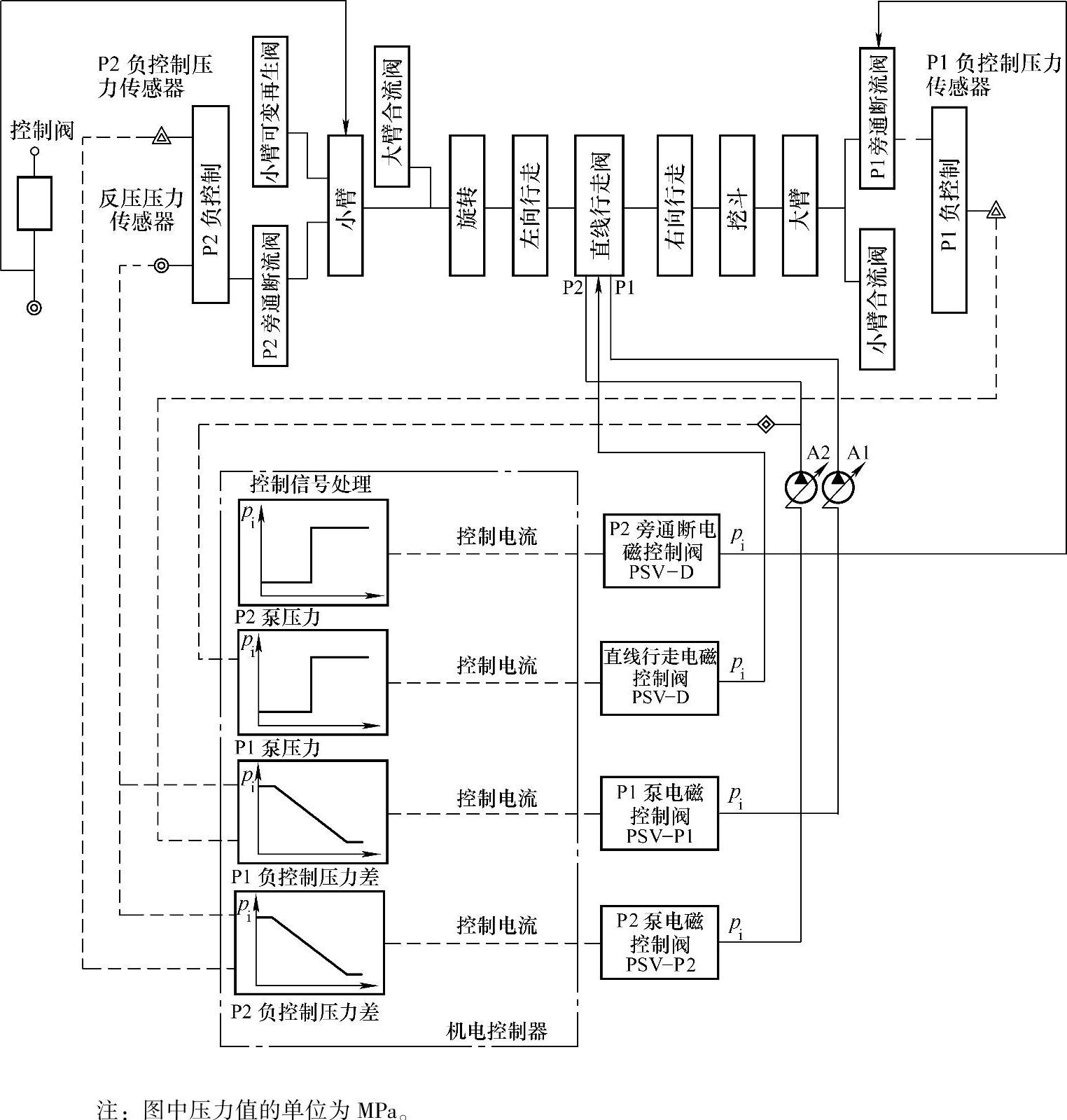
图7-4 小臂顺序合流控制
6)小臂回收可变再生电磁配合阀根据接收到的电流指令输出二级控制压力,并改变小臂可变再生电磁配合阀。
7)单纯的液压指令改变小臂主滑阀,然后机电控制器发出指令改变P2可变再生电磁控制阀及小臂,这使得从小臂活塞杆回流的油能循环使用。
3.再生断流控制
1)小臂回收作业时,如果P2泵压力上升至一定高度,机电控制器感知高压传感器的电压输出,并对控制信号加以处理,同时向小臂可变再生电磁控制阀输出减压电流指令。
2)当二级控制压力根据机电控制器所发出的电流指令标准下降时,小臂可变再生电磁控制阀被切换至断流位置。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







