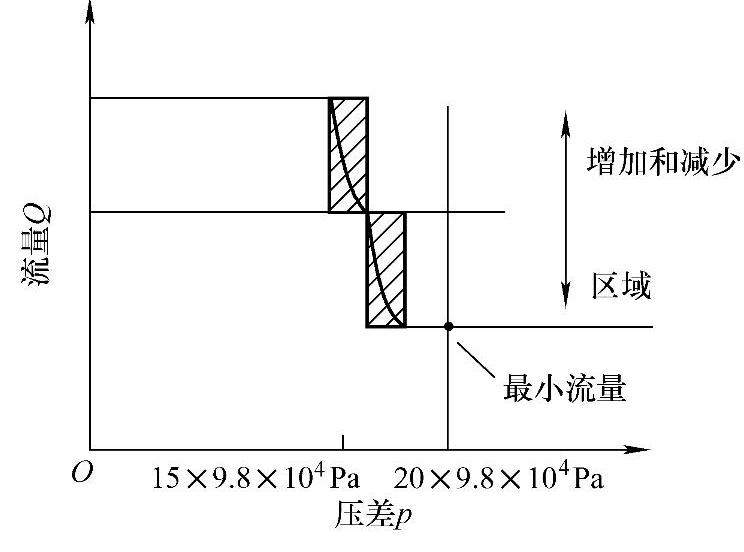
图5-7 压差控制曲线
1.负荷传感系统
负荷传感系统由可变柱塞泵、有最大负荷压力传感线的控制阀及卸载阀所构成。
该系统使控制阀两边的差压保持一定,调节泵流量使泵输出压力经常维持在操作中的液压缸(马达)输出压力之上。
由此,按每个液压缸(马达)操作的需要,得到适当的泵流量,既节省了能源,又进一步改进了挖掘机的微动控制性。
来自操作油箱的油由泵输出后,流至控制阀和差压传感器。然后一方面经过可变压力补偿阀流至各个主阀槽内,另一方面则流至卸载阀。
2.操纵杆中立时的油路
由主泵出来的油被控制阀内的主滑阀堵住。系统内的油压逐渐增高,直到超过卸载阀内的弹簧力(卸载阀的设定压力是20×9.8×104Pa)时,卸载阀打开,使油流回油箱内。
由主泵出来的油不断地流到A口,当回油路内的油压通到差压传感器(DP传感器)的B口时,两口间就产生差压。
当卸载阀的设定压差为20×9.8×104Pa,而差压传感器内的压差超过15×9.8×104Pa时,差压传感器把指令电信号送至高速电磁阀,通过PVC把泵的斜角减少至最低流量,由此,操纵杆中立时的泵流量也变为最小,如图5-7、图5-8所示。
3.操纵杆单独操作(缸移动中)时的油路
由主滑柱塞出来的油通过控制阀内的可变压力补偿阀流入缸。一方面,从主滑柱塞分流出来的油通过梭动阀,经调节阀a流至差压传感器中的B口及卸载阀F口。
泵输出压也作用在压差传感器的A口。油通过控制阀后压力损失,使作用在B口的压力下降。因此,A口的油压经常要比差压传感器B口的压力高些。
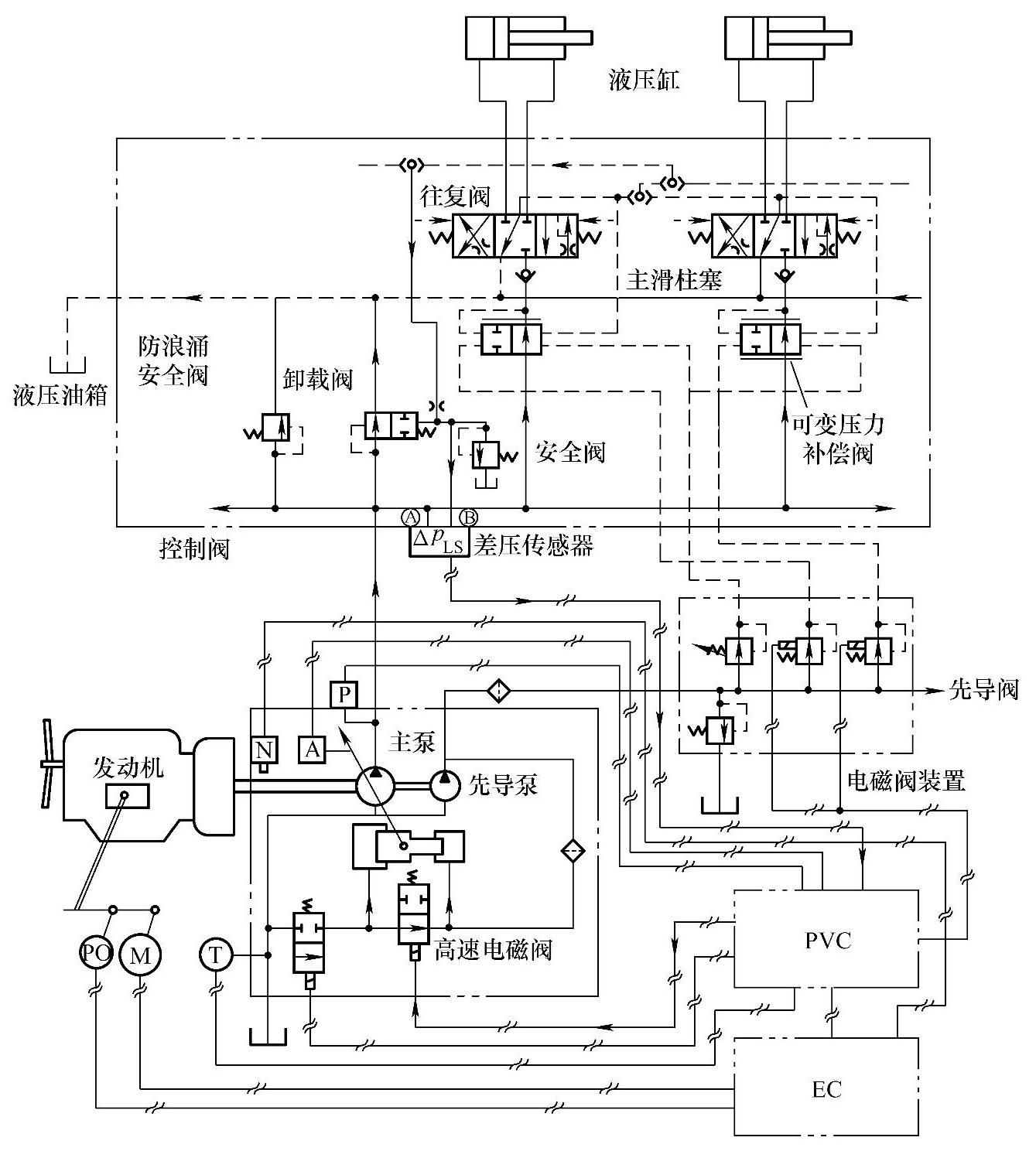
图5-8 操纵杆中立时泵控制液压图
当A、B口之间的压差低于15×9.8×104Pa时,差压传感器把电信号送至PVC,并指令高速电磁阀把泵斜盘倾角调整至最大流量方向,泵流量随之增加。
当操纵杆移回中立位置时,控制阀内的开口面积随着主滑柱塞的移动量缩小,提高回路内液压油的流动阻力。
当A、B口之间的压差超过15×9.8×104Pa时,高速电磁阀控制泵调节器使泵斜盘倾角变成最小流量的方向,并使泵流量减少,如图5-9所示。
4.系统溢流压力时的油路
当操作操纵杆,工作回路的压力超过该系统的溢流压力时,在液压缸到达行程末端之后,如果继续操作操纵杆,工作回路的压力就增加。另外,当来自主泵的压力作用在卸荷阀上,克服了卸荷阀设定压力与卸荷溢流阀设定压力之和(pm1+pm2)时,卸荷阀打开,把主泵输出的油直接排回到液压油箱,如图5-10所示。
因为压力(pm1+pm2)作用在差压传感器的油口A上,所以油口A和B之间的差压pm1就大于规定值,这样主泵的排量就降到最小。与此同时,来自P传感器的电信号(流量切断控制信号)使流量进一步减小。
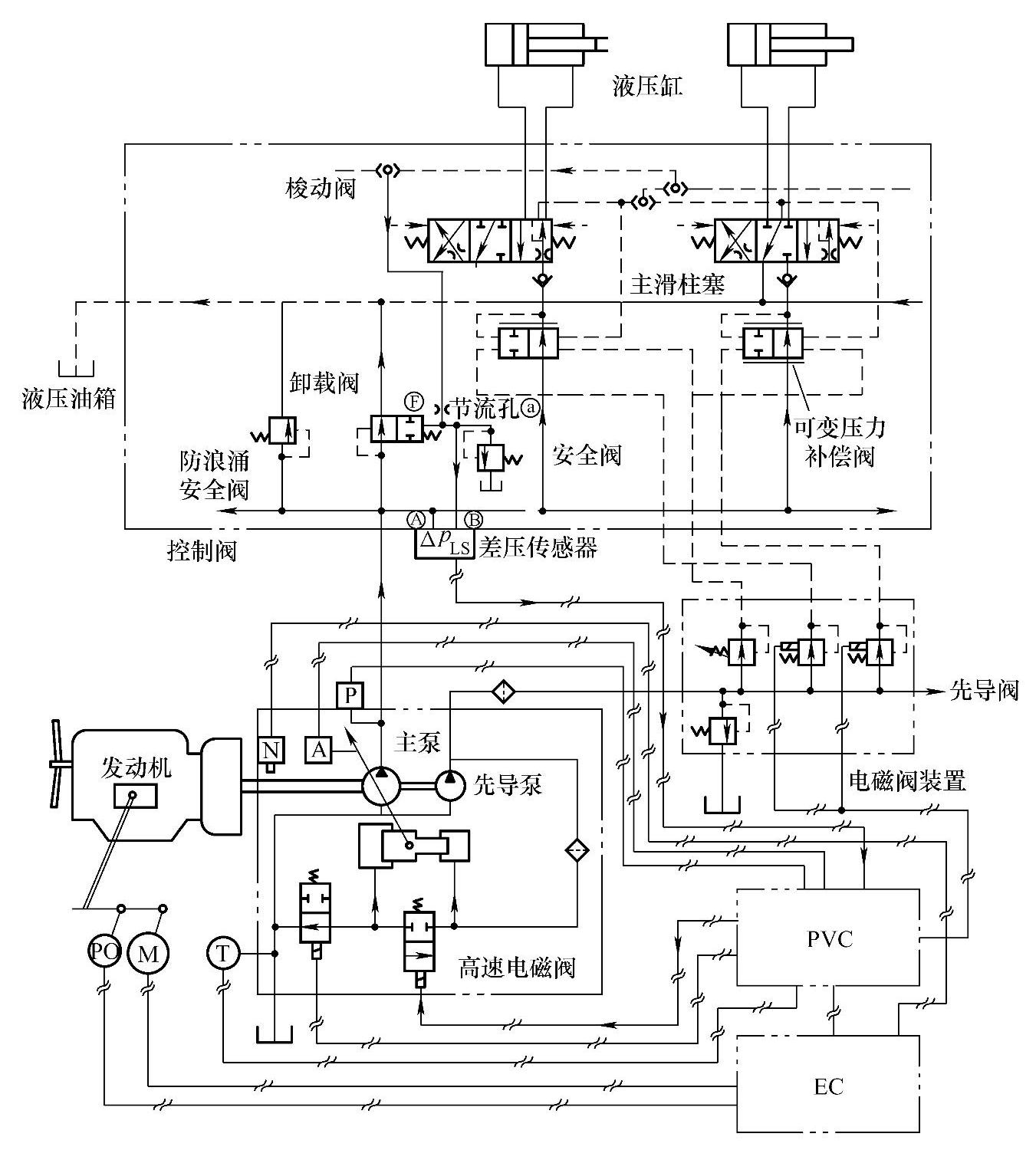
图5-9 操纵杆单独操作时泵控制液压图
5.速度传感系统
若将动力选择开关设定在“E”和“P”之间,则速度传感系统控制发动机操作速度,使其符合输出的转矩限度,控制液压泵驱动转矩,得以有效利用发动机输出的转矩或避免发动机失速。
发动机驱动液压泵,当发动机转速比额定转速快时,就表示发动机输出转矩已足够驱动液压泵。这种情形下,泵斜盘倾角增加,使发动机输出转矩被有效地利用。
使用低级燃料油或在高地挖掘操作时,发动机输出转矩会减小,所以如果液压泵驱动转矩预先设为一定数值且超过发动机输出转矩时,发动机就会失速。发动机转矩曲线如图5-11a所示。(www.daowen.com)
为了避免发动机失速,必须调节泵斜盘倾角来减小泵的驱动转矩,泵转矩曲线如图5-11b所示。
PVC根据发动机操作速度自动地控制泵驱动转矩。
图5-11表示泵驱动转矩的理想情况,而发动机输出转矩重置情况如图5-12所示。
6.速度传感系统
发动机转速传感器(N传感器)把传感信号传递到EC,控制发动机的实际操作速度。动力选择开关选择“开”时,指令信号就传递到EC。当发动机实际转速超过动力选择开关选择的指定发动机转速时,EC就检出两者的速度差,并把控制信号传送至高速电磁阀,通过PVC增大泵的斜盘倾角,直到发动机速度变为指定转速。
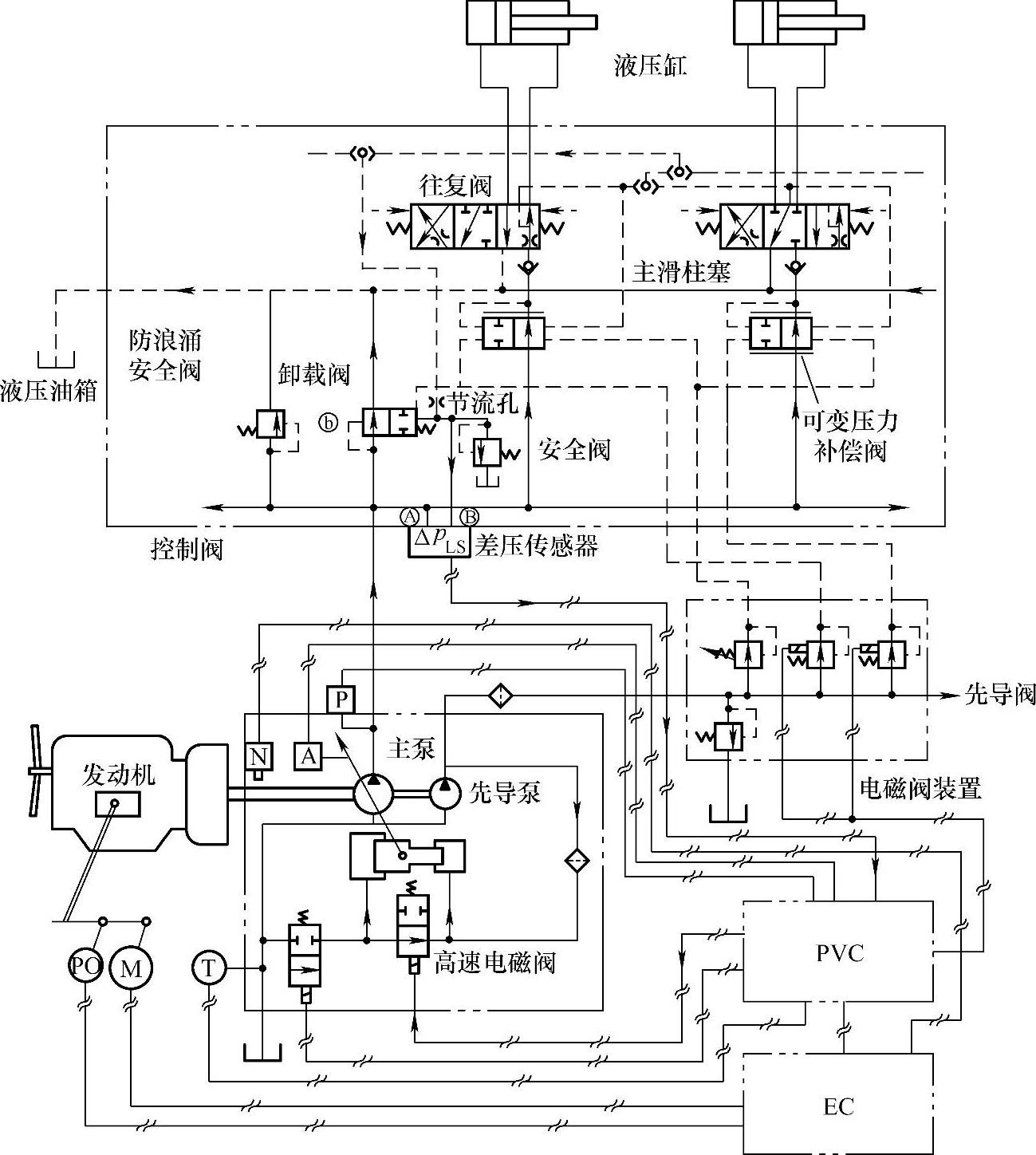
图5-10 操作操纵杆,工作回路压力超过该系统溢流压力时的泵控制液压图
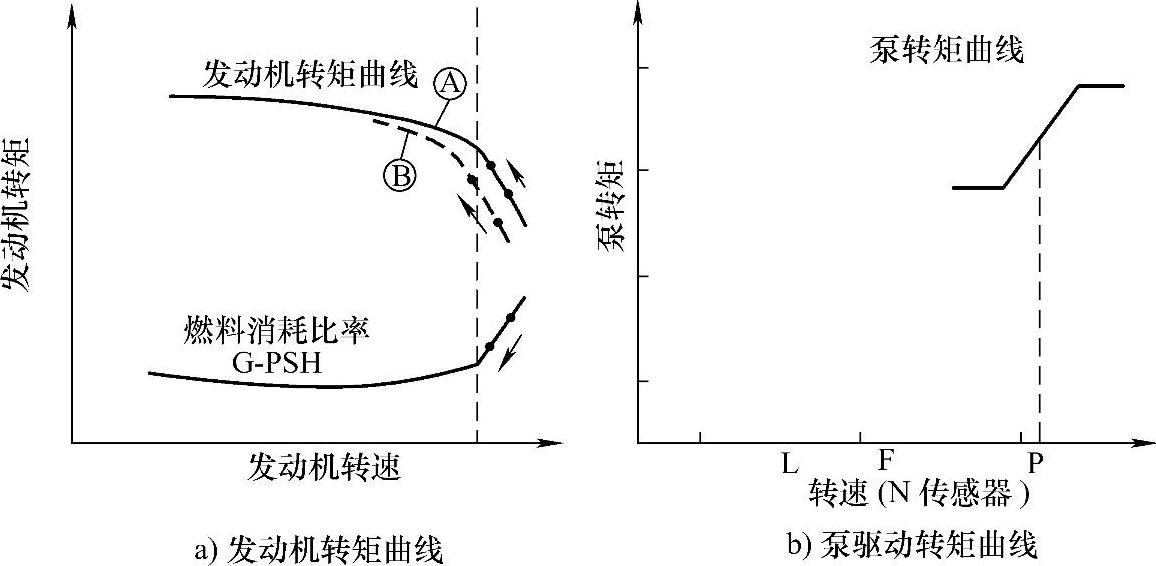
图5-11 发动机、泵转矩曲线
挖掘机使用较差的燃料或在海拔高的地方工作时,发动机的实际转矩减小的情况如图5-13所示。在这种情况下,发动机转速将显著地降低,但是,适当控制泵的斜盘倾角,可减轻发动机转速的下降程度。
当发动机实际操作速度低于动力选择器选定的指定发动机转速时,EC检测出该转速差,指令高速电磁阀通过PVC减小泵斜盘倾角,直到发动机转速正常。
配合发动机出力转矩控制泵的斜盘倾角,可避免发动机停止或转速突然降低。图5-14以泵p-Q(压力-流量)曲线说明速度传感动作。
发动机实际操作转速若大于指定转速,则泵驱动转矩增加,而其p-Q曲线就如图5-14中虚线所示;反之,发动机实际转速小于指定转速时,其p-Q曲线也就如图5-14中点画线所示。
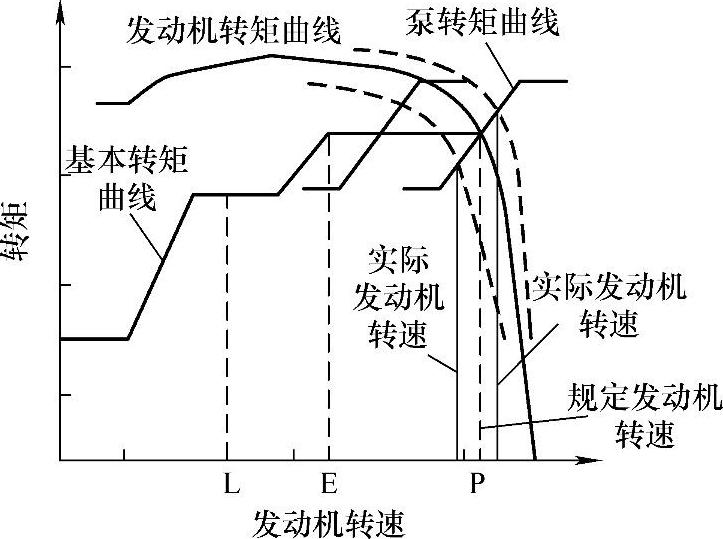
图5-13 发动机转速与转矩关系曲线
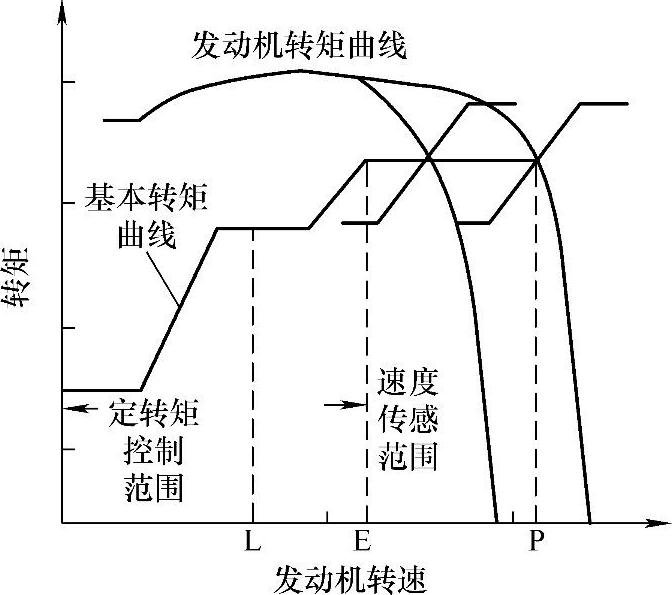
图5-12 发动机输出转矩重置情况
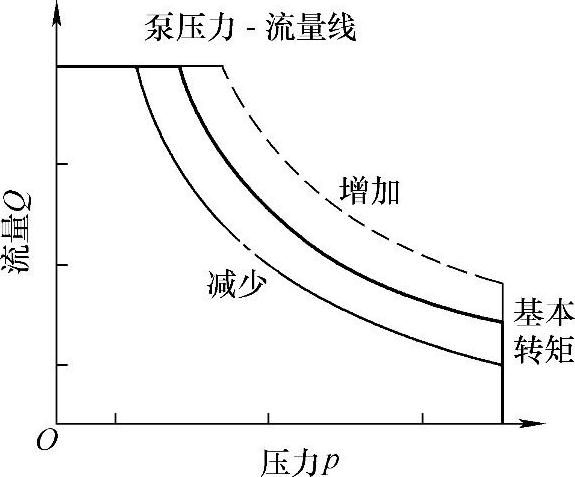
图5-14 压力-流量曲线
低于E点时,速度传感系统是无效的,而是以一定的转矩动作来控制泵的驱动转矩。
7.分流控制系统
分流控制系统能以一台泵的液压油有效地同时使各个执行机构在不同的负荷油压下发挥很多液压功能。系统内泵的动作和可变压力补偿阀全由PVC(泵阀控制器)控制。
例如,动臂缸和小臂缸的油压分别为100×9.8×104Pa和50×9.8×104Pa时,在小臂缸操作中起动动臂缸,主泵的油均等地分别流经控制阀内的可变压力补偿阀,通过主滑柱塞流入各功能执行机构。
动臂缸起动之前,差压传感器检测差压的大小后,正确地控制小臂缸的液压油供应量。
动臂缸起动时,动臂油压通过动作阀引进差压传感器内,油口A及B之间的差压就变成0MPa。
差压传感器把压差低于15×9.8×104Pa的信号传送至PVC,而PVC把控制信号传送至高速电磁阀去变换泵的斜盘倾角,使泵的油流量增至最大流量。
泵油流量增大,液压油有流向压力较低的小臂缸内的趋势。PVC把控制信号送至比例电磁阀,用可变压力补偿阀控制流入小臂缸的油流量,使泵输出油压增大至足够动臂缸开始操作。分流控制时泵控制液流图如图5-15所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







