1.概述
作业模式是根据作业种类选择最佳运转条件的模式,有挖掘(DIGGING)、装车(LOADING)、整地(LEVELLING)和提升(LIFTING)四种模式。作业模式是用监控器上的软按键来选择的。
挖掘机作业模式选择的控制原理如图3-6所示。
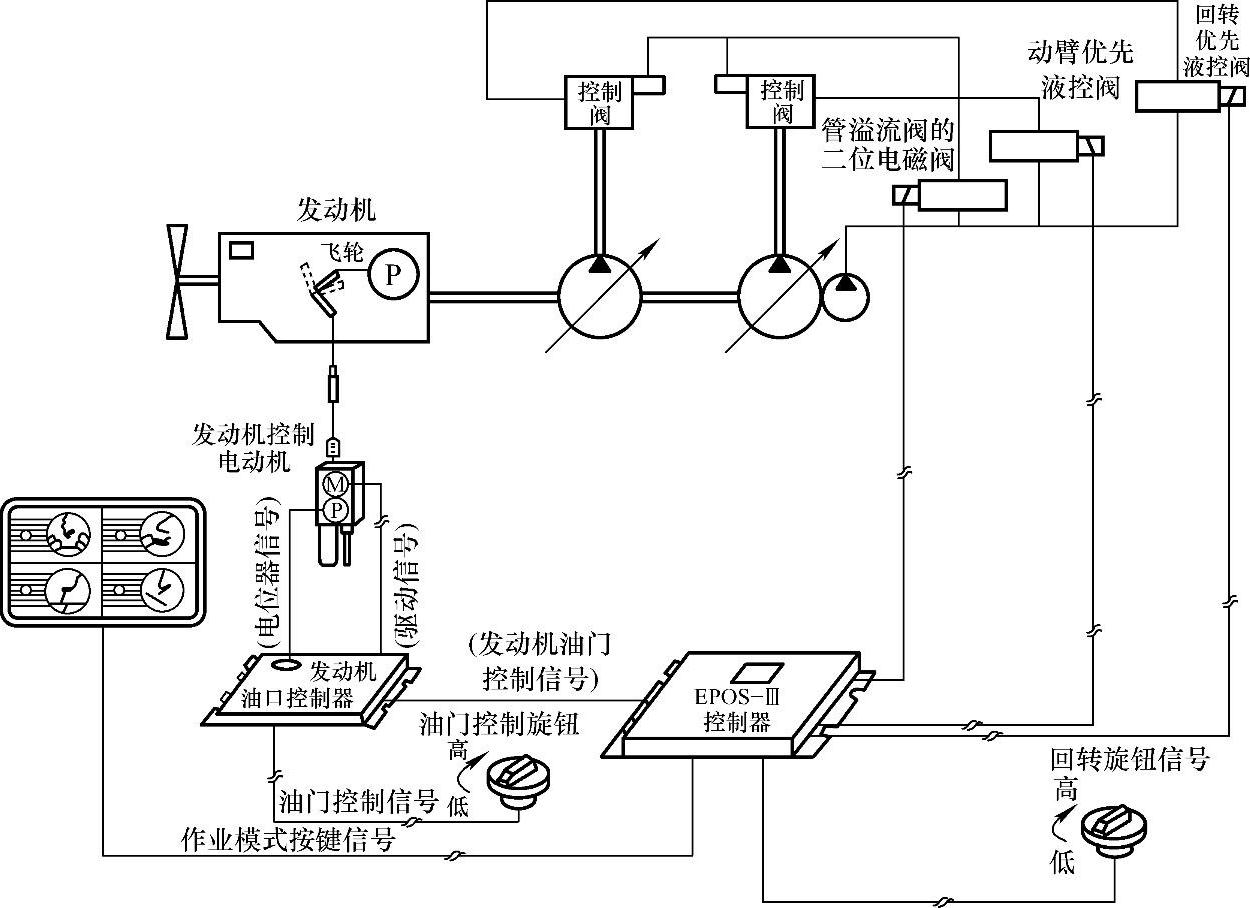
图3-6 挖掘机作业模式选择的控制原理
发动机起动后,便自动设定为挖掘模式,当驾驶员根据作业要求,按下监控器上面的软按键来选择相应的作业模式时,斗杆、动臂、铲斗的速度以及溢流阀溢流压力、发动机的转速等都自动地设置为最佳数值。另外,座位右侧的台子上有回转速度调节旋钮,旋转它可以调节回转、动臂、斗杆的速度,可以在不同作业现场、不同回转角度、不同挖掘深度、不同装车高度进行最佳复合作业。
按下各作业模式的按键后,相应的指示灯亮。
对于履带式挖掘机,回转速度、动臂速度和发动机转速是通过与其相对应的优先比例电磁阀(EPPR阀)来控制的。调整优先比例电磁阀的输入电流(100~800mA),即可使比例电磁阀的输出压力从0MPa调高至4.8MPa,该压力控制相应的主换向阀的阀芯开度,最终控制执行机构的工作速度。
2.挖掘模式[pBP设定值为1.5MPa(400mA),斗杆挖土(往里收回)+铲斗挖掘复合动作]
挖掘模式控制原理如图3-7所示。
挖掘模式的标准作业状态是斗杆往里收回(挖土)+铲斗挖掘(也往里收)的复合动作,有时稍提升动臂。pBP(动臂优先比例电磁阀的液压压力)设定值为1.5MPa(400mA),这个压力供给到主控制阀BP(动臂优先阀)上,使并联回路的通路变窄(节流功能)。由此,斗杆的动作和铲斗的动作相平衡,成为标准作业状态。
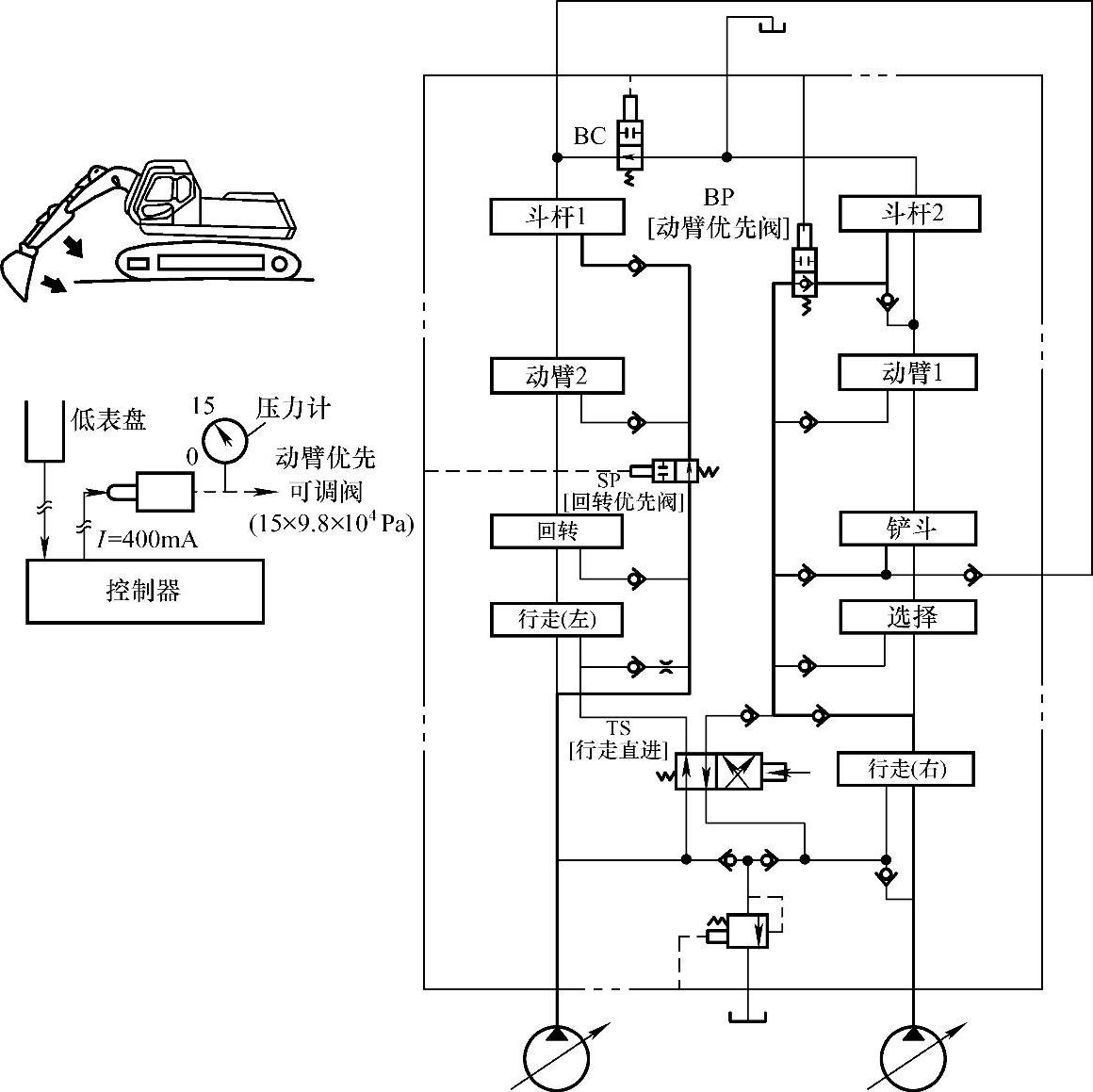
图3-7 挖掘模式控制原理图
如果供到主控制阀BP的二次压力比pBP规定值(1.5MPa)高,则斗杆的速度比铲斗(或动臂)的速度慢一些;如二次压力比规定值低,则斗杆的速度变快。只有在进行复合动作时,才符合上述情况。
3.装车模式[pBP设定值为2.9MPa(600mA),pSP设定值通过回转旋钮可调]
根据回转角度和装车高度,用回转调节旋钮调整回转可调阀的通油面积,可使回转和动臂提升速度的比率达到最佳。在监控器仪表盘上,按下装车作业模式按键,则动臂优先比例电磁阀得到最大电流,比例控制阀将输出最大压力推动动臂优先可调阀,切断其通路。在这样的回路状态下,同时进行回转、动臂提升和斗杆卸土(外翻)三个动作。(https://www.daowen.com)
左边液压泵排出的油受到回转优先可调阀的节流,优先供给回转马达,确保回转速度,没用完的油将通过回转优先可调阀节流后供给动臂和斗杆。然而,动臂提升负荷压力比斗杆卸土负荷压力高,因此通过节流后过来的油大部分供给斗杆,而动臂几乎得不到供油。
由于动臂优先可调阀切断了斗杆的供油路,因此右边液压泵排出的油全部供给动臂。万一动臂优先可调阀没有切断其油路,则油将流向负荷压力低的斗杆,因此动臂将不能提升。在整地模式中,动臂优先可调阀的通油截面积变得最大,因此,在整地模式下进行装车作业并且同时进行三个动作时,动臂将不能提升。
4.整地模式(pBP设定值为0MPa)
整地模式是使动臂提升和斗杆挖土(往里收)的复合动作模式,是使铲斗的齿刃部分水平移动来平整地面的作业模式,其要求斗杆收回速度快,动臂提升速度慢。在这个作业模式下,动臂提升负荷压力虽然比斗杆铲土负荷压力大一些,但相差不大,因此即使动臂优先可调阀的通油截面积比较大,也能控制动臂提升,使动臂提升速度的变化比较慢。
按下仪表盘上的整地模式按键,控制器将不给比例电磁阀输出电流,因而比例电磁阀的输出压力为0MPa,受其控制的动臂优先可调阀的通油截面积开得最大。左边液压泵排出的油供到动臂2和斗杆1,但因为动臂负荷压力比斗杆负荷压力高,所以油几乎都流向斗杆而不流向动臂。
右边液压泵排出的油供给动臂1和斗杆2。油经过动臂优先可调阀时被节流,之后油流到斗杆2。因为节流时有压力损失,所以向负荷压力较高的动臂1供油成为可能。在这个作业模式下,斗杆动作(1.5速),动臂动作(0.5速),因此可达到快速整地作业的效果。
5.提升模式[pBP设定值为2.9MPa(600mA)]
在仪表盘上按下提升模式按键,则控制器向比例电磁阀输出最大电流,使比例电磁阀输出最大压力,其控制的动臂优先可调阀将因切断通油开口而断路。同时,溢流阀的设定压力提高,系统压力增高,这样就提高了起重能力。
左边液压泵排出的油流向负荷压力低的斗杆,而不会流向负荷压力高的动臂。由于动臂优先可调阀切断了去斗杆2的油路,因此右边液压泵排出的油全部流向动臂。
6.回转速度可调功能
此功能适用于全部作业模式,pBP设定值可用回转调节旋钮设定。
顺时针方向旋动回转调节旋钮,控制器向比例电磁阀输出的电流增大,比例电磁阀输出的压力也增大,从而使回转优先可调阀的通油截面积变小,这样,左边液压泵排出的油通过回转优先可调阀时受阻,压力损失增大。左边液压泵的负荷压力为提升动臂的负荷压力,供到回转马达的压力越高,回转动力越大。相反,左边液压泵供给动臂2滑阀的油量随着回转优先可调阀通油截面积的减小而减小,动臂提升速度变慢。右边液压泵供出的油将全部通过动臂1滑阀到动臂液压缸。
若把回转调节旋钮向逆时针方向旋到底,则回转压力与动臂提升负荷压力相等,动臂液压缸的动作速度变为最快,而回转速度变为最慢。若把回转调节旋钮向顺时针方向旋到底,则左边液压泵排出的油全部供到回转马达,液压泵的负荷压力一直上升到与回转马达的溢流压力相等,回转速度最大,而动臂提升只靠右边液压泵供油进行,故其速度最慢。
用回转调节旋钮可以进行回转速度和动臂提升速度的分配。在装车作业时,根据自卸卡车的位置、装车高度等,对速度进行最佳分配。
除此之外,还可以进行其他复合动作,如动臂提升+斗杆往里收+铲斗铲挖复合动作,回转+斗杆卸土(往外伸出)复合动作,回转+左(右)行走复合动作,铲斗+左(右)行走复合动作等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





