1.大臂上升操作
当右操纵杆向后推时,遥控阀输出控制信号XAb、XAb2,主控制阀的大臂阀芯通过遥控阀的先导油压被移至上升的位置。前泵来的油流进主控制阀中的大臂2阀、后泵来的油流进主控制阀中的大臂1阀,然后合流经大臂保持回阀(图2-12中位于大臂1阀上方)流进大臂液压缸的大室,如图2-12所示。同时,大臂液压缸小室的油通过主控制阀的大臂阀芯返回到液压油箱。操作完成,则大臂上升。此时操纵杆返回中间位置,保持大臂液压缸底端压力的油路被大臂保持回阀关闭。这样就阻止了大臂液压缸的漂移。
2.大臂下降操作
当右操纵杆向前推时,遥控阀输出控制信号XBb,主控制阀里的大臂阀芯通过遥控阀的先导油压被移至下降的位置。后泵来的油流进主控制阀中的大臂1阀,然后流进大臂液压缸的小室。同时,大臂液压缸大室的油经大臂保持回阀、通过主控制阀中的大臂1阀阀芯返回到液压油箱。当大臂下降速度加快时,从大臂液压缸大室返回的油与后泵返回的油合并,然后流进液压缸小室。这样当后泵的流量不能与大臂下降速度相匹配时,可以阻止液压缸因为负压力而产生气穴现象,而且通过溢流阀,可以阻止大臂液压缸杆末端油路压力过大,如图2-13所示。
3.回转操作
当左操纵杆推向左或推向右时,遥控阀的先导油压推动主控制阀里的回转阀芯向左或向右。
前泵的油流进主控制阀,然后再流进回转马达。同时,回转马达的回油通过主控制阀里的回转阀芯返回到液压油箱。当操作完成时,机器上部可向左或向右进行回转。回转马达中装配有回转停车制动器、补充阀和过载溢流阀。补充阀可以防止回转马达中气穴现象的发生,如图2-14所示。
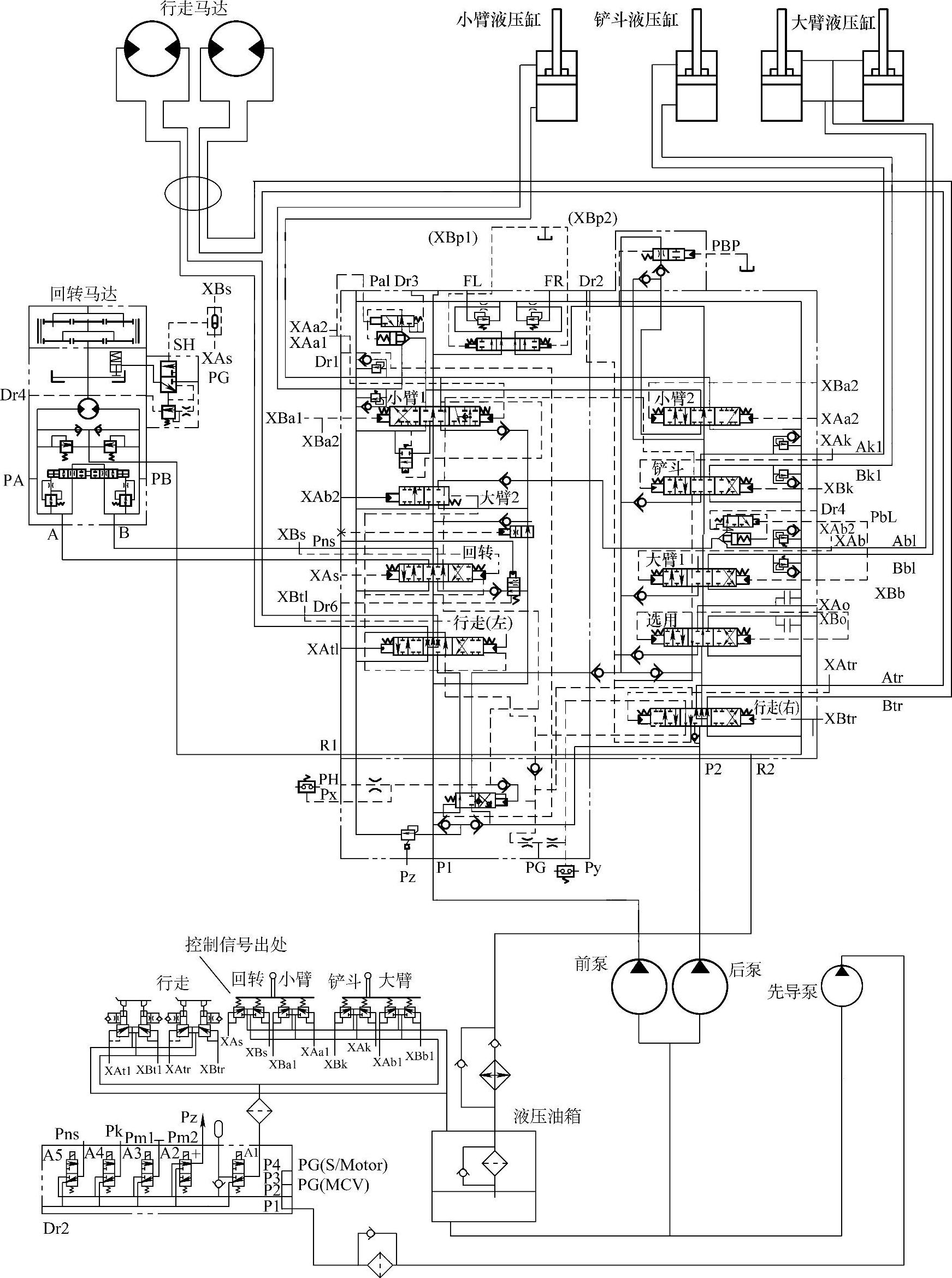
图2-11 回转制动器解除先导油路
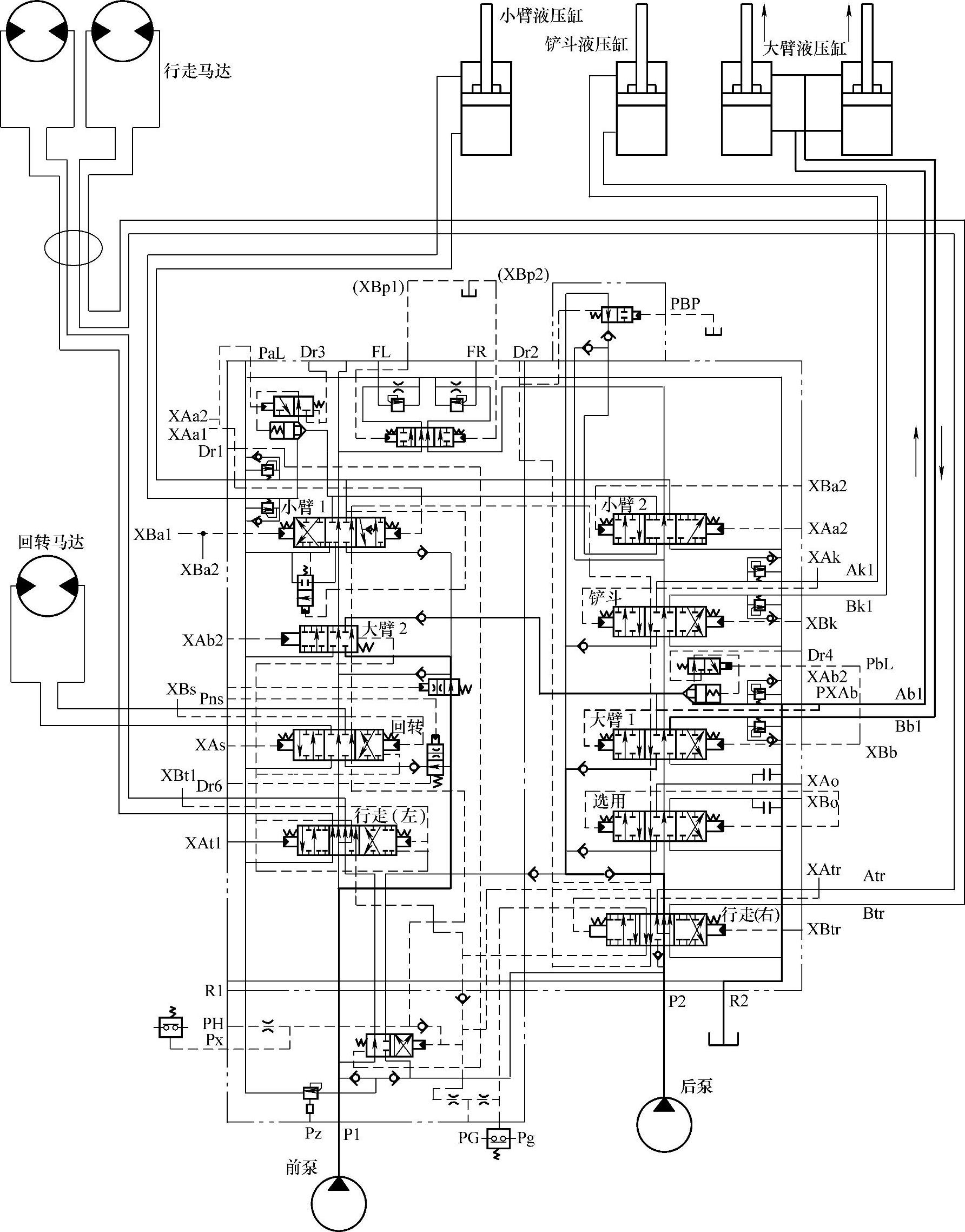
图2-12 大臂上升油路
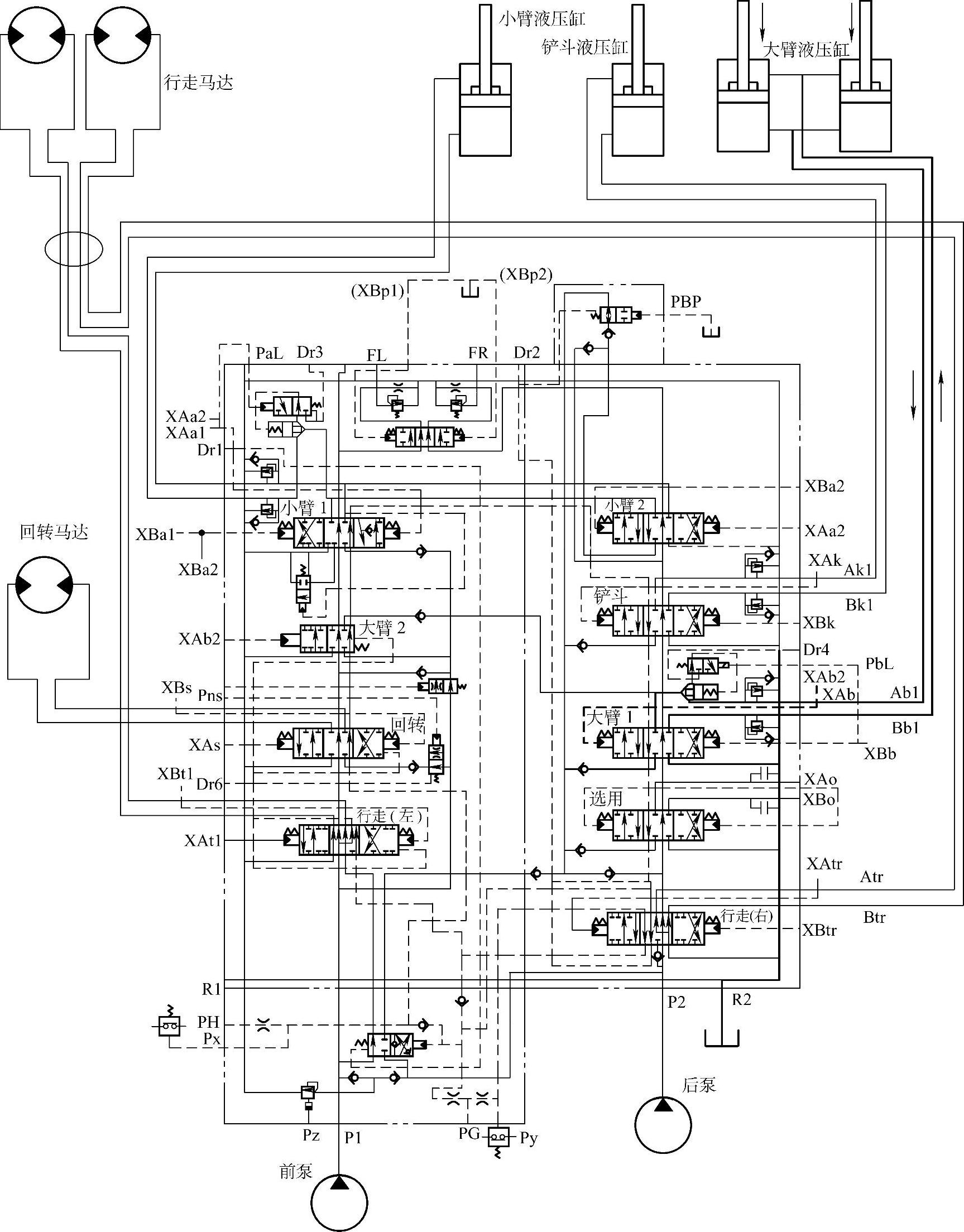
图2-13 大臂下降油路
马达制动阀:回转马达的马达制动阀限制缓冲器起动和停止回转压力。
补充阀:补充阀通过提供回油到马达的真空端来防止气穴现象。
停车制动:如果机器需要在行驶中停车,那么由于机器自身的重量可能导致惯性滑动,连接制动器就可以防止机器惯性滑动。停车制动“OFF”操作时,先导泵的先导压力油可解除停车制动器命令,当左操纵杆安装在回转位置时,梭阀的先导压力被转移到制动卸压阀,使制动卸压阀被转换。然后,先导压力提起制动柱塞,使停车制动器卸压。停车制动“ON”操作时,当操纵杆位于中间位置时,先导油通道压力下降,然后,制动卸压阀返回到中间位置,从制动柱塞来的油返回到油箱,制动器设定在“ON”的位置。
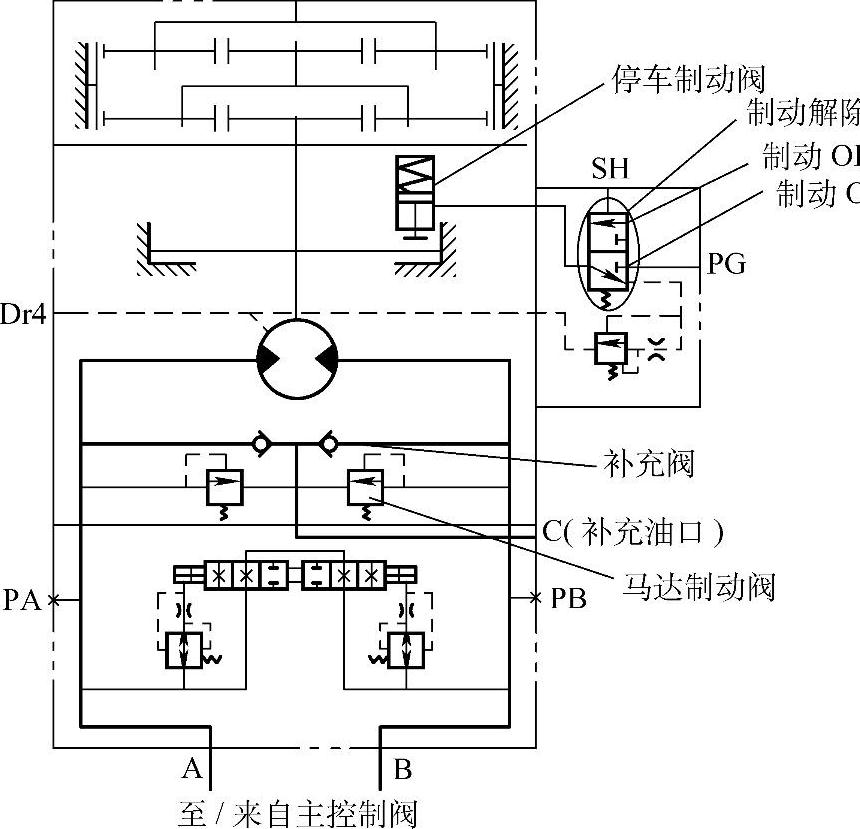
图2-14 回转平衡和制动油路
旁通阀:旁通阀吸收因回转动作而产生的振动,并减少因回转所带来的机器摆动。
4.向前行走和倒退行走
当行走杆向前推或向后推时,主操纵阀的行走阀芯被遥控阀来的先导油压移动向前或向后。
两个泵的油流进主操纵阀,然后通过中央回转接头流进两个行走马达。(www.daowen.com)
行走马达的回油通过回转接头和主控制阀的行走阀芯返回到液压油箱。
动作完成后,机器向前或向后移动。
如图2-15所示,装在行走马达上的阀提供下列功能。
平衡阀:当机器在斜坡上停止时,平衡阀防止机器马达过度运转。
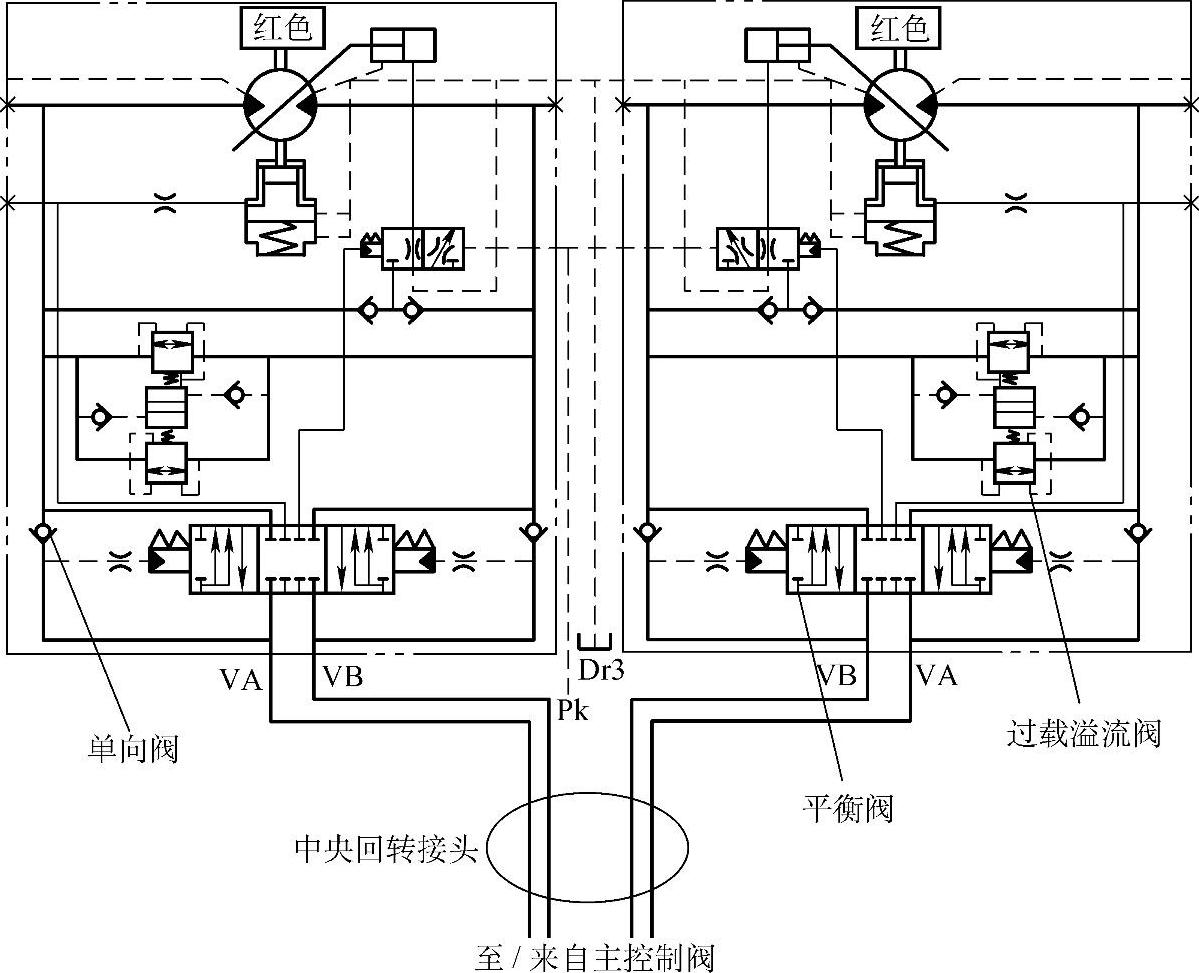
图2-15 行走平衡油路
过载溢流阀:过载溢流阀限制油路压力在365kgf/cm2,以防止机器停止时产生高压。马达停止,过载溢流阀吸收来自低压管道里的油来防止负压和马达产生气穴现象。
5.回转、大臂、斗杆和铲斗复合操作油路
当回转、大臂、斗杆和铲斗复合操作时,主控制阀里的每个阀芯同时被遥控阀的先导油压移动到复合功能的位置,如图2-16所示。
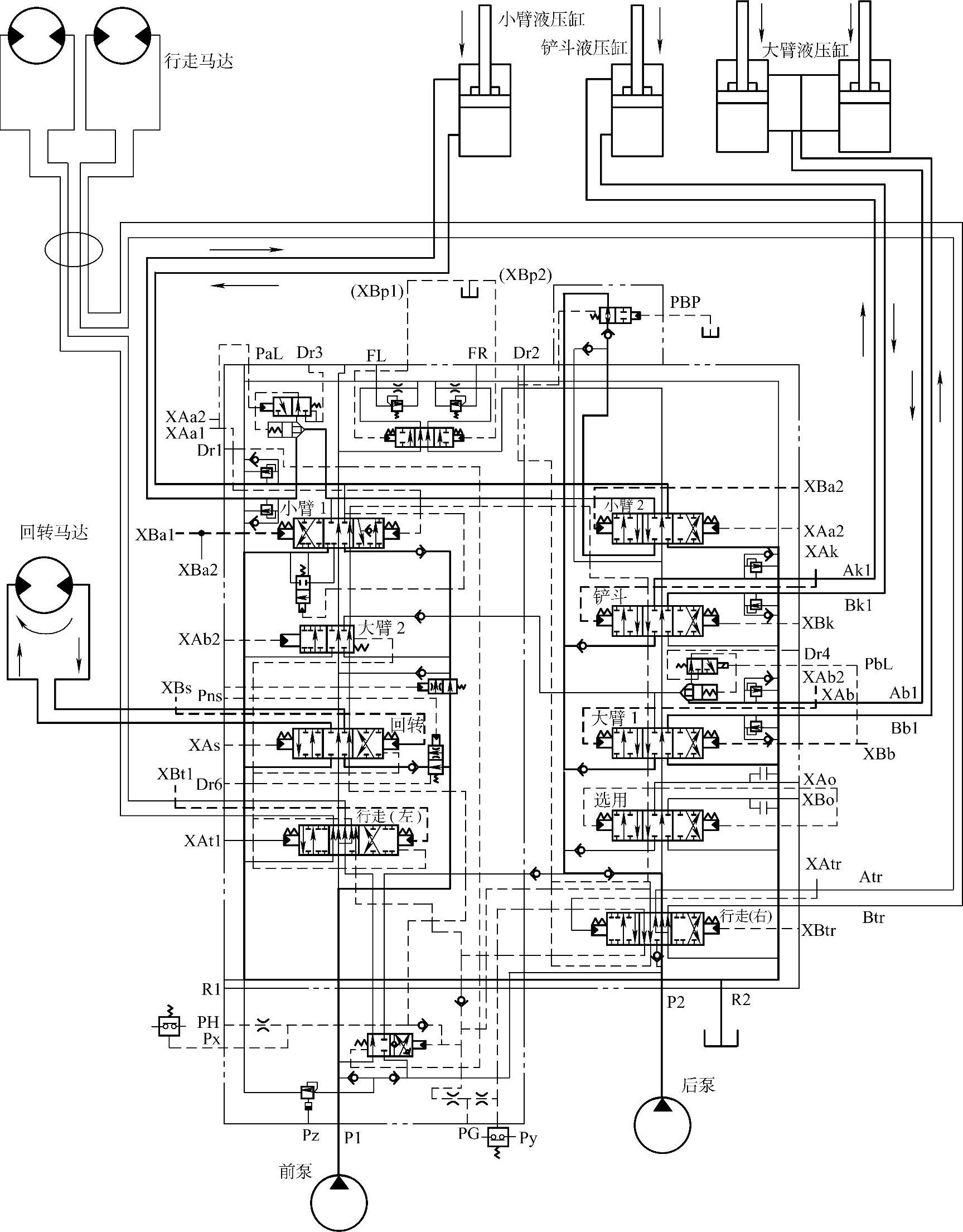
图2-16 回转、大臂、斗杆和铲斗复合操作油路
前泵的油通过左控制阀里的回转阀芯、大臂2阀芯、斗杆1阀芯、并联通道和汇合通道流进回转马达、大臂液压缸、斗杆液压缸。
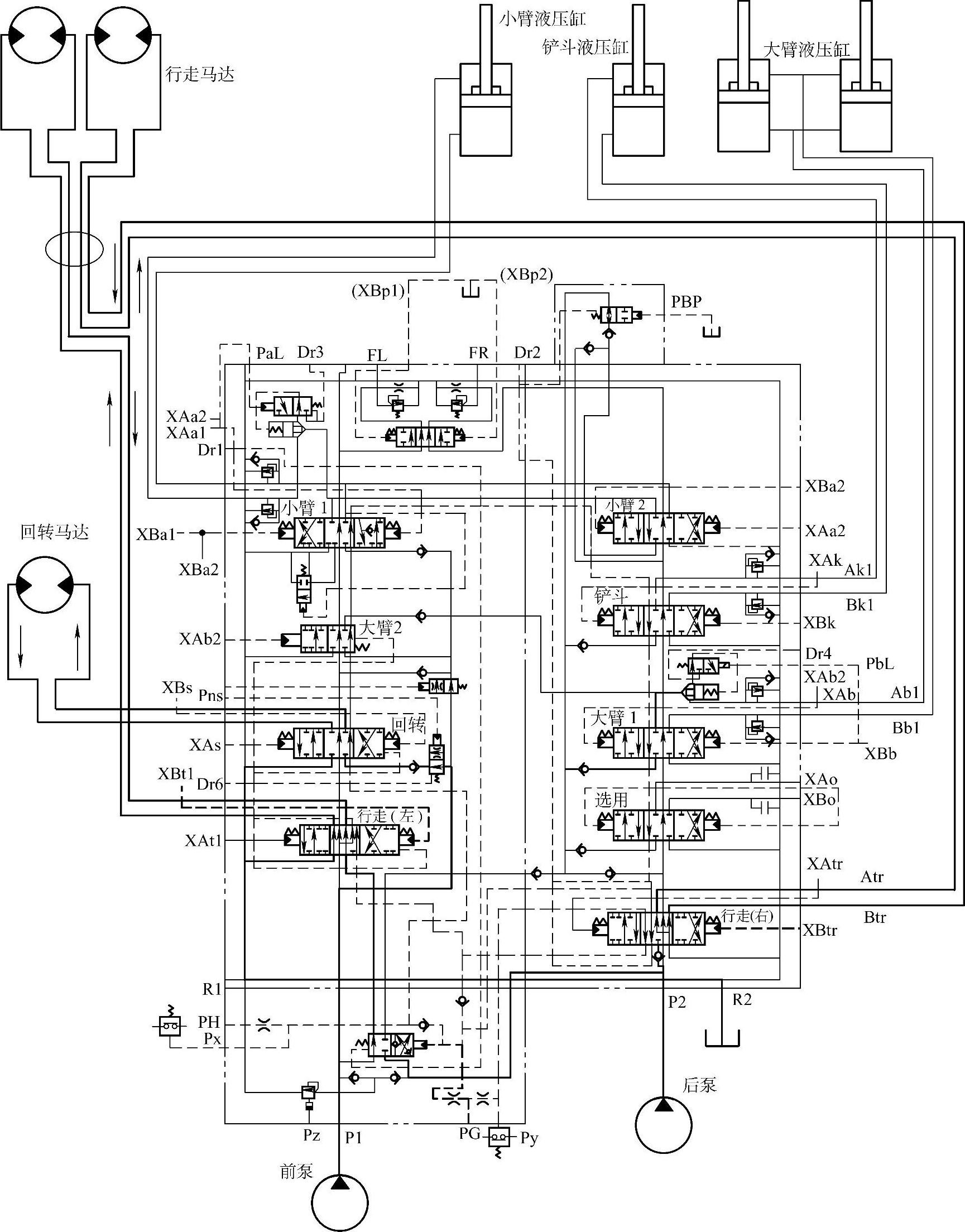
图2-17 回转和行走复合操作油路
后泵的油通过右控制阀里的大臂1阀芯、斗杆2阀芯、铲斗阀芯流进大臂液压缸、斗杆液压缸和铲斗液压缸、并联通道和汇合通道。
机器上部进行回转,大臂、斗杆和铲斗进行操作。
6.回转和行走复合操作油路
当回转和行走复合操作时,主控制阀里的回转阀芯和行走阀芯同时被遥控阀的先导油压移动到复合功能的位置。直线行走阀芯被先导泵的先导油压推向左边,如图2-17所示。
前泵的油通过回转阀芯流进回转马达。后泵的油经直线行走阀芯,通过右行走阀芯和左行走阀芯流进行走马达。
机器上部进行回转,并直线行走。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





