1)液压行走驱动系统液压元件的选择:液压驱动的振动压路机的行走系统一般分为两挡无级调速:第一挡为低速挡,也是振动压实作业的工作挡。它的行走速度较低,一般在0~6km/h范围内无级变化;第二挡为高速挡,其速度视不同机型而变化,一般在0~12km/h范围内无级变化。实现变速的方法有两种:一是定量液压马达驱动具有两挡的变速器来实现两挡变速;另一种是选用具有两挡工作转速的定量液压马达,以实现两挡变速。绝大多数振动压路机的液压行走驱动系统的无级变速是通过采用变量泵带动定量液压马达来实现的。而实现无级变速控制的方法大致有三种:杠杆控制、凸轮控制和电子控制。
杠杆控制无级变速机构是通过一套杆系直接操纵变量液压泵的斜盘,通过改变变量泵斜盘倾角而改变液压泵的排量。由于变量泵斜盘倾角与变量泵的排量成正比,因而可实现操纵杆不同位置对应不同行驶速度的正比关系。但由于变量泵在零位区是变量的死区,在零位区附近工作的行走系统液压冲击较大,特别是在振动压路机换向工作时,其换向加速度较大,如图3-22所示。
为了克服杠杆控制所带来的液压冲击现象,人们采用凸轮控制方法以克服变量泵工作的死区造成的液压冲击现象。通过合理设计凸轮工作曲线,可以较好地改善液压冲击现象,如图3-23所示。
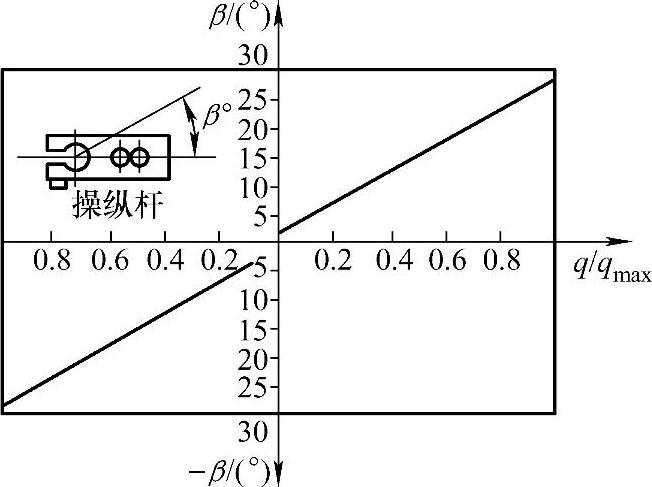
图3-22 操纵杆对应的变量泵特性
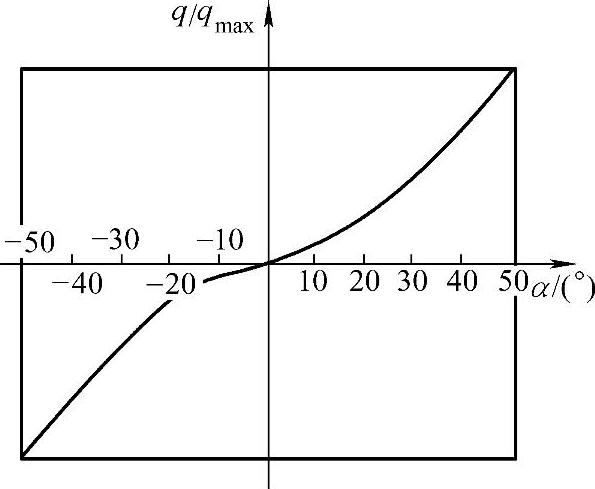
图3-23 凸轮控制对应的变量泵特性
随着电子技术的发展,最近人们又开发了电子恒速控制技术,其基本原理如图3-24所示。这种电子恒速控制技术可保证振动压路机的行驶速度恒定,它既不受路面条件的影响,也不受柴油机转速变化的影响。
2)液压行走驱动系统的液压元件匹配:液压行走驱动系统的液压元件匹配主要是指液压马达与驱动液压泵的匹配,液压泵与柴油机外特性的匹配。
液压行走系统的液压马达必须满足行驶速度和克服地面滚动阻力的要求。行走驱动液压马达的额定转速nN应满足下式:
nN≥nmax
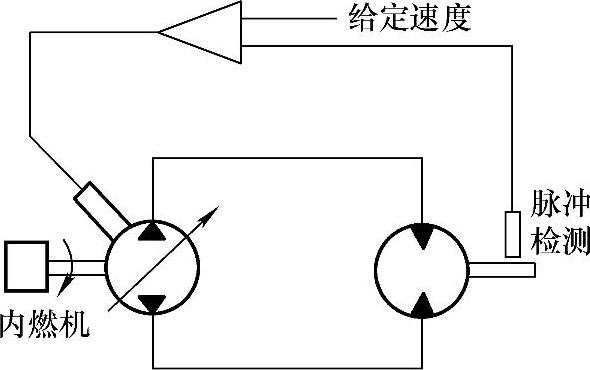
图3-24 电子恒速控制原理
式中 nmax——振动压路机在最高行驶速度下液压马达的转速;
nN——液压马达的额定转速。
为了使振动压路机在工作时的行走速度处于稳定状况,液压马达的最低稳定转速应满足下式
ns≥nmin
式中ns——液压马达最低稳定转速;
nmin——振动压路机最低行驶速度对液压马达的转速。
液压马达的额定流量qmN应满足下式:
qmN≥qV/ηmV
式中 qmN——液压马达的额定流量(L/min);
qV——振动压路机在最高行驶速度工作时所需的流量(L/min);
ηmV——液压马达的容积效率。
上式中的qV可由下面的公式求得:
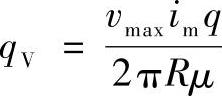
式中vmax——振动压路机的最大行驶速度(m/min);
im——振动压路机轮边减速器速比;
q——液压马达排量(mL/r);
R——振动压路机驱动轮动力半径(m);
μ——振动压路机的滑移系数。
振动压路机的行走驱动液压马达的输出扭矩应保证振动压路机可产生足够的牵引力Fmax。如果振动压路机产生最大牵引力Fmax时,对应的液压马达的扭矩为Mmax,那么液压马达的额定扭矩MN应满足下式:
MN≥Mmax(https://www.daowen.com)
振动压路机所需的最大扭矩Mmax(N·m)可按下式计算:
Mmax=FmaxR/imηm
式中 Fmax——振动压路机所需的最大牵引力(N);
ηm——振动压路机驱动轮轮边减速器效率。
带动振动压路机行走液压马达的液压泵的额定流量应满足振动压路机行驶速度的要求;额定压力应满足振动压路机所需的最大牵引力的要求。
由公式MN≥Mmax可知,当振动压路机发出最大牵引力时,其液压驱动马达的输出扭矩为Mmax,这时对应的行走驱动系统的压力为Pmax,那么,扭矩和压力有如下关系:

因此,上式又可写成:
式中 Pmax——当振动压路机发挥最大牵引力时,液压行走驱动系统压力(MPa);
n——在上述工况下,液压马达的转速(r/min);
q——在上述工况下,液压马达的流量(L/min);
ηmV——液压马达的容积效率;
ηmm——液压马达的机械效率。
当液压马达的最大工作压力为Pmax,在选择液压马达时应保证液压马达的额定压力PMN大于或等于Pmax,即
PMN≥Pmax
当液压马达选定之后,就应根据液压马达的工作压力及流量选择与之匹配的液压泵。液压泵的额定压力PPN应满足:
PPN≥PMN+∆P
式中 ∆P——振动压路机液压行走驱动系统的压力损失。
液压泵的额定流量qPN应满足下式要求:

式中 K——液压行走驱动系统的液压泵数量;
qPN——液压泵的额定流量;
ηPV——液压泵的容积效率;
Z——液压行走驱动系统的液压马达数量。
液压泵在工作时的输入功率为
式中 NP——液压泵的输入功率(kW);
q——液压泵的实际流量(L/min);
P——液压泵的实际工作压力(MPa);
ηPM——液压泵的机械效率。
振动压路机在行驶时,柴油机的油门可能在不断变化,因此转速也在不断变化。根据柴油机的外特性可知,柴油机处在不同的工作转速时,所输出的功率也不相同。如果外界需要的功率大,而柴油机输出功率较小,柴油机就不能正常工作,甚至熄火。所以,所谓液压泵与柴油机外特性的匹配是指柴油机在非怠速状态下工作时,所输出的功率应大于或等于振动压路机液压行走驱动系统和振动系统所需要功率的总和。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





