1.制动电液控制系统建模
制动时可以把蓄能器看做动力源,因为制动时液压泵不直接提供动力,液压泵与蓄能器后面的回路的关系不是很大。因此在研究此系统时,只考虑由蓄能器、制动阀、制动缸等组成的制动模块。简化后的系统相当于一个由蓄能器提供压力源的阀控缸模型,其原理如图8-66所示。
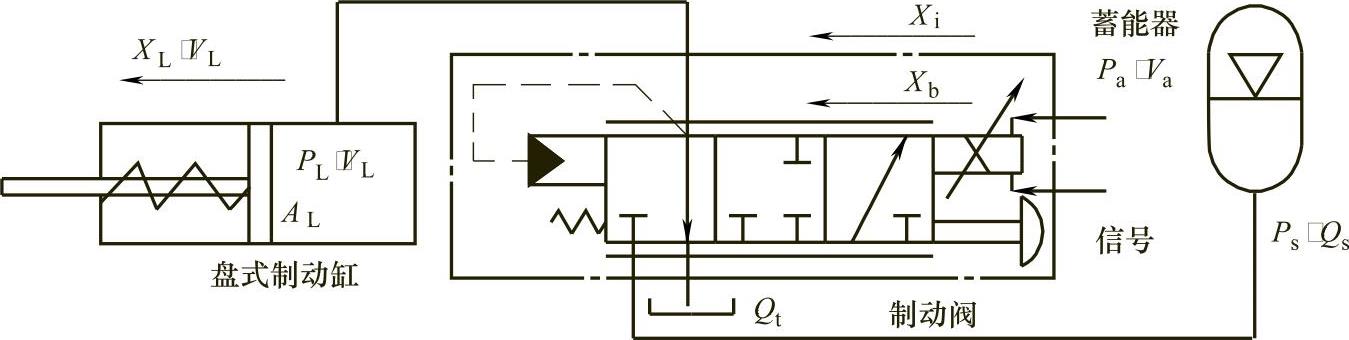
图8-66 电液制动控制系统简化回路图
2.制动电液控制系统特性
抱罐车制动性主要由两个方面来评价:制动距离和制动减速度。假设在地面附着情况不变的条件下,对制动距离做一定量分析,可得制动过程中减速度、行驶速度和行驶距离的时间关系见图8-67。
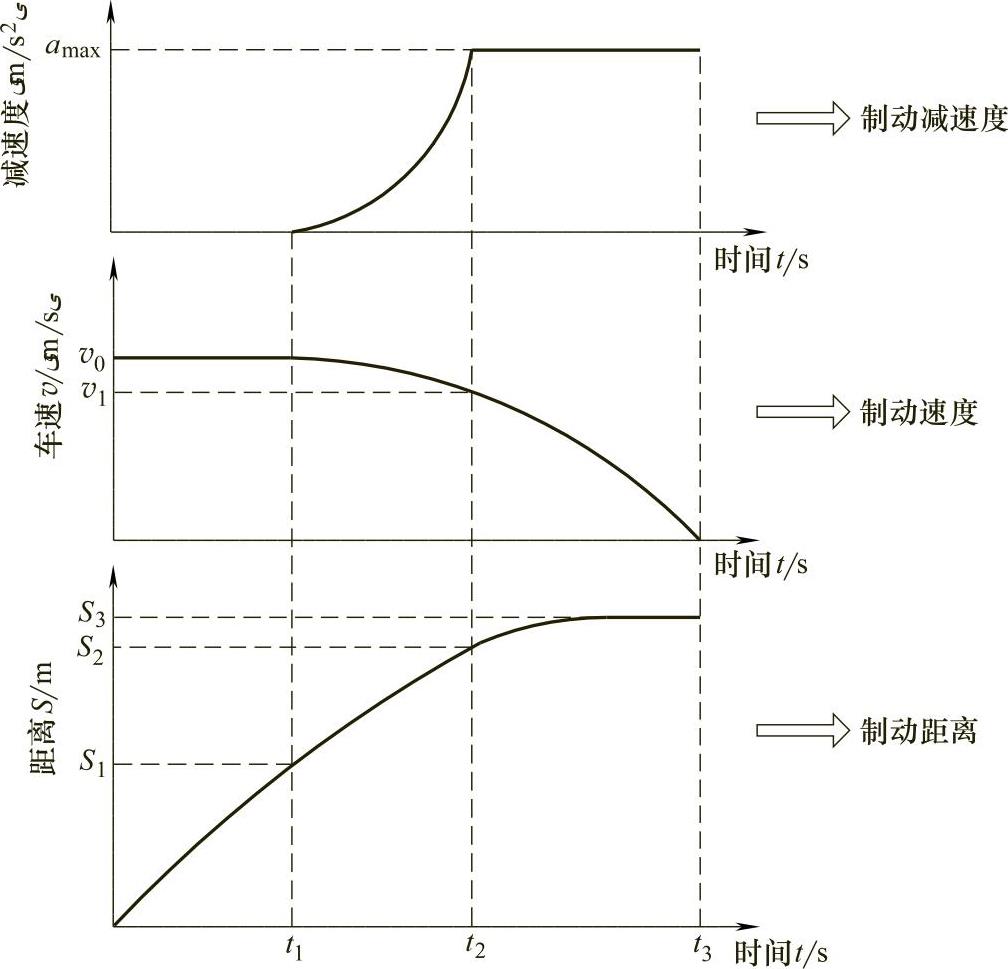
图8-67 制动时间曲线(www.daowen.com)
图8-67为经过简化后的制动减速度曲线。对减速度求其时间积分,即可得到速度时间历程,再积分即可得到制动过程所走的路程。0~t1为驾驶员反应时间和设备反应时间。驾驶员反应时间为驾驶员意识到应进行制动,并开始踩踏的时间,一般为0.4~1.5s。设备反应时间,是加速踏板变换至制动踏板(0.15~0.3s),以消除制动装置中的间隙和弹性所需的结合时间(0.015~0.05s)。此时间内,抱罐车运动的位移为S1,速度一直保持在v0,制动减速度为0。t1~t2时间,制动减速度增加、行驶速度减小的阶段。此时间内,抱罐车运动的位移为(S2-S1),速度由v0变到v1,制动减速度由0~amax。t2~t3时间,制动减速度保持不变、行驶速度减小的阶段。此时间内,抱罐车运动的位移为(S3-S2),速度由v1变到0,制动减速度为amax。从以上分析知道,制动距离仅是停车距离的一部分。
制动系统中蓄能器、制动器等选定以后,根据应急制动次数、制动响应时间、钳盘制动排量和制动缸数量、蓄能器的充气压力、最低工作压力和最高工作压力等参数,可以计算出行车制动和驻车制动,系统压力、蓄能器流量等与制动次数的关系曲线见图8-68和图8-69。图8-68中,前后桥制动的初始压力都是179MPa,根据绝热情况和等温情况,分别进行计算,左右图中的四条曲线从上到下分别是:前桥等温压力和蓄能器排量、后桥等温压力和蓄能器排量、前桥绝热压力和蓄能器排量和后桥绝热压力和蓄能器排量。
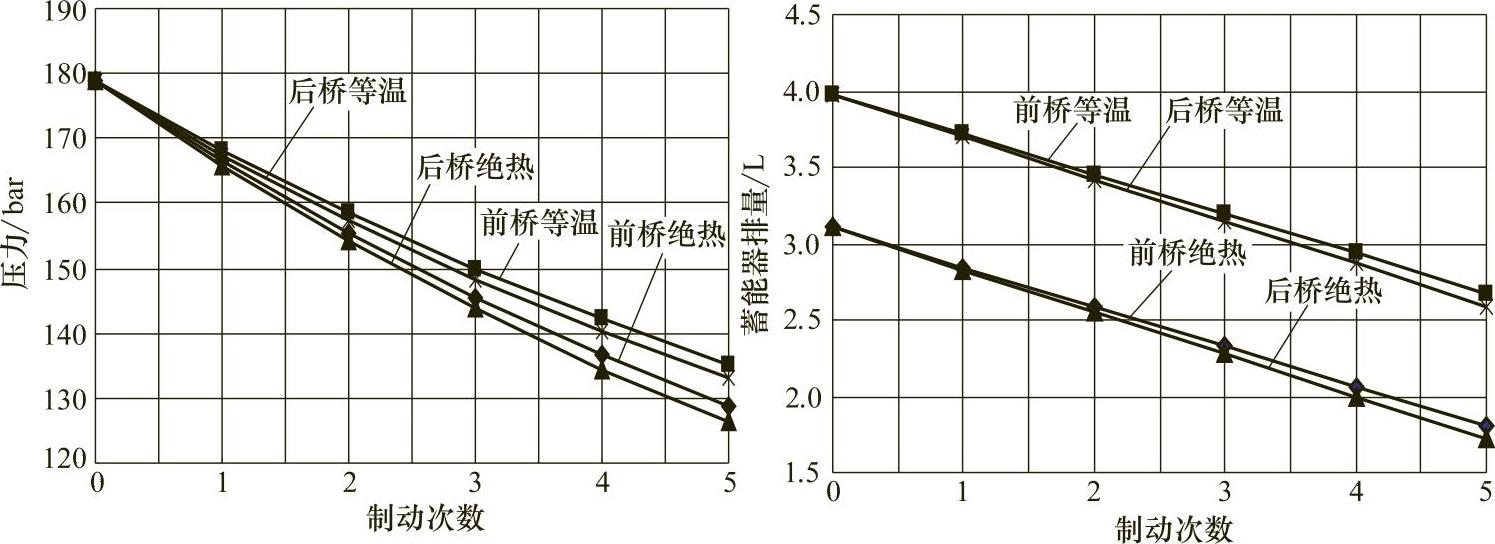
图8-68 行车制动变化曲线
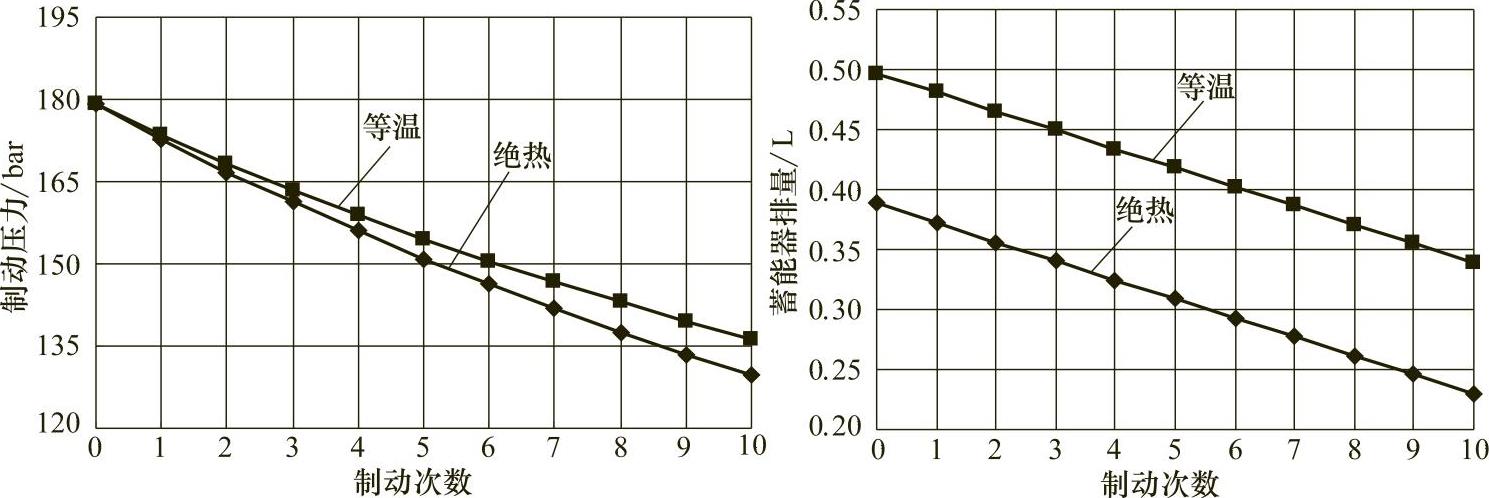
图8-69 应急制动变化曲线
图8-69中,左右图中的两条曲线为:前桥等温压力和蓄能器排量、前桥绝热压力和蓄能器排量。由曲线可以知道,不论是等温状态还是绝热状态,在液压泵出现故障失效,不能给系统提供油液时,蓄能器作为应急能源,均可以实现5次紧急行车制动完成、5次紧急驻车制动解除;前后桥制动压力损失、制动排量均相近,说明前后桥中的制动器、蓄能器等元件的选取和匹配是正确的,抱罐车具有良好的制动性能。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






