1.高空作业车动力单元
该车采用全液压驱动和电液比例控制系统,需要驱动和控制的执行元件包括扩桥液压缸、顶升液压缸、转向液压缸、行走马达、伸缩液压缸、调平液压缸、变幅液压缸、回转马达等,系统原理如图8-33所示。
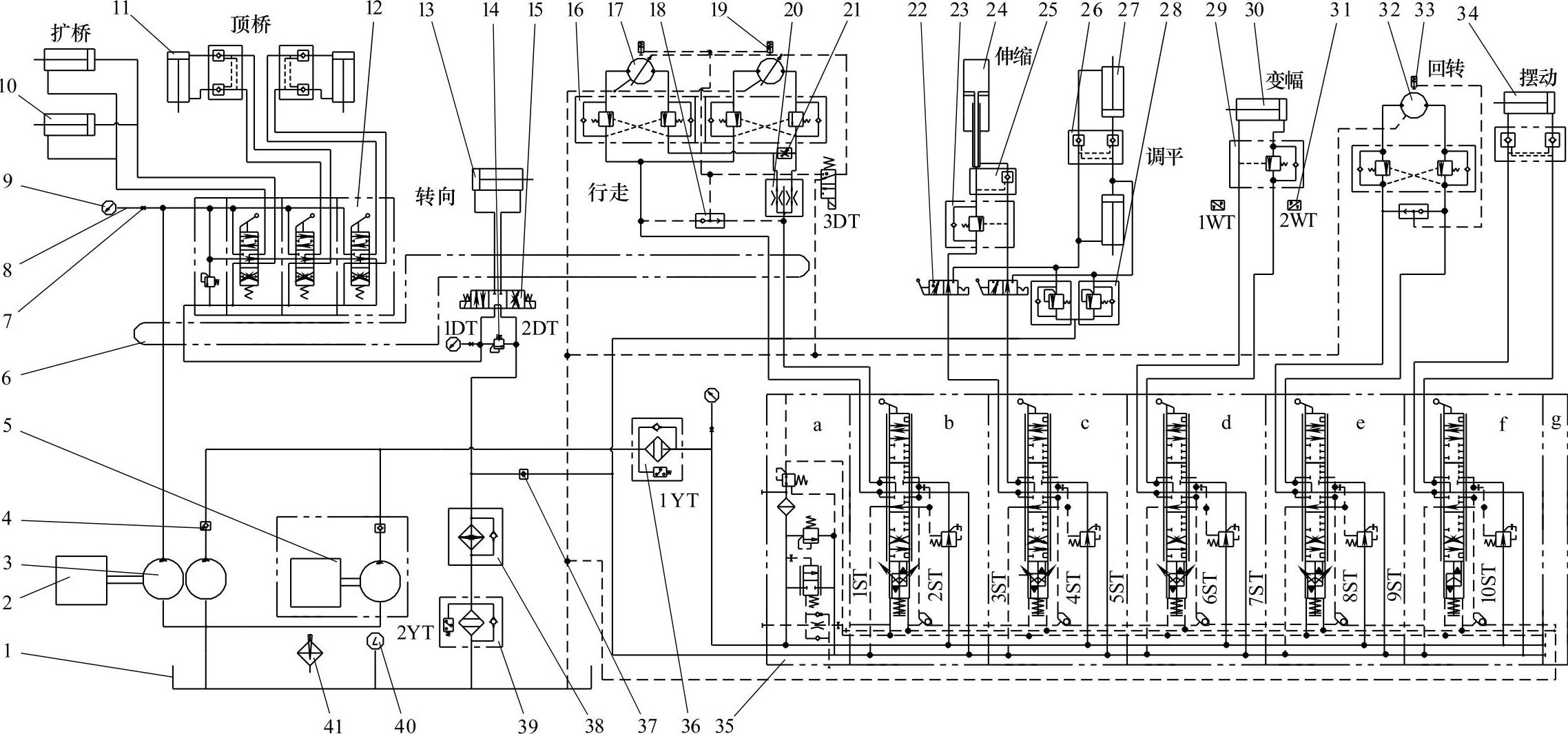
图8-33 TLK21的液压系统图
1—油箱 2—发动机 3—齿轮泵 4、37—单向阀 5—应急动力单元 6—旋转接头 7—测压接头 8—测压软线 9—压力表 1O—扩桥液压缸 11—顶升液压缸 12、22—手动换向阀 13—转向液压缸 14—溢流阀 15—电磁换向阀 16—双平衡阀 17—液压马达 18—梭阀 19—减速器 2O—分流集流阀 21—节流阀 23、28—平衡阀 24—伸缩液压缸 25—液控单向阀 26—双液控单向阀 27—调平液压缸 29—平衡阀机 3O—变幅液压缸 31—压力传感器 32—回转马达 33—回转减速器 34—摆动液压缸 35—比例多路阀 36—压力滤油器 38—冷却器 39—回油滤油器 4O—液位液温计 41—空气滤清器
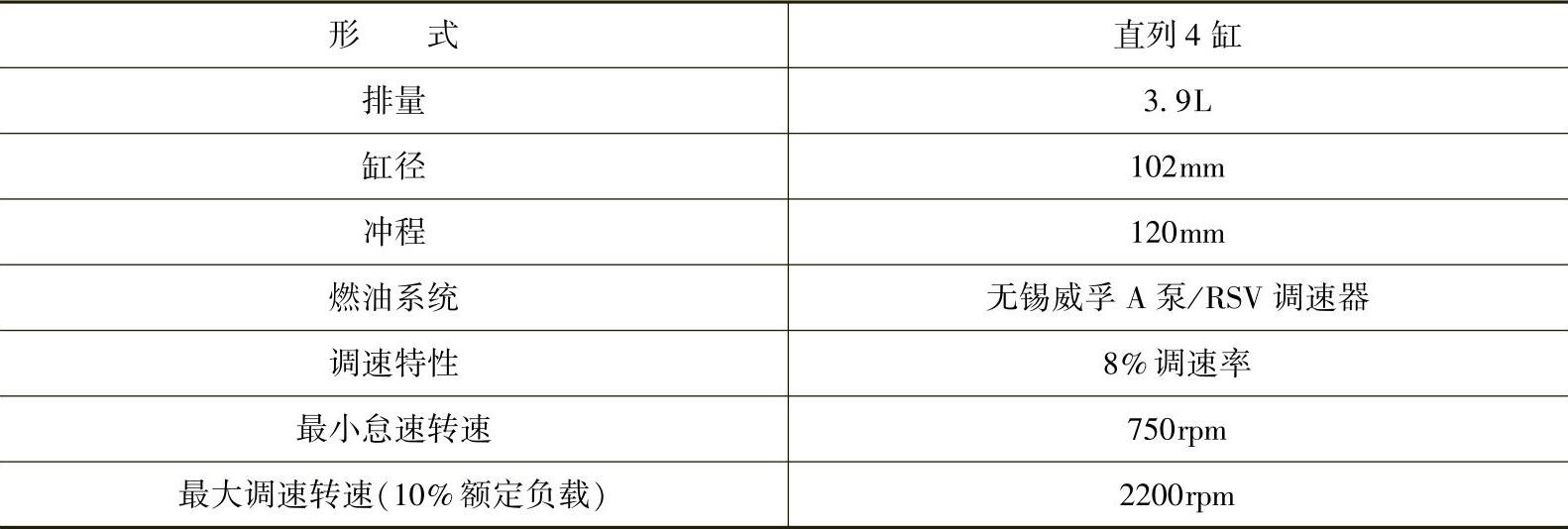
高空作业车液压系统所有动力来自于一台康明斯水冷柴油发动机(4BT3.9-C80),其主要性能参数见表8-5。它通过弹性联轴器(扭力减振器)驱动双联齿轮泵为液压系统提供动力。双联泵3采用排量分别为50mL/r和32mL/r、额定压力为25MPa的齿轮泵。其中排量较小的泵为顶升、扩桥和转向系统供油,同时在这一回路上设置有冷却器38和回油滤油器39,从而保证液压系统的正常工作。另外,为防止作业时因发动机故障等原因不能产生高压液压油,使作业平台不能动作,高空作业车上设置了与直流电动机直连的应急动力单元5,保证作业人员安全降到地面。
发动机油门采用IMD-3油门驱动器控制,该电子油门驱动器以其独特的开关驱动—比例调节行程、简单便捷的特点广泛取代了原柴油发动机的手动机械连杆驱动方式。DC电动机线性驱动器安装简单、拉力大、简捷高效、成本低廉,常用于工程机械的大型柴油机的油门电子调速控制。柔性软轴连接方式(标准),可与多数厂家的汽油/柴油发动机组油门驱动元件匹配。
表8-5 发动机性能参数
2.主要装置的液压驱动系统(www.daowen.com)
(1)顶升和扩桥装置液压驱动回路 顶升和扩桥液压驱动回路原理见图8-33的扩桥和顶升部分,采用三联手动换向阀12控制扩桥液压缸10和顶升液压缸11,包括一个前车桥顶升手动阀、一个后车桥顶升手动阀和一个车桥扩张(收存)手动阀。其中两个扩桥液压缸采用并联的连接形式,在前后顶升液压缸的进出油口装有双液控单向阀,防止顶升液压缸由于控制回路故障等原因突然下降引起事故。当前桥需要扩张或收存时,操作前桥顶升手动阀,使得前桥的顶升液压缸工作并使前桥轮组上升离开地面,然后操作扩桥(收存)手动阀,通过前桥扩桥液压缸工作完成前车桥的扩张或收存作业。当后车桥需要扩张或收存时,操作后桥顶升手动阀,使得后桥的顶升液压缸工作并使后桥轮组上升离开地面,然后操作扩桥(收存)手动阀,通过后桥扩桥液压缸工作完成后车桥的扩张或收存作业。
(2)伸缩装置液压驱动回路 伸缩臂变幅液压驱动回路见图8-33的伸缩部分,由伸缩液压缸24、平衡阀23、液控单向阀25以及比例多路阀35等构成,手动换向阀22用于向调平系统供油。伸缩液压缸采用特殊的结构,其结构如图8-34所示。
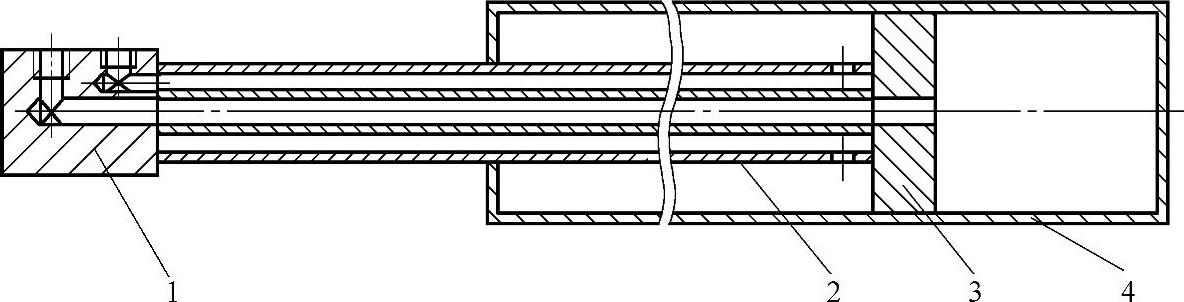
图8-34 伸缩液压缸结构示意图
1—端部集成块 2—活塞杆 3—活塞 4—缸体
其中,活塞杆端部集成块1铰接于基本臂的后部,液压缸缸体有杆腔侧的端部铰接于二节臂的后部。为了方便对液压缸供油,将活塞杆设计成双层套管的形式,其中内层管路通过活塞与伸缩液压缸的无杆腔相通,形成无杆腔油路;活塞杆外层与内层管路的间隙形成与液压缸的有杆腔相通的油路。这两个油路分别通过活塞杆端部的集成块与系统供油、回油油路连接,另外在有杆腔油路中安装有平衡阀23,在无杆腔回路中安装有液控单向阀25,这两个阀都安装在活塞杆端部集成块上,构成液压锁,防止由于配管或输油软管等破裂引起伸缩臂坠落。当伸缩臂缩回,即系统向伸缩液压缸无杆腔供油时,平衡阀23可以调定其控制油路的开启压力,为伸缩液压缸无杆腔提供一定的背压,使伸缩臂平稳缩回,防止产生爬行现象或者在伸缩臂变幅角度0°以下时伸缩臂的自然伸出现象。
(3)变幅液压驱动回路 变幅液压驱动回路见图8-33的变幅部分,由比例多路阀35、变幅液压缸30、平衡阀机29等元件组成。平衡阀安装在变幅缸里,用来防止伸缩臂因配管或输油软管等破裂而失速下降。通过比例控制可以实现伸缩臂幅度的改变。另外,在液压缸两个腔的回路中分别安装有压力传感器31,构成全自动力矩限制系统的一部分,用于测定两个腔的压力,将压力电信号送入控制器,通过程序计算系统的即时力矩,保障整车工作的安全性。
(4)回转液压驱动回路 回转液压驱动回路见图8-33的回转部分,由比例多路阀35、回转马达32、梭阀以及双平衡阀等元件组成。其中梭阀用于向回转减速器33提供解除制动信号,因为回转减速器内置有停车制动装置,使回转减速器在没有动作信号时保持制动状态。双平衡阀使液压马达在没有动作信号时处于自锁状态,在通过比例换向阀向液压马达供油后,可以使液压马达平稳运转,防止液压马达产生“飞速”现象。
(5)其他装置液压回路 对于作业斗摆动装置驱动回路,由比例多路阀35和摆动液压缸34构成一个简单的阀控缸回路,另外双液控单向阀构成液压锁;对于转向液压驱动回路,也是一个简单的阀控缸系统,在此不再赘述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





