
1.高空作业车转向装置
如图8-29所示,转向装置是根据汽车转向原理设计的,采用纵向摇杆式转向梯形机构,使得车辆在转弯的过程中保持内外轮胎处于纯滚动状态,避免了轮胎的磨损和车辆在转向离心力作用下产生“侧滑”现象。转向系统通过转向液压缸和转向拉杆来实现前车桥车轮向左向右转向。特别注意的是由于扩桥的需要,转向拉杆设计成用销钉连接的两节可以伸缩的机构,因此,当进行扩桥操作时首先应取下连接销钉,然后进行扩桥操作,扩桥完成后再将销钉放回,缩桥的操作也是如此。
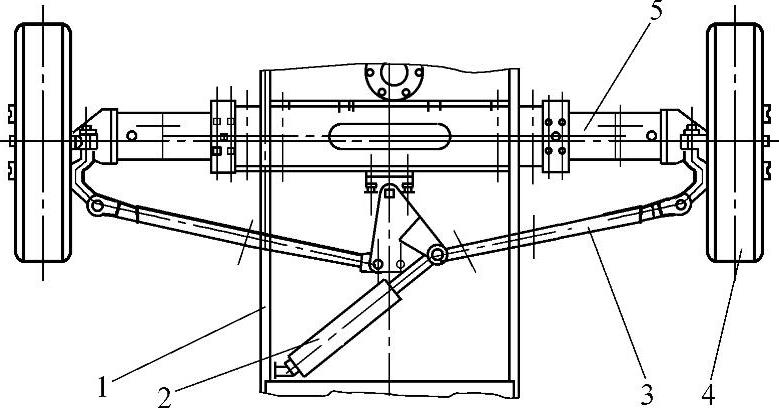
图8-29 转向装置原理图
1—底盘 2—转向液压缸 3—转向拉杆 4—轮胎 5—前桥
2.高空作业车伸缩臂装置
伸缩臂是由钢板焊制的箱型结构,共三节(基本臂、二节臂、三节臂),全动力同步伸缩,全部伸出时臂长21m,全部缩回时8.7m。伸缩机构原理如图8-30所示。二节臂采用一个双作用液压缸实现伸缩。液压缸倒置安装,活塞杆端头用销轴固定在基本臂根部,液压缸中部铰点将缸体连接在二节臂后端。因此,当活塞杆端头通入压力油后,二节臂随同液压缸体一同伸出或缩回。
三节臂采用钢丝绳系统进行伸缩。两条伸臂钢丝绳一端固定在基本臂的前端,然后穿过安装在二节臂前端的滑轮固定在三节臂的后端。两条缩臂钢丝绳一端固定在基本臂前端,然后穿过固定在基本臂前端及二节臂尾部的导向滑轮,再固定在三节臂的后端。这样,当二节臂在液压缸作用下向外推出时,通过伸臂钢丝绳同时将三节臂拉出;同样,二节臂缩回时,通过缩臂钢丝绳将三节臂拉回。
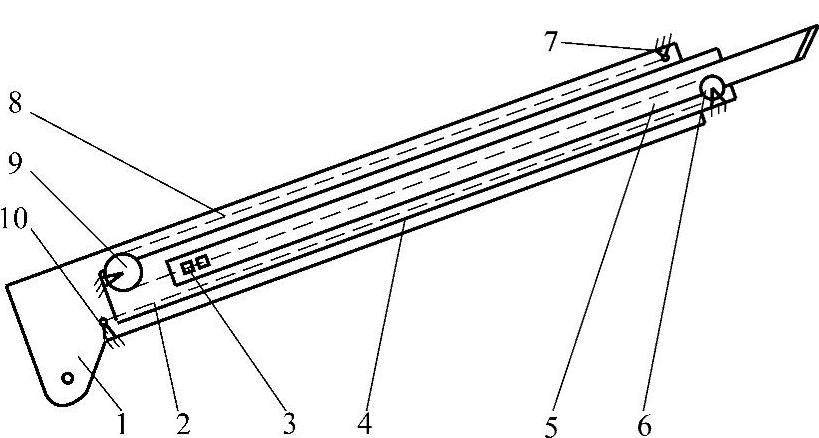
图8-30 伸缩臂原理图
1—基本臂 2—伸臂钢丝绳 3—三节臂钢丝绳固定点 4—二节臂 5—三节臂 6、9—二节臂上滑轮 7、10—基本臂钢丝绳固定点 8—缩臂钢丝绳
3.高空作业车顶升和扩桥装置
根据需要前车桥和后车桥设计成可伸缩形式,不仅满足了公路运输的要求,也满足了客户在窄小工作环境下正常工作的需要。车桥扩张装置由底盘、车桥、扩桥液压缸和顶升液压缸组成,其原理如图8-31所示。车桥分成两个半桥安装在底盘4上,在轴向可以伸缩,扩桥液压缸2的缸体铰接在其中一个半桥上,而活塞杆铰接在另一个半桥上,这样当扩桥液压缸伸出或缩回时,两个半桥随之动作实现了扩桥或回收动作。顶升液压缸3焊接在车底盘上,其活塞杆伸出可以使车桥离开地面,保证扩桥时两个轮胎离开地面,以减少扩桥阻力。

图8-31 扩桥装置原理图(www.daowen.com)
1—车桥 2—扩桥液压缸 3—顶升液压缸 4—底盘 5—轮胎
4.高空作业车回转装置
高空作业车的回转装置可以实现作业斗水平运动,作业平台的回转部分(转台)和非回转部分(底盘)之间的传力装置称为回转支承装置,驱动部分则称之为回转机构。回转机构由液压马达、回转减速器、回转轴承以及转台等构成,回转机构原理如图8-32a所示。
回转马达所产生的回转力通过回转减速器被减速传递给小齿轮。因小齿轮与回转轴承的大齿圈的外齿啮合,所以在传递给小齿轮的回转力作用下,转台可在回转机构球支承上连续360°回转。这里采用的“单排球式回转支承”回转装置是国际先进的四点接触球式结构,如图8-32b所示。回转驱动装置的大齿圈与滚动轴承式回转支承装置的座圈制成一体,采用外啮合的方式。这种支承是承受轴向力、径向力、倾覆力矩并需相对旋转的机械最理想的配套件。
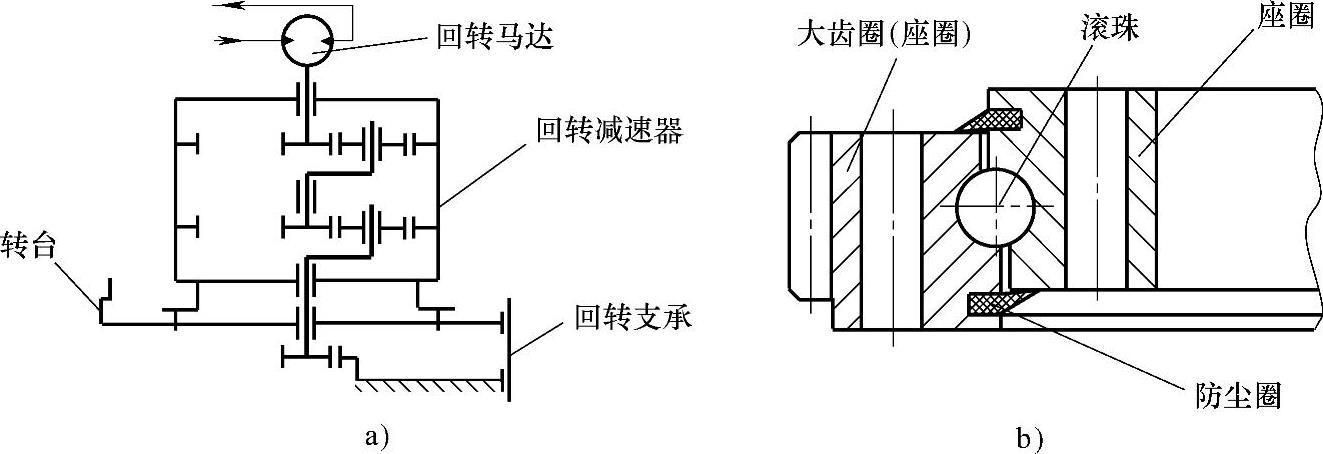
图8-32 回转装置原理图
a)回转机构原理 b)单排球式回转支承
5.高空作业车安全装置
(1)全自动力矩限制 全自动力矩限制由PLC控制器、拉绳传感器、角度传感器、压力传感器、两轴倾角传感器等组成。可以防止高空作业车因过载而损坏,还可以防止翻车等事故的发生。
(2)紧急停止装置 进行作业时,因周围情况处于危险状态而需要紧急停止作业时,只要按设在上部操作装置上的紧急停止开关,发动机就会马上停止工作,使全部动作停止。恢复作业时,经确认周围环境没有危险后,只要按一下紧急停止开关,使发动机起动,则可进行作业。
(3)拉线开关 进行作业时,因周围情况处于危险状态而需要紧急停止作业时,只要用身体一部分碰触拉线开关,就能使全部动作停止,但发动机不停止,释放则解除停止,可重新作业。
(4)脚踏开关 脚踏开关安装在作业台底板上,如果没有踏此脚踏开关则不能进行伸缩臂的伸缩、变幅、回转、行走、作业台横向摆动及转向等的操作。因此,误接触操作手柄也不会发生动作,可防止误动作。为防止工人不规范操作,用物体压踏下脚踏开关,一旦发生误动作则非常危险,特别为脚踏开关设置了7s的延时,超过7s作业者没有对平台进行操作则认为此脚踏开关失效,需要重新踏此开关才能进行操作。
(5)紧急用液压泵 进行作业时因发动机故障等不能产生液压而使作业平台不能动作时,为了让作业人员降到地面,本高空作业车上装置了与直流电动机直连的液压泵。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






