基于分布式层次诊断模型的任务分解策略实际上是诊断求解过程,可以分为任务分解、子任务分配、子任务求解和局部综合4个阶段,如图6-8所示。子任务分配由分解的子层形成不同层次和不同性质的任务,子任务求解根据不同诊断方法完成模型求解或信息的分析处理,子任务求解中包含有自己的子专家系统库,子诊断模型和诊断处理方法。最底层完成数据采集和信号变换及处理、通信等功能。
有效的分解方法取决于各节点的求解能力和子任务的满意程度,并直接影响到诊断的效率和正确性。对于具体的工程应用来说,由于诊断问题的分解和子任务分配的紧密联系,所以可以将子任务分解和子任务分配合称为诊断任务规划。在求解的综合阶段,由于各节点的知识和求解方法的不同,需要进行综合处理得到统一的全局解。子任务的分解可以采取不同的策略实现,主要有如下几种:
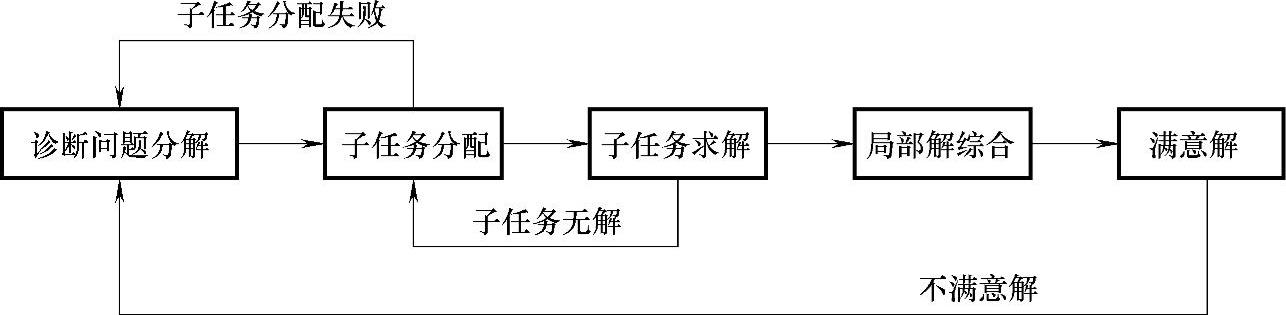
图6-8 分布式诊断问题的求解过程
1)基于设备工作状态的分解策略是利用设备动态运行过程中的各方面知识,划分监测和诊断任务,例如启动停止过程、空载和负载过程等。(https://www.daowen.com)
2)基于设备故障诊断过程的分解策略是根据诊断对象的故障类型进行逐层分解,上层故障由下层故障引起,下层故障为上层故障的特例,这种分析方法思路清晰,概念较具体,容易定位故障。将故障进行功能划分,形成状态监测、状态预测、状态识别、特征提取、报警处理、应急决策,根据这个过程实现任务的分解。基于不同诊断方法的分解策略结合了不同的诊断方法,如模糊数学、神经网络、模式识别、概率论和数理统计等。同时诊断中的知识表示也有不同的形式,如来自专家领域的知识、来自故障实例的知识、过程知识和推理得到的知识等,它们和诊断方法结合形成诊断过程的子系统。
3)基于设备功能的分解策略是依据系统的功能由高级到低级的分解方法,高层次的功能是由若干低层次的功能复合实现的。例如对于工程车,可以分为行走系统、转向系统、调平系统、动力源、微电控制系统、总线系统等。
4)基于设备结构的分解策略是把整机系统分解为下一层次的子结构,每一子结构又可分为更下一层次的子结构,直到最底层次。例如对于转向系统,是由转向机构和电液比例控制系统所组成,而转向机构又包含连杆机构、转向设备和角位移传感器等;而比例控制包含比例阀和液压缸等。比例阀的驱动信号又是由放大器产生的,而放大器的信号又是由总线节点控制的。这是因为任何设备都是由不同的子系统有机组合来实现的,因此最终可以将复杂设备分解为系统级、子系统级、部件级和元件级等多个层次,分别实现相应层次各子系统的功能。
同时,也可结合上述四种分解策略,构成混合式的分解策略,如可以在上层按照子系统分解,接着按照故障诊断过程进行分解,形成混合式的故障诊断分解策略。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




