集装箱正面吊运车是一种用以完成集装箱装卸、堆码和水平运输作业的机械,具有机动性强、作业效率高、操作简便舒适等优点,是码头、港口、中转站、铁路场、大型企业货场中集装箱堆码、装卸的重要设备。集装箱正面吊运车功能装置的特点主要体现在三个方面,即大臂(扩展作业范围)、吊具(抓取集装箱)、车辆底盘(行走运输)。三方面的有机结合才能构成一台功能强大、性能优良的集装箱正面吊运车。
1.PID控制算法
现实工作中,为了节约时间,驾驶员常在抓取集装箱后一边驾驶车辆行走,一边操作大臂,将集装箱升高到预定位置,待车辆停稳后,直接进行码箱操作。大臂的动作采用十字型双轴多功能手柄完成,手柄的前后、左右控制臂架的俯仰、伸缩。这种操作方式使得司机平常操作时,不但要时刻注意车辆当前的行驶状态,而且还要反复切换大臂的俯仰和伸缩,才能在车辆停止时将集装箱起升到理想位置。如果手柄的前后、左右可以控制臂架的垂直升降、水平伸缩,则在抓取集装箱后,只要分别向不同方向扳动几次手柄,即能将集装箱垂直起升到预定高度,然后水平移动到要放置位置的正上方,最后垂直下落到理想位置,那将大大减轻司机的劳动强度,提高工作效率。
大臂的垂直水平动作是指大臂能够自行调节伸缩和俯仰的程度,以完成在垂直方向和水平方向的纵移和平移,是联合俯仰和伸缩两个独立动作而完成的共同动作。PID控制算法控制大臂的伸缩和俯仰,能够使系统根据长度角度传感器的值,实现自动调整大臂俯仰角度和伸缩长度的功能,从而实现大臂的垂直升降和水平伸缩动作。
2.系统工作原理
根据PID的控制原理,大臂垂直升降和水平伸缩动作可以采用维持变幅或伸缩中的一个动作的动作程度不变,而只调节另一个动作的动作程度的方法来实现。
(1)垂直升降 图4-33所示为集装箱正面吊运车的结构图。大臂垂直升降运动中变幅动作是主要动作,所以我们给变幅液压缸比例电磁阀通以恒定的电流,记忆开始动作时大臂前吊点到后绞点的水平距离L,在系统运行过程中,根据式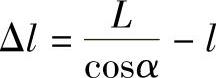 可计算出大臂应伸出长度与当前已伸出长度之差,该差值作为PID控制器的输入偏差,用PID控制器的输出控制大臂伸缩液压缸比例电磁阀的控制电流。式中α和l分别为长度角度传感器采集的当前大臂的仰角和长度。
可计算出大臂应伸出长度与当前已伸出长度之差,该差值作为PID控制器的输入偏差,用PID控制器的输出控制大臂伸缩液压缸比例电磁阀的控制电流。式中α和l分别为长度角度传感器采集的当前大臂的仰角和长度。
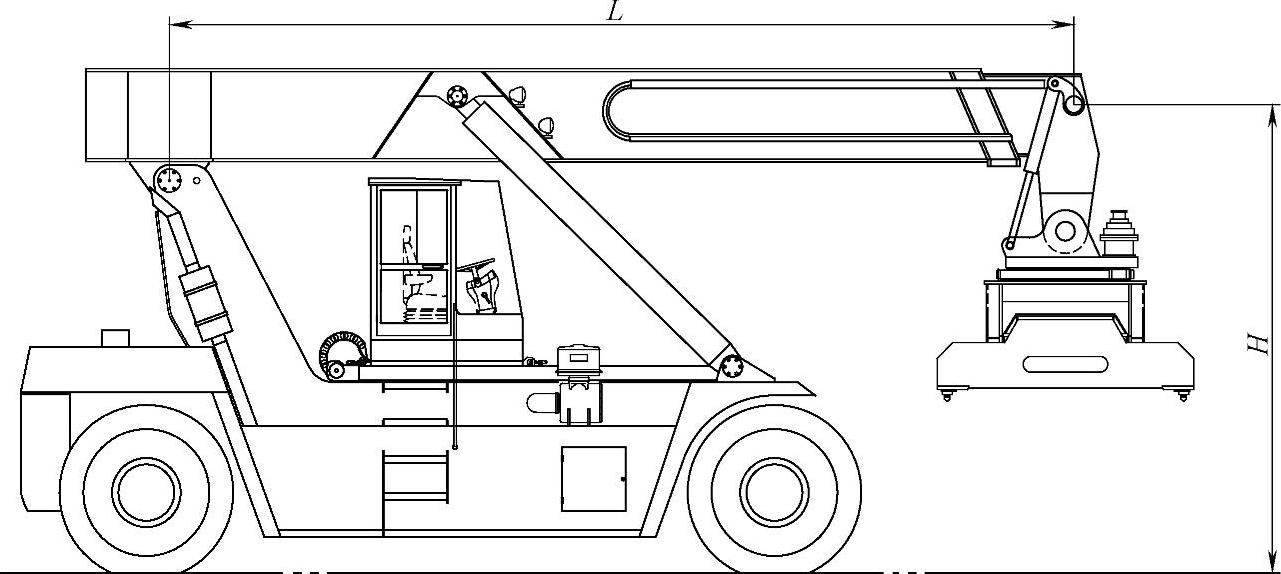
图4-33 集装箱正面吊运车结构图
(2)水平伸缩 大臂水平伸缩动作的PID控制和垂直升降类似,只是给伸缩液压缸比例电磁阀通以不变的控制电流,记忆的是大臂前吊点到水平面的垂直距离H。根据式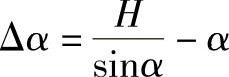 计算出PID控制器需要的变幅偏差,用以控制大臂变幅液压缸比例电磁阀的电流。
计算出PID控制器需要的变幅偏差,用以控制大臂变幅液压缸比例电磁阀的电流。
(3)系统参数设置 对于PID控制器参数的选择,要求被控过程是稳定的,对给定量的变化能迅速和光滑地跟踪,超调量小,在不同干扰和环境参数发生变化时控制应保持稳定。我们根据经验,采用凑试的方法,按照先比例、后积分、再微分的整定步骤,调节出了比较满意的PID参数。调节过程中,为了避免电磁阀开闭频繁造成系统不稳定的问题,关键需要注意的一点就是要保证被控对象的阀口(变幅比例电磁阀或伸缩比例电磁阀)在系统运行的任何时刻都是开启的,而开启程度的大小则由PID控制器来确定。
3.实验结果分析
由PID控制器控制的集装箱正面吊运车大臂垂直升降和水平伸缩动作的实验结果如图4-34a~图4-34p所示。其中,图4-34a~图4-34d分别显示了垂直升降的升过程中由长度角度传感器值计算得到的大臂前吊点到后绞点的水平距离变化,俯仰液压缸电磁阀控制电流和伸缩液压缸电磁阀控制电流的百分比变化,角度传感器采集到的大臂实时角度α,长度传感器采集到的大臂实时长度l。图4-34e~图4-34h显示的为垂直升降的降过程中各种量的变化。图4-34i~图4-34l显示了大臂水平伸缩的伸过程中由长度角度传感器值计算得到的大臂前吊点到水平面的垂直距离变化,以及其余各量的变化。图4-34m~图4-34p显示的为水平伸缩的缩过程中各种量的变化。(https://www.daowen.com)
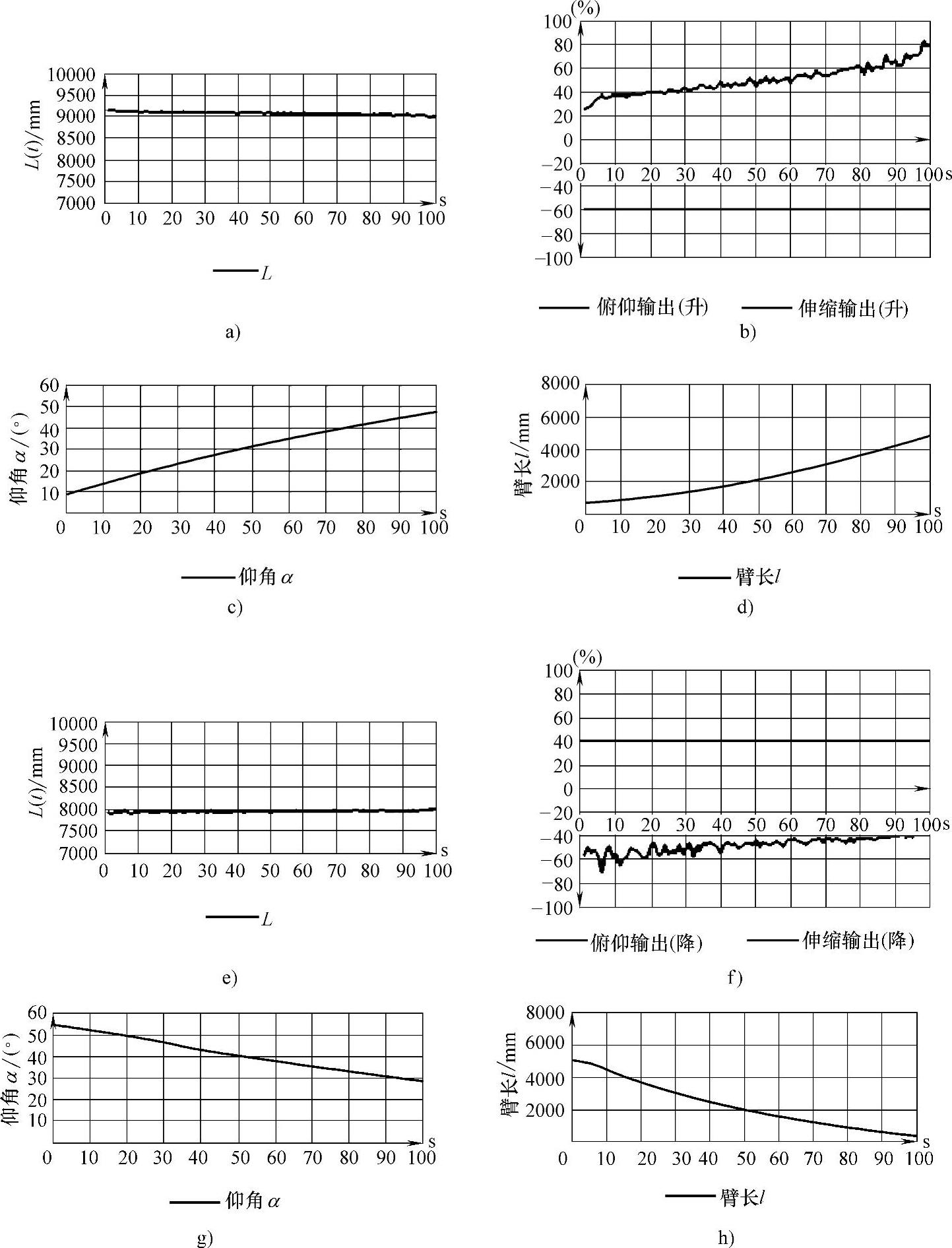
图4-34 大臂垂直升降和水平伸缩动作的实验结果
a)升过程L(t) b)升过程俯仰、伸缩电流百分比 c)升过程α的变化 d)升过程l的变化 e)降过程L(t) f)降过程俯仰、伸缩电流百分比 g)降过程α的变化 h)降过程l的变化
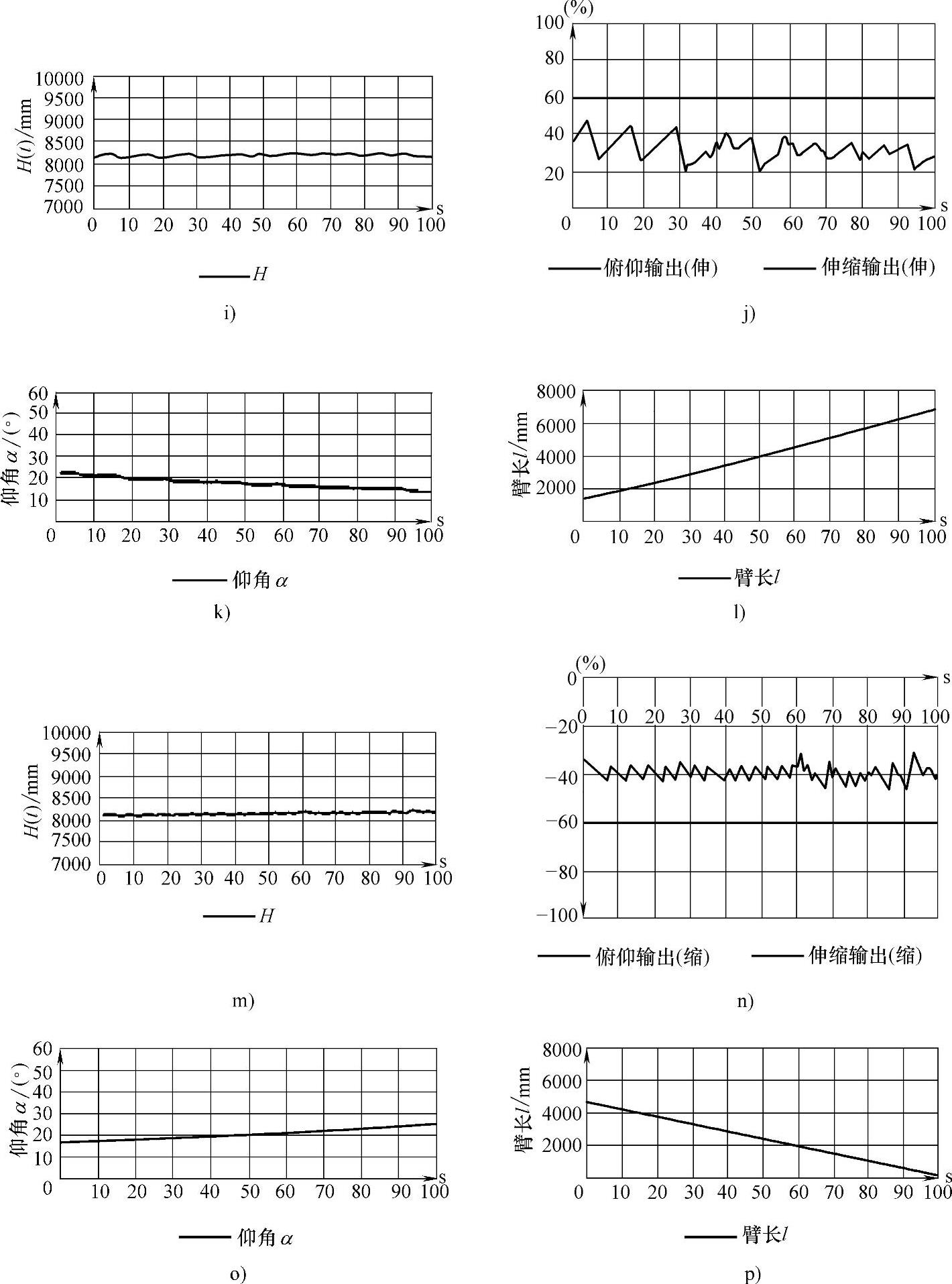
图4-34 大臂垂直升降和水平伸缩动作的实验结果(续)
i)伸过程H(t) j)伸过程俯仰、伸缩电流百分比 k)伸过程α的变化 l)伸过程l的变化 m)缩过程H(t) n)缩过程俯仰、伸缩电流百分比 o)缩过程α的变化 p)缩过程l的变化
由实验数据可以计算出升过程、降过程、伸过程和缩过程L(t)和H(t)的极差、标准偏差、方差分别如表4-6所示。
表4-6 垂直水平动作过程数据分析 (单位:mm)

极差可以表示数据的范围和集中趋势,标准差则体现随机变量取值与其期望值的偏差,方差的意义在于描述随机变量稳定与波动、集中与分散的状况。从表中可以看出系统运行过程中L(t)和H(t)的极差还不到0.1m,标准偏差和方差结果也很小,这说明垂直升降运动中大臂前吊点到后绞点的水平距离、水平伸缩运动中大臂前吊点到水平面的垂直距离很稳定,即利用PID控制器可以很好地控制集装箱正面吊运车大臂的垂直升降和水平伸缩动作。
利用PID控制器实现了集装箱正面吊运车大臂垂直升降和水平伸缩的动作,控制精度高,有着良好的动态特性。具有垂直水平动作功能的集装箱正面吊运车,手柄的前后、左右不是控制臂架的俯仰、伸缩,而是控制臂架的垂直升降、水平伸缩。这样驾驶员在吊装作业时就不需频繁切换大臂的变幅和伸缩动作,而只要向几个方向扳动几次手柄,即可准确地将集装箱提放到理想位置,大大简化了司机的操作、节省工作时间、提高了工作效率,有着非常好的节能效果和市场应用前景。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






